(54) БЕСКОНТАКТНЫЙ КОМАНДОАППАРАТ

| название | год | авторы | номер документа |
|---|---|---|---|
| Двухканальное устройство для управления технологическим объектом | 1978 |
|
SU723513A1 |
| Бесконтактный командоаппарат | 1978 |
|
SU774968A1 |
| Устройство для компенсации тока однофазного замыкания на землю | 1983 |
|
SU1111225A1 |
| Устройство для управления адаптивным роботом | 1976 |
|
SU704774A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Статистический анализатор | 1982 |
|
SU1136182A1 |
| Электрический преобразователь веса | 1978 |
|
SU717555A1 |
| Машина для контактной стыковой сварки непрерывным оплавлением | 1979 |
|
SU1039668A1 |
| Устройство для программного управления с восстановлением информации | 1988 |
|
SU1603344A1 |
| Устройство для управления вентильным преобразователем | 1984 |
|
SU1205243A2 |
1
Изобретение относится к автоматйескому управлению механизмами и лужит для подачи различных команд по тому или иному исполнительному стройству в зависимости от положения управляющего органа, например ля управления многопозиционными станками, наборными механизмами маркировочных машин, устройств с программным управлением и других машин,.применяемых в металлургии, машиностроении и других отраслях народного хозяйства.
Известны различного рода командоаппараты, в том числе и системы циклового программного управления, в которых по командам, поступающим от тактирующих устройств или от путевых переключателей, производится формирование циклов управления 1.
Недостатками известных систем являются сложность схем построения и необходимость наличия программозадающих устройств для формирования циклов работы оборудования.
Наиболее близким к предлагаемому по технической сущности является бесконтактный командоаппарат станка, содержащий последовательно соединенные генератор импульсов, делитель
частоты, счетчик, дешифратор и блок задания программы 2j.
Однако работа такого командоаппарата ограничена строго фиксированны промежутком времени и числом команд Кроме того, такой командоаппарат
.обеспечивает только последовательность выборки этапов и не может вырабатывать команды для управления в зависимости от угловых перемеще НИИ управляющего органа.
Цель изобретения - расширение области применения устройства.
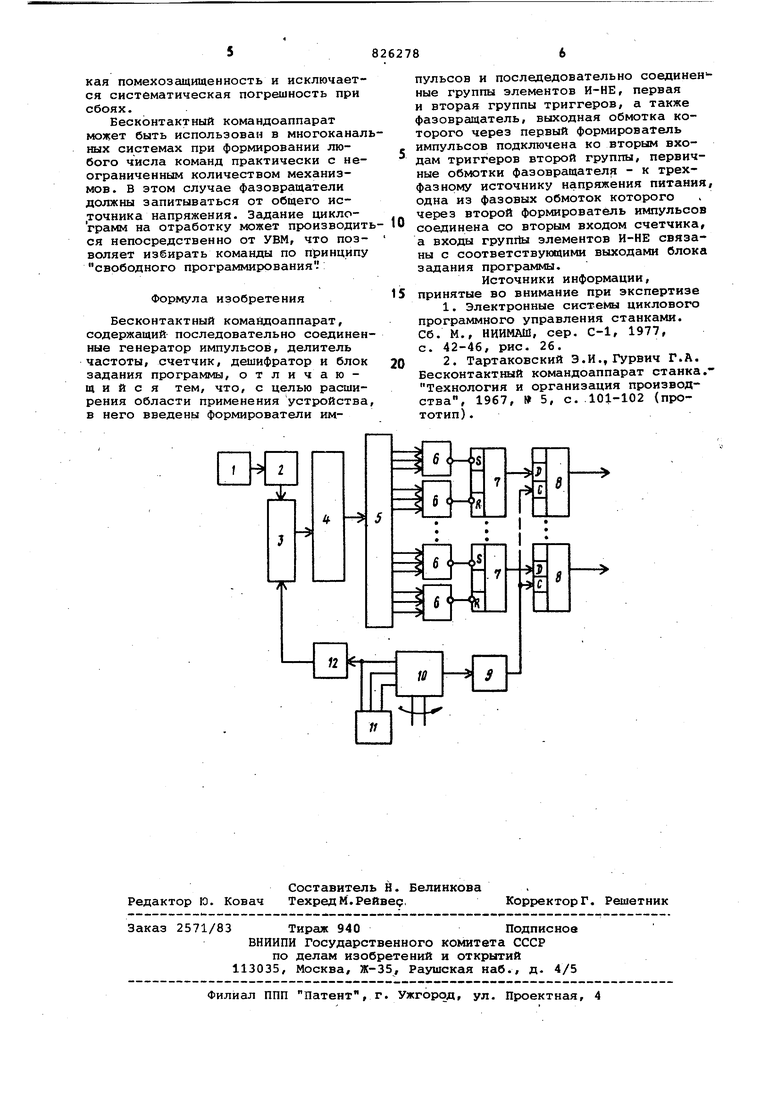
Указанная цель достигается тем, что в предлагаемый командоаппарат введены формирователи импульсов и последовательно соединенные группы элементов И-НЕ, первая и вторая группы триггеров, а также фазовращатель, выходная обмотка которого через первый формирователь импульсов подключена ко вторым входам триггеров второй группы, первичные обмотки фазовращателя - к трехфазному источнику напряжения питания, .одна из фазовых обмоток которого через второй формирователь импульсов соединена со вторым входом счетчика, а входы группы элементов И-НЕ связаны с соответствующими выходами блока задания программы. На чертеже приведена блок-схема бесконтактного командоаппарата. Бесконтакт 1ый командоаппарат содержит последовательно соединенные генератор 1 импульсов, делитель 2 частоты, счетчик 3, дешифратор 4, блок 5- задания программы, х руппу элементов И-НЕ 6, первую и вторую группы триггеров 7 и 8, первый форм рователь 9 импульсов, а также фазовращатель 10, трехфазный источник 11напряжения и второй формировател 12импульсов. Выход генератора 1 импульсов сое динен со входом делителя 2 частоты, выход которого связан со счетным вх дом счетчика 3. По выходам счетчик подключен через дешифратор 4 на вхо блока 5 задания программы, выходы последнего подсоединены на соответствующие входы группы элементов И-Н б. Своими выходами группа элементов И-НЕ б соответственно подключена на S-вход и R-вход первой группы тригг ров 7,выходы которых соединены с со ветствующими D-входами второй групп триггеров 8, а С-входы второй групп триггеров 8 объединены и подключены к выходу первого формирователя 9 импульсов. Ротор фазовращателя 10 кинематически связан с органом управления (не показан). Первичные обмотки фазовращателя 10 подключены к трехфазному источнику 11 напряжения питания. Одно из фазных напряжений этого источника принято за опорное и подключено через второй формирователь 12 на второй вход счетчика 3. Счетчик 3 и дешифратор 4 в предлагаемом командоаппарате могут быть применены типовые. Для отсчета положения в параллельном коде указанные узлы должны быть выполнены подекадно. Это позволяет контроли-. ровать (подтверждать) значение кода через определенный цикл, налример за период следования опорного напря жения, в результате чего повышается надежность. В качестве блока 5 задания программы могут быть использованы микр сх4мы ПУЗ с электрически перепрогр ми уемой информацией или, например,наборное поле программных переключателей и т.п. Бесконтактный командоаппарат работает, следующим образом. Непрерывные сигналы от генератор 1 импульсов поступают на вход делителя 2 частоты, представляющего собой двоичный последовательный счетчик. Коэффициент деления частоты выбран- таким, чтобы величина перемещения органа управления получалась непосредственно в градусах, радианах или других избранных условных единицах. Импульсы с выхода делителя 2 частоты суммируются счетчиком 3. За период следования опорного напряжения в счетчике 3 фиксируется всегда постоянное число. Состояние этого счетчика непрерывно определяется дешифратором 4. С выхода дешифратора 4 последовательность сигналов поступает на входы блока 5 задания программы. С помощью блока 5 задания программы осуществляется установка фиксированных положений органа управления. При фиксации в счетчике 3 числа импульсов, равного значению заданному на .блоке 5, к выходам дешифратора 4 подключаются соответствующие входы группы элементов И-НЕ 6. Группа элементов И-НЕ 6 определяет начало или конец фиксированного положения органа. При отработке начала фиксированного положения срабатывает первая группа триггеров 7. Единичный сигнал последней поступает на соответствующие D-входы второй группы триггеров 8. В момент прихода на С входы второй группы триггеров 8 импульса с первого формирователя 9 соответствующий триггер устанавливается в единичное состояние. Это состояние триггера является началом зоны фиксированного положения органа. Оно сохраняется этим триггером до момента прихода сигнала с выхода группы элементов И-НЕ б о конце зоны положения органа. Нулевой сигнал с выхода группы элементов И-НЕ 6 по R входам первой группы триггеров 7 устанавливает соответствующий триггер в нулевое состояние. При этом соответствующий триггер второй группы триггеров 8 очередным сигналом с первого формирователя 9 импульсов устанавливается в нулевое состояние. С пЬмощью фазовращателя 10 (сельсин или ВТ) определяется положение органа. Первичная обмотка фазовращателя 10 подключена к трехфазному источнику 11 напряжения питания.Одно из фазных напряжений прижимается опорным.Опорное и выходное напряжения в виде сдвинутых по фазе сигналов подаются на входы первого и второго формирователей импульсов 9 и 12, каждый из которых вырабатывает короткий сигнал в виде одиночного импульса, один раз за период в момент перехода переменных напряжений через нулевые значения. Сигналы с выхода второго формирователя 12 импульсов поступают на второй (управляющий) вход счетчика 3. Этими сигналами счетчик 3 обнуляется через каждый период следования опорного напряжения и вновь заполняется импульсами от генератора 1, благодаря чему обеспечивается высокая помехозащищенность и исключает ся систематическая погрешность при сбоях. Бесконтактный командоаппарат может быть использован в многоканал ных системах при формировании любого числа команд практически с не ограниченным количеством механизмов. В этом случае фазовращатели должны запитываться от общего источника напряжения. Задание циклограмм на отработку может производи ся непосредственно от УВМ, что поз воляет избирать команды по принцип свободного программирования . Формула изобретения Бесконтактный комайдоаппарат, содержащий последовательно соединен ные генератор импульсов, делитель частоты, счетчик, дешифратор и блок задания программы, отличающийся тем, что, с целью расширения области применения устройства в него введены формирователи импульсов и последедовательно соединен ные группы элементов И-НЕ, первая и вторая группы триггеров, а также фазовращатель, выходная обмотка которого через первый формирователь импульсов подключена ко вторым входам триггеров вторюй группы, первичные обмотки фазовращателя - к трехфазному источнику напряжения питания, одна из фазовых обмоток которого через второй формирователь импульсов соединена со вторым входом счетчика, а входы групйы элементов И-НЕ связаны с соответствующими выходами блока задания программы. Источники информации, принятые во внимание при экспертизе 1.Электронные системы циклового программного управления станками. Сб. М., НИИМАШ, сер. С-1, 1977, с. 42-46, рис. 26. 2.Тартаковский Э.И., Гурвич Г.А. Бесконтактный командоаппарат станка . Технология и организация производства, 1967, 5, с. .101-102 (прототип) .
