(5,) СИСТЕМА УПРАВЛЕНИЯ ТЕЛЕСКОПОМ

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления положением телескопа | 1975 |
|
SU681418A1 |
| Система управления телескопом | 1979 |
|
SU826273A1 |
| Устройство для управления оптическим телескопом | 1980 |
|
SU941942A1 |
| Устройство для управления телескопом на альтазимутальной монтиолвке | 1974 |
|
SU510691A1 |
| Устройство для управления положением телескопа | 1975 |
|
SU552592A1 |
| Система управления телескопом | 1984 |
|
SU1188699A1 |
| Система управления телескопом | 1978 |
|
SU805251A1 |
| Устройство для управления телескопом | 1974 |
|
SU511559A1 |
| Устройство для обнаружения и коррекции гнутой трубы телескопа | 1980 |
|
SU970295A1 |
| Оптическая следящая система астрономического телескопа | 1976 |
|
SU678465A1 |
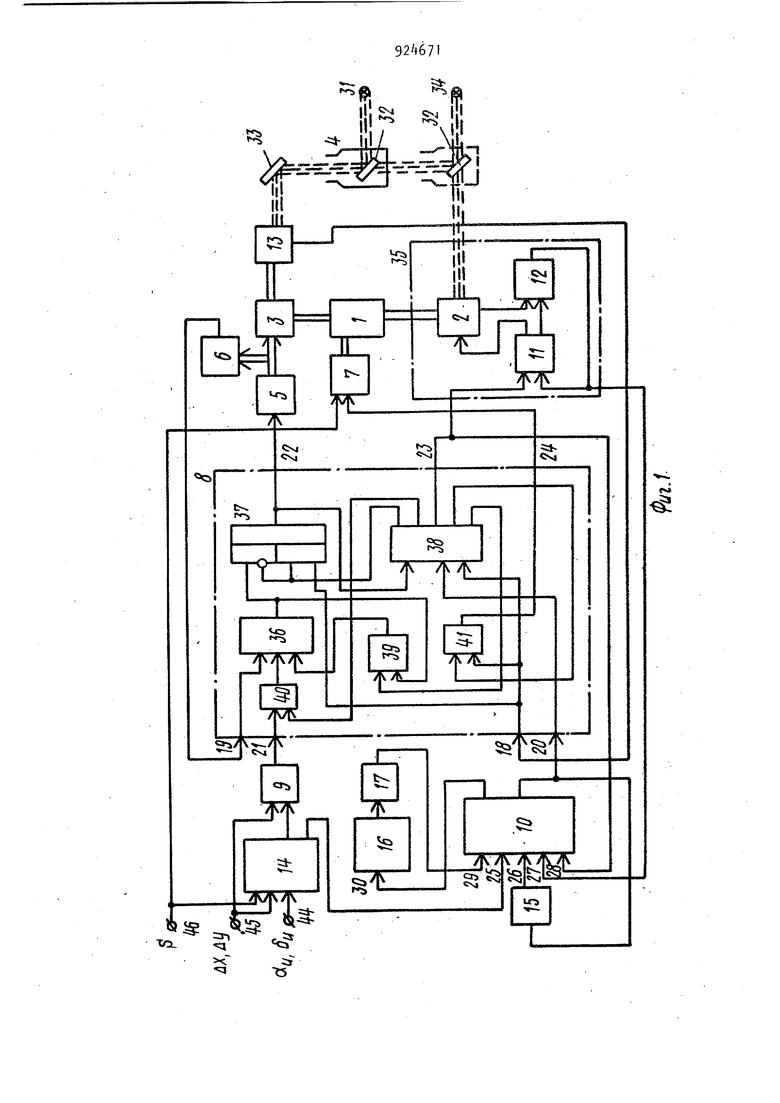
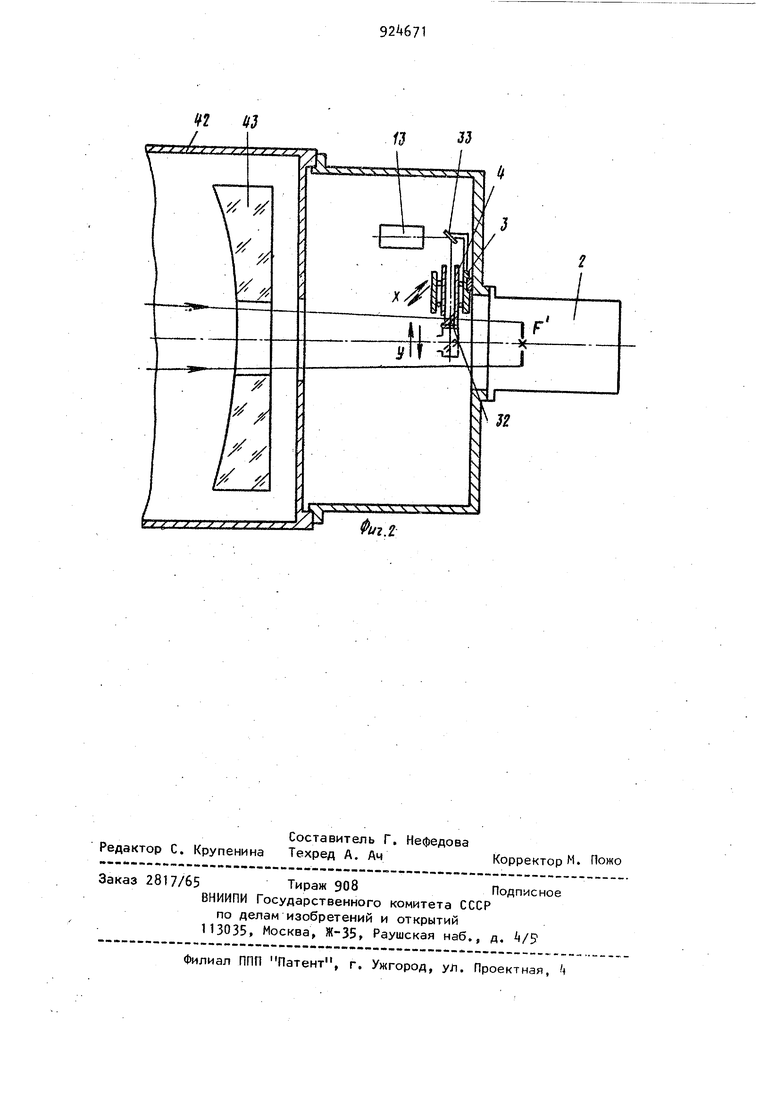
Изобретение относится к астропригборостроению и может найти применение при управлении оптическими астро номическими телескопами. Известна система, содержащая установленную на телескопе выносную трубу гида с (|ютоэлектрическим анализатором Эта система позволяет при управлении телескопом компенсировать дифференциальные гнутия между основной и вспомогательной трубами телескопа П. Недостатком указанной системы является наличие ошибок из-за дифференциальной рефракции при управлении положением телескопа от фотоэлек рического анализатора и ошибок от дифференциальных гнутий, которые не могут быть полностью скомпенсированы Известна также система, .содержащая фотоэлектрический анализатор, установленный на светоприемном прибо ре для научных исследований (например, cneKTporpacJre) и работающий по свету исследуемой звезды C2l, Указанная система неприемлема в случае применения приборов для научных исследований, у которых весь свет исследуемой звезды направляется на светоприемник прибора (электрскютометр, спектрофотометр и т,п.). В такой системе, следовательно гидрирование по исследуемой звезде невозможноНаиболее близкой к предлагаемой по технической сущности является система управления телескопом, содержащая устройство управления движением купола, пороговое устройство и блок программного управления, первый вход которого соединен с.выходом фотоэлектрического анализатора, второй вход с выходом преобразователя угол - код, первый выход с входом привода кареток, кинематически связанного с каретками и преобразователем угол-, код, второй выход с первым 3 . 9 входом блока управления светоприемни KOMj третий вход с первым входом при вода телескопа, кинематически связан ного с телескопом, на готором установлены сеетоприемник и каретки, на каретках установлены оптически с.вязэ)-1ные зонд и фотоэлектрический анализатор 31. Недостатками известной сис.темы яв ляются невысокая точность гидирова- ния вследствие того, что из-за отсут Ьтвия непрерывного гидирования i не отрабатываются быстроменяющиеся ошиб ки во взаимном положении телескопа и изображение звезды на светоприемни Кб5 точность отработки поправок в положении телескопа ограничена точ ностью преобразователей угол - код, установленных на осях телескопа, которая у современных телескопов не превышает 0,2-0р5 невысокая точност наведения телескопа на исследуемый объект, так как при работе с прибора ми типа фотометра и спектрофотометра невозможен режим непрерывного сканирования по двум, звездам, из которых одна является иссл-едуемой, невысокая точность наведения и гидирования из-за наличия дифференциальной реф™ ракции, невысокая точность регистрации светового потока электрическим светоприемником из-за- электрических помех во время движения купола. Цель изобретения повышение точности системы Поставленная цель достигаетсятем что в системе установлены блок анали за выполнения операций, таймер, блок анализа приоритета, сумматор и блок определения величины дифференциальной рефракции, первый вход которого соединен с первым входом системы, второй вход с вторым входом системы и первым входом сумматора, третий вход с третьим входом системы и вторым входом-привода телескопа, первый вь1ход с вторым входом сумматора а .второй выход с первым входом блока анализа приоритета, второй вход которого соединен с выходом таймера, третий вход с вторым входом блока уп равления св.етоприемником и выходом блока анализа выполнения операций четверть1й вход с вторым выходом блока программного, управления, пятый вход с выходом порогового устройства первый выход через устройстао управления движением купола с входом порогового устройства, а второй выход с входом таймера и третьим входом блока программного управления, четвертый вход которого соединен с выходом сумматора, первый вход блока анализа гпнполнения операций соединен с вторым выходом блока управления светоприемником, а второй вход с выходом светоприемниксЭ, На фиг« 1 представлена блок-схем,а системы; на фиг, 2 - конструкция трубы телескопа„ В блок-схему системы входят телескоп 1, светоприемник 2,. каретки 3, зонд if, привод 5, преобразователь 6 угол - код, привод 7, блок 8 программногс) управления, сумматор 9, блок 10 анализа приоритета, блок 11 управления светоприемником, блок 12 анализа выполнения операций, фотоэлектрический анализатор 13, блок k определения величины дифференциальной рефракции, таймер 15, устройство 16 управления движением купола, пороговое устройство 17, первый 18, второй 19j третий 20 и четвертый 21 входы блока 8 программного управления, первый 22, второй 23 и третий 24 выходы блока 8 программного управления, первый 25, второй 26, третий 27, четвертый 28 и пятый 29 входы блока 10 анализа приоритета, вход 30 устройства 16 управления движением купола, гидировочная звезда 31, плоскопараллельные пластины 32 и 33, исследуемая звезда 3, светоприемный прибор 35 для научных исследований (на пример, светофотометр) , сумматор 36, элемент 2И-2ИЛИ 37, командный блок 38, регистр 39, элементы И (О и 41, конструкция трубы 42 телескопа, rfiaBное зеркало 43телескопа, первый 44, второй 45 и третий 46 входы системы, где S - величина текущего звездного времени. Ах, ду - координаты гидировочной звезды относительно исследуемой, приведенные к фокальной плоскости фотоэлектрического анализатора 13 таким образом, что направление дх совпадает с направлением оси t телескопа, а лу - с направлением оси в телескопа; da и координаты прямого восхождения и склонения исследуемой звезды 34, Блок 14 определения величины дифференциальной рефракции рассчитывает величину дифференциальной рефрак ции как разность величин рефракций исследуемой 3 и гидировочной i 3 звезд. Величина рефракции зависит от координат t и J указанных звезд. Координата t исследуемой звезды В рассчитывается по формуле tu S - cCu , а координата t гидировочной звезды LO Л л I ж cos 5 где k - константа. Координата S гидировочной звезды 31 рассчитывается по формуле S2. Оц + kuy. Величина дифференциальной рефрак ции формируется на первом выходе блока 1, связанном с входом сумматора 9 на втором выходе вырабаты вается импульсный сигнал при измене нии величины Дифференциальной рефра ции на заданную величину по сравнению с величиной дифференциальной реф ракции в момент выдачи предыдущего сигнала о Устройство 16 управления движением купола при поступлении на его вхо сигнала О осуществляет синхронизацию положения купола с положением телескопа 1 таким образом, чтобы центр щели купола совпадал с положением трубы телескопа 1„ При поступле нии на его вход сигнала 1 синхронизация купола не производится, причем на выходе устройства 16 формируется код, пропорциональный величине рассогласования между положением купола и телескопа 1. Светоприемный прибор 35 для научных исследований работает по свету исследуемой звезды 3ч. Входящий в него блок 12 анализа выполнения операции осуществляет анализ операций По критериям, связанным с работой всей системы, на его выходе в кодиро ванном виде формируется следующая |информация„ : Светоприемный прибор 35 для науч;ных исследований выполняет операции, не требующие в текущий момент времени поступления на светоприемник 2 света исследуемой звезды 3 (например, перемещение дифракционной решет ки, установка диафрагм, фильтров и т.п.), далее эти операции называются вспомогательнщми, во время их выполнения на выходе блока 12 анализа выполнения операций формируется дво;ичный код 10000. 6 Включена экспозиция, причем требования, предъявляемые экспозицией могут быть следующие: повышенная точность слежения за исследуемым объектом (при этом формируется код 01100 на выходе блока 12), недопустимость прерывания экспозиции (код 01010), отсутствие электрических помех от движения купола башни телескопа 1 (код 01001). Прибор 35 не работает (код 00000). Блок 10 анализа приоритета формирует на своих выходах команды в зависимости от приоритетности сигналов, поступающих на его входы. Система управления телескопом работает следующим образом. Система начинает работу после осуществления грубой установки телескопа 1 наисследуемую звезду 3, во время которой прибор 35 не работает, и по коду 00000 на выходе блока 12 блок 10 анализа приоритета формирует на входе 20 блока 8 сигнал Сброс, по которому командный блок 38 обнуляет регистр 39. Система начинает работать с выполнения прибором 35 вспомогательных операций, при которых на выходе блока 12 формируется код 10000, поступающий на вход 27 блока 10, который независимо от поступивших на другие входы сигналов устанавливает на выходе, связанном с устройством 16, сигнал О, по которому устройство 16 производит синхронизацию положения купола с положением телескопа 1, и на выходе блока 10, связанном с входом 20 блока 8, устанавливает сигнал .включить режим программного управлеРежим «программного управления пред назначен для коррекции положения телескопа 1 и зонда и обеспечивает точное наведение телескопа 1 на исследуемую звезду З и зонда Ц на гидировочную звезду 31. Режим прогаммного управления включает в себя три последовательно производимые перации. Операция установки зонда А в положение х 0; у 0. По сигналу на входе 20 блока 8 программного управления Командный блок ЗВ подает а вход элемента И 0 сигнал О, акрывая тем самым его о При этом упавление кареток приводом 5 (перемеающим каретки 3) производится по 79 .сигналам рассогласования между кодом .X - 0; у -- О, поступающим с выхода элемента И 4о, и кодом с преобразователя 6 угол - код (с выхода регистра 39 поступает также код 0). Это рассогласование вырабатывается сумматором Зб и проходит через эле- . мент 2И-2ИЛИ 37, открытый сигнал О поступающим с выхода командного блока 38. Оканчивается эта операция перемещением зонда k в положение :Х 0 у - О, обозначенное пунктиром на фиг, I и 2о Операция корректировки положения телескопа 1 включается командным блоком 38 при наличии кодов равных поступающих на вход командного блока 38 с выхода элемента 2И-2ИЛИ 37 по окончании первой операции Свет от исследуемой звезды 3 через плос ко-параллельные пластины 32 и 33 попадает на фотоэлектрический анализатор 13 на выходе которого формируют ся сигналы, пропорциональные отклоне нию изображения исследуемой звезды 3 от оптической оси телескопа. Эти сиг налы, проходя через элемент И 41, от крытый по сигналу 1 командного бло ка 38, управляют приводом телескопа 7, перемещая телескоп 1 в положение, при котором изображение звезды 3 бу дет находиться точно на оптической оси телескопа 1. Эти движения накладываются на отработку приводом телескопа 7 суточного вращения Земли, пр-оисходящую по текущему звездному времени S, поступающему на третий вход k6 системы. Операция установки кареток 3 на гидировочную звезду 31 включается по завершении второй операции, KOI да на выходе фотоэлектрического анализатора 13 сигналы рассогласования, поступающие на вход командного блока 38, станут равны 0. При этом блок 38 путем установки соответствующих сигналов на своих выходах закрывает элемент И 41, открывает элемент И 40 и открывает элемент 2И-2ИЛИ 37 для прохождения кода с выхода сумматора 36 о Сумматор 9, суммируя значения Л X и iiy, поступающие на второй вход 45 системы, со значениями, величины дифференциальной рефракции, поступающими с блока 14, формирует Axj Д у расчетные значения удаления изо ражения гидировочной звезды 31 от оптической оси телескопа 1, измеренные в фокальной плоскости фотоэлектрического анализатора 13. Коды, пропорциональные этим значениям, проходя через элемент И 40, сумматор 36, элемент 2И-2ИЛИ 37, отрабатываются приводом 5 кареток, и аналогично первой операции зонд 4 перемацается в положение х &х , у Ау, обознаи 2 сплошными линиченное на фиг, ями„ В этом положении свет от гиди-i ровочной звезды 31 попадает черезплоско-параллельные пластины 32 и 33 на фотоэлектрический анализатор 13, По окончании отработки приводами 5 кареток величин Ах; А у на выходе элемента 2И-2ИЛИ 37 формируется код О, по которому блок 38 подает на. вход элемента 2И-2ИЛИ 37 сигнал. 1, обеспечивающий прохождение через него только кода с вб1хода фотоэлектрического анализатора 13. Этим реализуется коррекция положения зонад по изображению звезды 31 Третья операция заканчивается тем, что зонд 4 устанавливается так, что изображение звезды 31 находится на центре фотоэлектрического анализатора 3, причем (5 X и 5у - величины, на которые скорректировалось положение зонда 4, запоминаются в регистре ,39 по сигналу с выхода блока 38, сея .занного с входом регистра 39о В .течение режима программного управления на выходе 23 блока 8 формируется сигнал 1, который, поступая на вход блока 11, разрешает выполнение- прибором 35 только вспомогательных операций. По окончании режима программного управления по сигналу О на выходе 23 блока 8 блок 11 управления светоприемником включает экспозицию подачей соответствующих команд на светоприемник 2, на который поступает свет от звезды 34, и блок 12, формирующий на своем выходе в закодированном виде требования, предъявляемые экспозицией к системе управления телескопом, Во время экспозиции с выходов командного блока 38 поступают сигналы 1 на элементы И 40 и 41 и сигнал О на вход элемента 2И-2ИЛИ 37. При этом положение телескопа 1 корректируется по сигналам фотоэлектрического анализатора 13, которые проходят через элемент И 41 и управляют приводом 7 телескопа. 9 С изменением во времени положения телескопа 1 вследствие изменения ве личины дифференциальной рефракции изменяется взаимное положение изобра жения гидировочной 31 и исследуемой 3/ звезд в фокальной плоскости телескопа 1. Для компенсации этого изменения каретки 3 непрерывно перемещают зонд k на величину дифференциальной рефракции, поступающую с выхода блока Т. При этом сигналы, управляющие приводом 5 кареток, проходят через элемент 2И-2ИЛИ 37 с выхода сумматора 36, который формирует их как разность между суммой Дх; их по X и ду; & у по у и величиной фактического положения кареток 3Блок 10 анализа, приоритета после окончания режима программного управления, определяемого поступлением сигнала на его вход 28, в соответствии с заданной приоритетностью входных сигналов вырабатывает команды на работу устройства 16 управлени движением купола и включение вновь режима программного управления. Если нет возможности удовлетворить всем инструкциям, поступившим на входы блока гО, то он выбирает предпочтительное требование и регистрирует возникшее противоречие в требованиях например на печатающем устройстве, с целью учета его при последующей обработке полученных прибором 35 результатов „ Рассмотрим возможные варианты работы. На вход 27 блока 10 анализа приоритета с выхода блока 12 анализа выполнения операций во время экспозиции поступает код 01100. В этом случае на выходе блока 10, связанно с устройством 16, непрерывно присутствует сигнал О, при этом непрерыв но осуществляется синхронизация дай|жения купола с движением телескопа 1 Начавшаяся экспозиция прерывается включением режима программного управ ления, задаваемого соответствующей командой на выходе блока 10, связанном с входом 20 блока 8, тем самым обеспечивается коррекция положения телескопа 1 и зонда k с последующим продолжением начатой экспозиции. Блок 10 анализа приоритета задает режим программного управления, если на его вход 2б с выхода таймера 15 поступает сигнал о том, чтос момен7та последнего запуска режима программного управления прошло отсчитываемое таймером заданное время, это уменьшает вероятность возникновения оши- бок в положении телескопа 1 вследствие потери гидировочной звезды 31 на его вход 25 поступает подряд два сигнала с выхода блока 1, между по(туплениями которых не включался режим программного управления, это обеспечивает уточнение по звездам величины дифференциальной рефракции, отработанной зондом 4, На вход 27 блока 10 анализа приоритета поступает с выхода блока 12 анализа выполнения операций коц 01001 или одновременно коды 01100 и 01001 В этом случае во время экспозиции по сигналу 1 на выходе блока 10, .связанном с устройством 16, синхронизация движения купола с движением телескопа 1 не производится, величина рассогласования между положением купола и телескопа 1 с выхода устройicTsa 16 поступает на пороговое устройство 17, где она сравнивается с величиной, определяющей максимально допустимое рассогласование, по достижении которого на вход 29 блока анализа приоритета поступает сигнал, который, как и сигналы на входах 25 и 2б в первом варианте работы, вызывает прерывание начатой экспозиции с включением программного режима работы, в течение которого куполом отрабатывается накопившееся.рассогласование. На вход 27 блока 10 анализа приоритета поступает код 01001 В этом случае поступление сигналов на входы 25, 2б и 29 блока 10 не вызывает прерывание экспозиции, но возникшее несоответствие требований регистрируется. Если на -вход 29 блока 10 анализа приоритета поступил сигнал, то купол отрабатывает рассогласование по сигналу О на выходе блока 10, связанном с устройством 16, одновременно с продолжением экспозиции, это противоречие также регистрируется. Предлагаемая система за счет наличия коррекции положения телескопа 1 кареток 3 с фотоэлектрическим анаизатором 13 а также компенсации веичины дифференциальной рефракции позоляет обеспечить точность наведения елескопа на исследуемую звезду З не уже 1 при наличии непрерывного авоматического гидирования во время экспозиции, что в 10 раз превышает томность лучших известных систем управления телескопом, имеющих непрерыв ное автоматическое гидирование. За счет исключения помех от электрических цепей купола на светоприемни точность системы увеличивается дополнительно приблизительно вдвое. Формула изобретения Система управления телескопом, содержащая устройство управления движением купола, пороговое устройство и блок программного управления, первый вход которого соединен с выходом фотоэлектрического анализатора, второй вход с выходом преобразователя угол код, первый выход с входом привода кареток, кинематически связанного с каретка ми и преобразователем угол- код, второ выход с первым входом блока управления светоприемником, третий вход с первым входом привода телескопа, кинематически связанного с телескопом, на котором установлены светоприемник и каретки, на каретках установлены оптически связанные зонд и фэтоэлектрический анализатор, о т личающаяся тем, что, с целью повышения точности системы, в ней установлены блок анализа выполнения операций, таймер, блок анализа приоритета I сумматор и блок определеимя величины дифференциальной рефракции, первый вход которого соединен с первым входом системы, второй вход с вторым входом системы и пе|эвым входом сумматора, третий вход с третьим входом системы и вторым входом привода телескопа, первый выход с вторым ВХОДОМ.сумматора, а второй еыход с первым входом блока анализа приоритета, второй вход которого соединен с выходом таймера, третий 1с вторым входом блока управления све1топриемйиком и выходом блока анализа (выполнения операций, четвертый с втоJpuM выходом блока программного управ|ления, пятый вход с выходом порогово го устройства, первый выход через устройство управления движением купола с входом порогового устройства, а второй выход с входом таймера и третьим входом блока программного управления, четвертый вход которого соединен с выходом сумматора, первый вход блока анализа выполнения операций соединен с вторым выходом блока управления светоприемником, а второй вход с выходом сэетоприемника. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 552592, кл. G 05 D 1./00, 1975, 2.Авторское свидетельство СССР № 68U18, кл. G 05 В 15/02, 1975. 3.Авторское свидетельство СССР №510691, кло G 05 8 15/02, 197 (прототип).
Л
:э «ч О
III
1 1
