Предлагаемое устройетво управления относится к области ириборостроеиия и 1может найти применение в системах для автоматического управления крупными и Средними оптическими телескопами. Известно устройство для управления телескопом, содержащее оптическую систему для обнаружения и комиеисации гнутия трубы зеркального телескопа или смещения его оптических осей 1, в которой для определения гнутий трубы телескопа используется специальная светящаяся марка. Для автоматической компенсации гнутий в такой системе необходимо иметь наряду с фотоэлектрической системой гидирования еще дополнительную фотоэлектрическую систему, -работающую по свету этой марки. Такая система усложняет конструкцию телескопов, особенно больших, наличием светящейся марки и оптического тракта, значительно увеличивает размеры внещней тидирующей оптической трубы (трубы гида), требует наличия дополнительной фотоэлектрической системы, работающей по свету марки. Известна и другая система управления положением телескопа 2. Однако она не -комленсирует величину дифференциальных гнутий между трубой -гида и трубой телескопа, -поэтому точность управления положением телескопа в режиме автоматического гидироваиия телескопом ухудщается на эту величину, которая достигает 20- 40. Наиболее близким техническим рещением к изобретению является устройство для управления положением телескопа, содержащее программный блок, первый и второй выходы которого подключены к первому и второму входам логического блока, первый выход логического блока подсоединен к одному входу сумматора, другой вход сумматора -к третьему выходу программного блока, а выход - к цифро-аналоговому приводу, связанному через дифференциал, соединенный с преобразователем угол - код и через редуктор с двигателем точной коррекции, с приводом телескопа, и гид, состоящий из коррекционной пластины, связанной через редуктор с двигателем, фотоанализатора, выход которого подключен к входу усилителя 3. Недостатком такого устройства управления телескопом является отсутствие автоматического ввода поправок от величины дифференциальных гнутий, снижающее точность автоматического гидирования телескопом. Цель изобретения - повыщение точности устройства. Это достигается тем, что в устройство введены дополнительный сумматор, запоминающий регистр, элемент И и дополнительный логический блок, первый вход которого подсоединен к выходу усилителя, второй - к второму выходу программного блока, связанному с первым входом запоминающего регистра, третий вход - к первому выходу программного блока, связанному с первым входом элемента И. Выходы дополнительного логического блока подключены -к двигателю точной коррекции и двигателю коррекционной пластины, первый вход дополнительного сумматора - к выходу преобразователя угол-код, второй вход - к четвертому выходу программного блока, третий вход - к выходу элемента И, второй вход которого -подсоединен к выходу запоминающего регистра. Второй вход последнего связан с вторым выходом логического блока, к третьему входу которого подключен выход дополнительного сумматора.
Предлагаемое устройство позволяет автоматически учитывать при автоматическом гидировании телескопом поправки от величины дифференциальных гпутий.
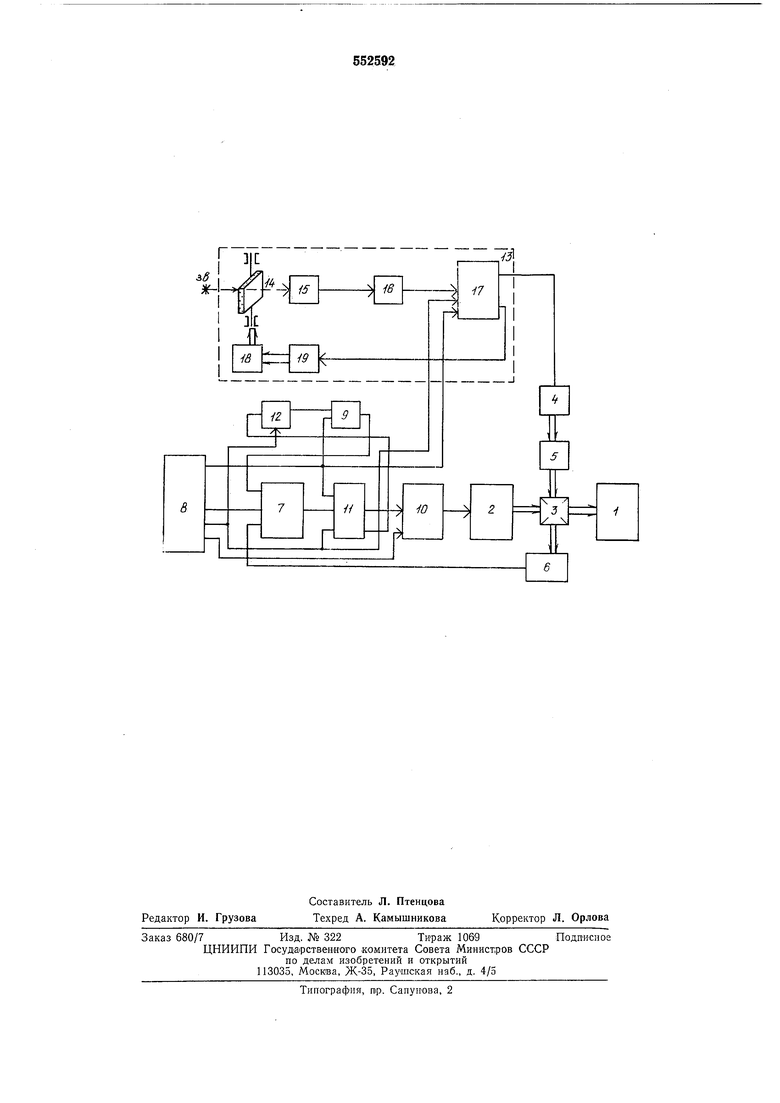
На чертеже представлена .функциональная схема устройства для управления -положением телескопа, который выполнен, например, на альтазимутальной моптировке.
Телескоп 1 может вращаться по зенитному расстоянию (ось Z) цифро-аналоговым приводом 2 через дифференциал 3 и двигателем 4 точной коррекции через редуктор 5. На оси телескопа установлен преобразователь 6 угол- код, электрически связанный с одним из входов дополнительного сумматора 7. Другие его входы подключены соответственно к программному блоку 8 и элементу И 9. Сумматор 10 подсоединен к выходу логического блока 11, запоминающий регистр 12 - к элементу И 9. Гид 13 телескопа содержит укрепленную на телескопе выносную трубу, в окулярной части которой установлена коррекционная пластина 14. Свет звезды (Зв), по которой происходит автоматическое гидирование телескопом, преломляясь через коррекционную пластину, попадает на фотоанализатор 15, с которым через усилитель 16 связан -дополнительный логический блок 17. Пластина 14 -через редуктор 18 кинематически связана с двигателем 19 коррекционной пластины, который подключен к выходу логического блока 17. Другой выход блока 17 подсоединен к двигателю 4.
Наведение телескопа на исследуемый объект происходит следующим образом.
Программный блок формирует на выходе, связанном с вторым входом дополнительного сумматора, код
Zpr.ZH3+8Zr,(1)
где Zas - зенитное расстояние исследуемого
объекта;
6Zr - величина гнутия трубы гида. На третьем выходе программного блока формируется код Z, пропорцио-нальный скорости изменения зенитного расстояния исследуемого объекта.
На -втором выходе устанавливается сигнал «1, соответствующий заданию системе режима «наведение.
На выходе сумматора 7 формируется код рассогласования
Д7г 7р-7ф,(2)
где 2ф - код, считанный с преобразователя 6
угол - код, характериз-ующий фактическое положение телескопа по оси Z.
Код AZ про-пускается логическим блоком 11
па первый выход. Сумматор 10 формирует код,
управляющий цифро-аналоговым приводом 2
в этом режиме
Zy /i,Z + ,(3)
где ki и kz - масштабные коэффициенты. Логический блок 17 отключает двигатели 4 и 19 при поступлении сигнала «наведение. Режим «наведение заканчивается тем, что AZ отрабатывается до допустимой величины и свет гидиро-вочной звезды, проходя через коррекционпую пластину, попадает на центр фотоанализатора 15.
После этого программный блок переводит систему в режим «начальная коррекция гнутий. В этом режиме снимается сигнал «1 с второго выхода программного блока и устанавливается сигнал «Ь па его первом выходе,
а на выходе, связанном с вторым входом дополнительно-го сумматора формируется код
2р-4з + 82г+§ дг,(4)
где бZдг - величина дифференциальных гнутий для текущего значения Z.
Элемент И 9 открывается, но так как за-поминающий регистр 12 был обнулен в режиме наведения, то на выходе сумматора 7 формируется код в соответствии с формулой (2). ТаКИМ образом телескоп, управляемый как и в режиме паведепия, отрабатывает заданное по формуле (4) значение Zp, тем самым осуществляется корректировка положения трубы телескопа на величину , в результате которой исследуемый объект оказывается -на о-птической оси телескопа. Перемещение телескопа на величину 6Zflr вызывает смещение изображения гидировочной звезды с центра фотоанализатора 15. Сигнал, пропорциональный величине этого смещения, усиленный усилителем 16, проходит через логический блок 17 на двигатель 19, который перемещает коррекционную пластину до тех пор, пока свет гидировочной звезды, преломленный коррекционной пластиной, не по-падет на центр фотоанализатора 15.
Когда Выполняется это требование, а также
величина AZ отрабатывается до допустимой
величины, режим «начальная коррекция тнутий закапчивается и система переходит в режим фотогидирования. В этом режиме на -первом и втором выходах программного блока устанавливаются сигналы «О, а на выходе, связанном с входом до-полнительного сумматора 7, значение Zp рассчитывается по-прежнему по формуле (4).
Текущие значения AZ проходят через логический блок 11 и поступают в запоминающий регистр 12. Управление цифро-аналоговым приводом 2 происходит только по скорости 2. Ощибки в положении телескопа воспринимаются фотоанализатором, сигналы которого поступают в этом режиме через логический блок 17 на двигатель 4, который осуществляет коррекцию положения телескопа, при этом отрабатываются инструментальные и другие погрешности, не учитываемые в значении Zp.
Таким образом, величина этих поправок б2т подается -непрерывно в запоминающий регистр 12.
В этом режиме программный блок непрерывно рассчитывает величину текущего значения бZдг и сравнивает ее с величиной dZjif в момент включения режима «начальная коррекция ;гнутий. Как только эта разиость окажется больше заданного значения, величина которого должна быть не менее разрешающей способности по углу преобразователя 6 угол - код, так программный блок переводит систему в режим «коррекция гнутий.
В этом режиме система работает аналогично режиму «начальная коррекция гнутий за исключением того, что значение 8Z на -момент включения этого режима запоминается в запоминающем регистре 12 и начинает поступать через элемент И 9 на вход сумматора 7, тем самым значение AZ на выходе его будет
ЛZ Zp+8Z,-Zф.
Таким образом, телескоп и коррекционная пластина отрабатывают в этом режиме только приращение величины дифференциальных гнутий с учетом поправок, полученных в режиме фототидирования. После того, как телескоп и коррекционная пластина отработают эти величины, система переводится снова в режим фотогидирования, который далее будет прерываться режимом «коррекция гнутий в момент, когда величина дифференциалыных гнутий изменится на заданную величину по сравнению с величиной ее в момент последнего включения этого режима и т. д.
Применение предлагаемого устройства позволяет в режиме автоматического гидирования ошибки в положении крупных и средних телескопов, из-за дифференциальных начальных гнутий, величина которых достигает 20-40, уменьшить ее приблизительно на -порядок. Это
6
соответственно повысит проницающую способность телескопа и его производительность.
Формула изобретения
Устройство для управления положением телескона, содержащее программный блок, первый и второй выходы которого подключены к
первому и второму входам логического блока, первый выход которого подключен к одному входу сумматора, другой вход которого соединен с третьим выходом программного блока, а выход сумматора подключен к цифро-аналоговому приводу, связанному через дифференциал, соединенный с преобразователем угол - код и через редуктор с двигателем точной коррекции, с приводом телескопа, и гид, состоящий из коррекционной пластииы, связанной
через редуктор с двигателем, фотоанализатора, выход которого подключен к входу усилителя, отличающееся тем, что, с целью повышения точности устройства, в него введены дополнительный сумматор, запоминающий
регистр, элемент И и дополнительный логический блок, первый вход которого подключен к выходу усилителя, второй - к второму выходу программного блока, связанному с первым входом запоминающего регистра, третий
вход - к первому выходу программного блока, связанному с первым входом элемента И, а выходы дополнительного логического блока подключены к двигателю точной коррекции и к двигателю коррекционной пластины, первый
вход дополнительного сумматора подключен к выходу преобразователя угол - код, второй вход - к четвертому выходу .программного блока, третий вход - к выходу элемента И, второй вход которого подсоединен к выходу
запоминающего регистра, второй вход которого соединен с вторым выходом логического блока, к третьему входу которого подключен выход дополнительного сумматора.
Источники информации, принятые во внимание при экспертизе;
1.Авт. св. № 161537, кл. G 02В 34/00, 1962.
2.Авт. св. № 431493, кл. G 05В 11/26, 1974.
3.Пеплохов Е. М. и др. Система программаого управления оптическим азимутальным телескопом, «Оптико-механическая промышленность, № 9, 1966.
Г
|С
3,8
)
7jl
17
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления положением телескопа | 1975 |
|
SU681418A1 |
| Система управления телескопом | 1979 |
|
SU924671A1 |
| Система управления телескопом | 1978 |
|
SU805251A1 |
| Система управления телескопом | 1979 |
|
SU826273A1 |
| Устройство для обнаружения и коррекции гнутой трубы телескопа | 1980 |
|
SU970295A1 |
| Устройство для управления телескопом на альтазимутальной монтиолвке | 1974 |
|
SU510691A1 |
| Фотоэлектрическая следящая система гидирования телескопа | 1984 |
|
SU1228068A1 |
| Устройство для управления оптическим телескопом | 1980 |
|
SU941942A1 |
| Система управления телескопом | 1984 |
|
SU1188699A1 |
| Устройство для полуавтоматической коррекции положения азимутального телескопа | 1973 |
|
SU481022A1 |