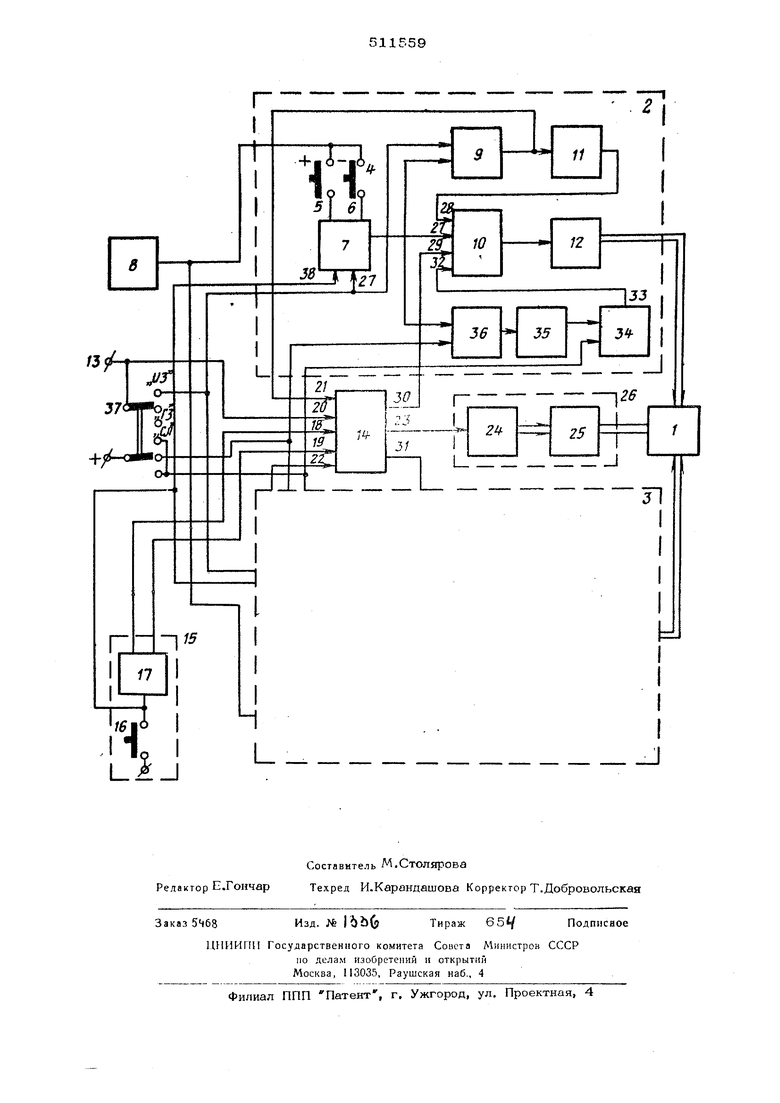
Изобретение относится к устройствам цпи управления телескопами на апьтазимутальной монтировке И можеч найти применение в системах управления крупных, и средних оптических телескопов. Известно устройство управления телеск. пом на альтаэимутаяьной монтировке, содержащее генератор импульсов, выход которого подклзочен к клавишам ручной коррекция, вычислительный блок, одаи. из входов подк.гао чены к блоку ВБОда данных, выходы которого подключены к другим его входам, механ1 з компенсации вращении поля, имеющий приборный цифровой следящий привод, подключенный к..рму .из выходрв вычислительного блока, два блока управления, содержашие последова-тельно соединенные счетчик импульсов и сум матор, выход которого соединен с входом цифрового следящего ггрнвода, выходной вал которого связан с телескопом, посг едовате,- j ifibHO соедишииые первый элемент И и пср вый регистр; выход которого подключен ко -второму входу сумматора: клавииш ручной коррекц11И соединены с входом счетчика имгтульсоБ, выход которого связан с одним из входо.-, первого элемента И % причем выхол ПОПБ:ЛМ-: элемента каждсж О блока упрйБлекия с соответствуюшйм входомвычис.шгс.клтого блока, с одним из выходов которого связа третий вход сумма-. тора, а в каждом блоке 5правления с вторым входом первого элемента соединен ршш из Бходов счетчика мкзпульсОБ, Однако, если погрешность наведения и введения телескопа компенси|эуемая приполуавтоматической коррекции и обусловлена -не только неточностью задакня координат прямого восхождения (а ) и склонения С5 ) людаемого объекта, но и инструментальными погрешностями телескопа, например изгибом трубы, а тйКпсе погрешностью из-за рефракции, тоточность слеженпя телескопа за иоследуемым объектом будет низкая. Этю вызвано тем, что скорректированные йначенвя координат будут отличаться от истйнных значений координат исследуемого объекта. В результате расчетные значения азимута (А), зенитного расстояния ( Z ) и Гпар.аллактнгчес-. ксго угла (F) бъекта будут рассчитываться неточно. Это приводит. к быстрому росту ошибок слежения телескопа и ошибкам механизма компенсации вращения поля, устан ОБ леннгло, например, в стакане первичног фокуса, что в свою очередь, приводит к раЬ мазыванию изображения, особенно объектов, находящихся на краю Кассеты. Данное устройство отличаемся тем, что в него введены переключатель и в каждый блок управления последовательно соединен-. ные третий элемент И, второй регистр и второй элемент. , выход которого подклзЫ чен к четвертюлу входу сумматора, первый вход первого элемента И связан с одаим из входов третьего элемента И , .вторые, входы второго и третьего :элементов fVl ,с оединены с переключателем, связанным с шиной временныхИмпульсов и вторым первого элемента . Такое выполнение позволяет повысить точность слежения телескопа, На чертеже представлена блок-схема уст ройства. Телескоп 1 на альтазйьзутаяьной NSOHTVI- ровке управляется блоком управления 2 по оси 2 и блоком-управления 3 по оси А. Каж дый из этих блоков включает в себя кпави шу ручной коррекции 4 а 3aBHcv M:)Cra от положения клахэидци на вход 5 сложения или вход 6. вь)Члтания. счетчика имгсудьсов 7 постугшют импульсы от генератора импупъ сов 8. Код счетчика импульсов поступает I на вход первого элемента W 9 и сумматор 10, связанного с первым регистром 11, Цифровой следящий привод телескопа 12 нозво/шет в сооп..етствии с кодом, поступившим на его вход, осуществлять разворот телескоп на заданный угол. По шине временных импуЛ сов 13 подаются маркеры с частотой, определяемой бысч-родействием вычислитепьногр блока 14. Исходные координаты набшодаемого объекта формируются блоком ввода 15, содержащим клавишу Ввод 16, при : нажатии на которую с узла ввода 17 он к поступают на входа 18 и 19 вычислительно го блока, вход 20 которого подключен к шине 13,вход 21 к выходу элемзнта . 9 блока 2, вход 22 -« -к блоку управления ; 3, а выход 23 - к приборному цифровому ; следящему прйвод 24, осущаствляюшему вращение поворотнсйго стопа 2S механизма компенсации вращения поля 26. Первый вход 27 суммати а подключен к счетчику, второй вкод 28 -. к регистру 11, третий вход 29 сумматора блока 2-к выходу ЗО вычислительного блока, а третий вход 29 сумматора блока 3-к выходу 31 вычислительного блока, четвертыйвход 32- к выходу 33 второго элемента И 34, связанного с вторым регистром 35, Третий элемент И 36 подключен к пороключателю 37, который в положении Гидировочная звезда (ГЗ) подключает сигал соответствующий I к входам элемента И 36. Переключатель 37 в положении Йсспедуе ая звезда соединяет шику 13 свходом 27 подключает сигнал сбб.гвэтствующий 1 входам элемента Ц 34, в положении пе зеключателя Слежение (СЛ) на элемент lA 34 также подается Сйгиап , на об« ; уляющий вход 38 счетяика 7 поступает сиг, an при на катии клавиши 16, Известны формулы пересчета данных объек« а наблюдения кз экваториальной системы оординат в аасшутальную систему кофдинат: i COS 2--si n V sin (f COS COS cf COS i ; 0 cosfj sin, cost coB sinV- Bin COS COS t COScf Bin Ф -Gift COS- Ч Qjfj 7 -L-... -,COS A Bin h - . ; г sm 2 coS(/ sin f Slnc cos-f ccsi где t часовой угол, f. широта места уста новки телескопа. Для малых приращений ао,дб, Л/ к лИ справедливы формулы, точность которых обрат но пропорциональна величинам и Л , Z l A/ slnZslnp-&z cosp ; (б) Ш ..(7) Вычислительное устройство расчитывает спедук -. шив значения опорных точек для l + i та времени ; а- и,- 2 л а/ d :6b-|.i А ; 2-arc Cos Z; IP-arc Co$ p, где , .л к- промежуток времени, в течение которого переключатезъ 37 находится в положение формулах () зйачение t берется для . i -ь 1 маркера в|1емени. Рассчитанные вычислительным блоком зна чения А и 2 поступают соответственно на его выходы 31 и 30, В промежутках времени между маркерами вычислительное устройство ; производит экстраполяцию р ассч 1танных значе ний А и Z . Устройстйо работает следующим образом. Перед тем, как насости телескоп- на ис следуемый объект осуществляют наведение его на гидировочную звезду,, координаты которойО , 5f. известны с высокой точность и .-гаКовЫ5 что она попадает в поле зрения вместе с исследуемой звездой, например на фотопластишо, на которой осуществляется в нашем случае регистрация .звездного поля. Ввод координат звез.ды в вычислительный блок осуществляется узлом-врода в момент нажатия клавиши , нрехшарительно в случав Бвода гидировочной звезды переклю- чатепь 37 должен быть переведен- в поп.О жение ТЗ, Счетчйк 7 в нажа-том положении клавиши 16 обнугщется. Телескоп наводигся по рассчк -- -н « танным вычлслптельным блском координатам координатам А и Z для и Sf на гидировочную звезду с погреишостями. определяемымиинструмеитальнь ми ошибками его и другими погрешностями, например за рефракцию и r нyтыe трубы. Оператор, наблюдая на видеоконтрольном устройстве гидировочную звезду и воздействуя на клавиши ручной коррекции 4, приводит Gf; Б цгмятр видеоконтрольного устройства, ко-торый доюкен совпадать с центром вра) поворотного стола 25, на которой расположена кассета с фотопластинкой. Это коррэкщонное движение осу ществляется за счет того что через . тие,. клавиши 4 iимпульсы с генератора 8 бу-. дут поступать йа счетчЕк 7, код с зaдaнны i знаком, пропорниопальньйврейени нахож дения клавИШи в замкнутом состоянии, посту пит со сч8тчика через элеьои.т W 36 15 IperHcip 33 и на вход сумматора, который, просуммировав его с рассчитанным вы-.-; -- . - - -, .. чиспительным блоком энв ением,выдаст резул тирующий код на отработку Цифровым следя- шим привойом телескопа. Псюле окоичапйя :оррекционного движения код, пропорциональный значениям погрешносг тей на.ввяеиия телэскша на :гидировоч1гую звезду /iAf. я д2|. будет храниться в ветствующ15х резисторах 35 и непрерывно поступать на вход сумматора, Далее оператор должен перевести переклю чатель 37 в положение, и ввести коор-. динаты исследуемого объекта СК и 6 . и и При этом в момент нажатия клавиши 16 счетчик 7 обнулится. Телескоп, по данным вычислительного блока, рассчитатшым для координат Of и с учетом величины коррекции, хранимой в регистарх 35, должен невестись на исследуемый объект точно, так 60 как практически инструментальная погрешность телескопа для координат Cf, ( . ii г -г; одинакова. Однако вследствие того, что, как правило, для йсслед емого объекта оператору неточно известны его истинные координатй (обозначим их ц и f. - ---- ,-иU результатом этой погрешности-явится бМ ё щение исследуемого объекта по отношению центра Бидеоконтрольного устройства. Нан атйем на- клавиши 4 оператор будет управлять коррекционным движением тепескода, приводя-.исследемый объект в центр. Допустим оператор начинает коррекционное feiiжение после прихода / - I маркера времени ПО шине 13. Код счетчикш 7 поступает на вход с -мматпра, в результате на движение телескопл; обязанное координатам Of , § г, А 2 которые будут постоянно -nocTj narb г г. через чэткрытые &дементы 34 из регистров 35, будет накладываться дополнительное коррекционное движение.. Д1 о приходу i маркера врем-энп .срабатьтает элел5еит И 9j код со счетчиков поступает на вход вычислительного блока, а также записывается в регистры 11; счетчики после этого o6iryrляются. Вычислительный блж таким образом после прихода (, маркера рассчитывают по 0|, на время t , равданным &hi ное i +1 мо1.;енту значения А И Z Этот ггроцесс длится в течение вре™ мени между I и i +1. В этот же промежуток ремени на входсумматора 10 поступает код c4eT4nKaj накопленный после i. момента .времени, код с регистров 11, рйЬный величине коррекции за период с 1 «-I до / . мента времени, из регистров 35 код-CODTвеотвешю ЛА или aSr- и вычисл ггельнаго блока экстраполированные значения координат А ита Z По приходу +1 маркера на выход вычис пительного блока поступают значения А и Z с учетом величины коррекции за время ieждy : 1, -1 и t моментами времени, а лта . пичина в pervTCTpax 11 стирается Остальное происходит аналогично описаннп-. Kiy выше процессу для I маркера. : Таким образом, оператор как бы ведет коррекцию по Ая2в течение времени 2. hi , где .Д1 промежуток времени между последовательно приходящими маркерами, а накорректированные величины за предыдущее время уже присутствуют пересчитанными в Of и (§ , Тем несмотря на ошибки, внocи 5tIe за счет неточности формул (4) и- (7), оператор, наблюдая на видеоконтрольном устройства процесс коррекпионнса о движения, коррек гирует положение телескопа с учетом наличия и этих погрешностей.
После приведения исЬледуемой звезда в нентр видеоконтрольнш- о. устройства в выч |пительно блоке будут храниться Пft ДдО(:и ,S.U тем ca vibiM 1будут известны HccneuyeMts o |э ъекта.. , ... рператор, должен, перевести пер пючатель 37 в положение и в процео се слежения телескопа за исследуемым объ ектом по результатамВизуальных набпюде« НИИ производить пощ автоматйческ то, цию положения Т1алеск1:и.я&по А и . При этом накорректированные an э-т-эт .период времени значения буодт накаливаться в счетчиках 7 и управление по осям Аи/Я... телескопа будет происходите по расчетным .значениям А и Z вычисгагтепьного блока, полученным по формулам (1.). (1О)к (11) для значений; Of-- и , СП ож. энным , Л 2 и соответственно с кодами ДА г кодами счетчиков 7. Вращение поворотного стола 25 доллсно осуществляться со скоростью Р, начальное значение угла Р произвольное. Это реали«« зуется вычислительным блоком, который ф0)мируется на выходе 23 код, отрабатыв емый приводом 24, Р «Р Р. , отр о 1где Р - текущее значение параллактичес кого угла; Р - значение параллактического угла в момент ввода координат наблодаемого объекту; Р и Р рассчитываютбя-вычислительным блоком пo. (12) В процессе спежения за исследуемой звездой управление .поворотным стоком пр изводитс ПD данным точных координат С( и 6 исследуемого объекта, причем полуавтоматическая коррекция положения телес кетта не влияет на врашениеповоротнсй- о стопа. ОтлйЧйтвгаьной особе1даостью устройства является то, что ди4)ференциалЪный отсчет I координат 0( f6 зввзд по положению их на экране ьидеоконтрольнге о устройства невозможениз-за того.что поворотнь 5 8
,.,
; СТОЛ не имеет абсолютитаго отсчета этих :координат,
Таким образ сад устройство позволяет практически исключить влияниепогрешноо- тей исход1« 1х данных СХ и (S наблюдае-. мого объекта на качество слежения телесй{| гш н компенсацию параллактического угла Р. Тем самым устраняются я° ® ПэнУе погрешности, вносимые алЪтазимутальной монтировкой телескопа по сравнению с пач раллактйческ й монтировкой. Формула изобретения Устройство для управления телескопом на.альтазимутальной монтировке, содержащее генератор импульсов, выход которого подключен к клавищам, ;ручной коррекций, вычисли, телышй блок, один из входов подключены к блоку ввода данных, выходы- которого подключены к другим его входам, механизм ком пенсации вращения поля с цифровьи-л следящим Ьриводом, ; подключенный к одному из выходов вычислительного блока, блокн управления. : содержащие последовательно соедййенные счетчик импульсов и сумматор, выход кото рого соединен с входом цифрового следящего привода вал которого связан с телескопом, последовательно соединенные первый элемент И и первый регистр, выход которого подкшо.чен ко BTOpots-iy входу сумматора; :жлавиши ручной коррекции соединены со вхт)дом счет чика импульсов, выход которого связан с од- ним иа входов первого элемента И при чем выход первого элемента каждого блока управления соединен с соответствую шим входом вычислительного блока, с одним из выходов которого связан третий вход сумматора, а в каждс-: ; блоке упрайлеиия -со вторым входом первого элемента ; соединен один из входов счетчика импульсов, отличающееся тем, что, с целью повыщения , точности, слежения зге-лескопа, в него введены переключатель и в каждый блок управления последовательно соединенные третий элементы. в,торой регистр и второй эпёме нт , ёыход которого подключен к четвертому входу ,сумма. тора, первый вхбд первЪго элемента И связан с одним из входов третьего элемента И, вторые входы второго и третьего элемент тов И соединены с гвэрекшочателем связйн« ным с шиной временных импульссв и вторым .входом нерв СИРО элемента IM.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления телескопом на альтазимутальной монтиолвке | 1974 |
|
SU510691A1 |
| Система управления телескопом | 1979 |
|
SU826273A1 |
| Устройство для полуавтоматической коррекции положения азимутального телескопа | 1973 |
|
SU481022A1 |
| Система управления телескопом | 1979 |
|
SU924671A1 |
| Телескоп | 1983 |
|
SU1108379A1 |
| Устройство для управления положением телескопа | 1975 |
|
SU552592A1 |
| Система управления телескопом | 1984 |
|
SU1188699A1 |
| Устройство для полуавтоматической коррекции положения телескопа | 1975 |
|
SU684511A1 |
| Устройство для управления наведением телескопа | 1974 |
|
SU560213A1 |
| Фотоэлектрическая следящая система гидирования телескопа | 1984 |
|
SU1228068A1 |