(54) БЕСКОНТАКТНЫЙ КОМАНДОАППАРДТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления прессом | 1980 |
|
SU1055658A1 |
| Устройство цифрового времени | 1986 |
|
SU1377816A2 |
| Бесконтактный командоаппарат | 1984 |
|
SU1245445A1 |
| Бесконтактный командоаппарат | 1978 |
|
SU810529A1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Устройство управления и контроля работы невзрывных импульсных источников сейсмических сигналов | 1986 |
|
SU1408402A1 |
| Устройство для коррекции шкалы времени | 1985 |
|
SU1277413A2 |
| Устройство для спуска и подъема колонны труб | 1979 |
|
SU1134693A1 |
| Устройство для защиты многофазнойэлЕКТРОуСТАНОВКи OT НЕСиММЕТРичНыХРЕжиМОВ РАбОТы | 1979 |
|
SU801173A1 |
| Устройство для акустического каротажа | 1971 |
|
SU443349A1 |
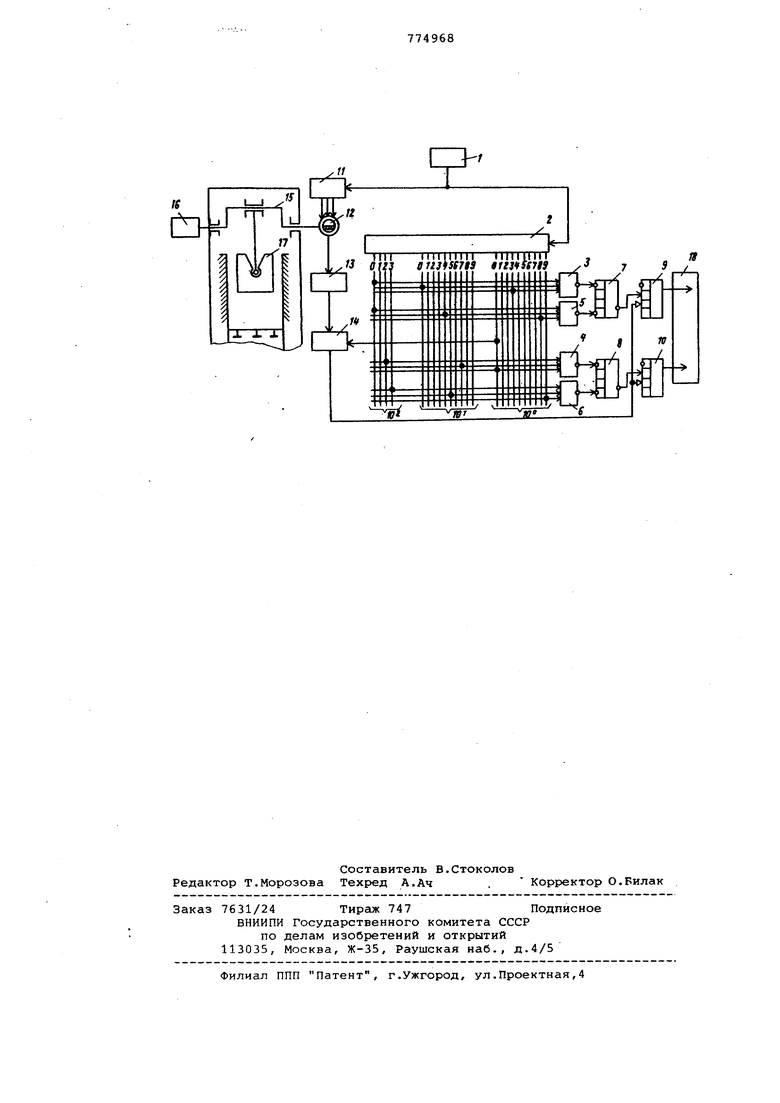
Изобретения относится к области машиностроения, в частности к устрой ствам управления кузнечно-прессовым оборудованием. Известен бесконтактный командоаппарат, содержащий генератор опорной частоты, соединенный с блоком формирования напряжения питания датчика, сочлененно нэ с валом пресса и подключенного к формирователю импульсов а также многоразрядный декадный дели тель частоты, выходы которого соединены через схемы совпадения с триггерами управления, выходы которых подключены к управляющим входам командных триггеров flj . Известному командоаппарату свойственны недостатки, обусловленные недостаточной стабильностью срабатывания и, как следствие этого, ложные срабатывания системы управления прес сом . В целях устранения этого, командо аппарат снабжен блоком квантования фазы сигнала, вход которого подключен к формирователю импульсов и младшему разряду дексщного делителя частоты, а выход - к другим входам коман дных триггеров. На чертеже представлена функциональная схема командоаппарата. Бесконтактный командоаппарат содержит генератор 1 опорной частоты, выход которого соединен с входом многоразрядного делителя 2 частоты, формирующего сигналы циклической развертки десятичного кода с весами , lO, 10. Один из выходов 1 аждой из десятичных декад соединен с трехвходовыми схемами совпадения, две из которых схемы 3 и 4, формируют начало зон, а две другие, схемы 5 и 6 конец зон действия команд. Выходы каждой из схем 3 и 5,,4 и б совпадения начала и конца зоны команд управляют триггерами 7 и 8, соответственно, которые формируют импульсы, синхронизированные частотой генератора 1, а длительностью - пропорциональные зоне действия команды. Один из выходов каждого из триггеров 7 и 8 подключен к управляющим входам соответствующих командных триггеров 9 и 10. Выход генератора 1 опорной частоты также подключен к входу блока 11 формирования напряжения трехфазной системы питания датчика 12. Выход
датчика 12 подключен к входу формирователя 13 импульсов, который ограничивает выходные сигналы датчика до заданного уровня. Выход формирователя 13 соединен с одним из входов блока 14 квантования фазы, к другому входу которого подключен младший десятичный разряд делителя частоты 2 |а выход блока 14 квантования соеди- . йен со вторыми входами схем запуска триггеров 9 и 10.
Датчик 12 соединен с рабочим валом 15, приводимым во вращение от электропривода 16. С эксцентриковым валом 15 кинематически связан ползун 17. Выходы командных триггеров 9 и 1 соединены с системой 18 управления приводом пресса.
Бесконтактный командоаппарат работает следующим образом. ; Электропривод 16 пресса приводит во вращение рабочий вал 15. Вралцательное движение вала 15 преобразуется в возвратно-поступательное движение ползуна 17. С валом 15 соединен датчик 12, который работает в режиме фазовращателя. За полный цикл хода ползуна 17 происходит один оборот датчика 12. Информация об угле поворота вала 15 содержится в фазовом сдвиге между опорным сигналом, который формируется блоком 11 и выходным сигналом датчика 12. Так как в датчике имеется соответствие между механическим углом поворота ротора относительно статора и электрическим фазовьпи сдвигом, то получается линейная зависимость угла поворота вал от фазового сдвига. Работа командоаппарата синхронизирована от генератора 1 опорной частс ты. Он формирует частоту питания датчика 12 и частоту для многоразрядного делителя 2 частоты. Выходной синусоидальный сигнал с выхода датчика 12 поступает на вход формирователя 13 импульсов, который формирует короткий прямоугольный импульс положительной полярности в момент перехода синусоидального сигнала через нуль в сторону положительной полярности. Блок 14 квантования фазы преобразует фазовый сдвиг выходного сигнала формирователя импульсов в дискретный фазовый сдвиг. Благодаря этому устраняется неопределенность границ формирования команд на границе перехода команды при случайных флуктуациях входного сигнала. Сигнал с выхода блока 14 квантования поступает на входы схем запуска командных триггеров 9 и 10.На другие входы этих схем запуска триггеров 9 и 10 поступают временные сигналы с выходов управляющих триггеров 7 и 8, которые синхронизированы в пределах периода питания датчика 12. С этой целью каждая ..из схем 3,4,5 и 6 совпадения соед1 няется с тремя весовыми разрядами многоразрядного делителя частоты 2. Номера выходов декад делителя образуют трехзначное .число, соответствующее границе зоны (начало или конец) ,выраженной в угловых градусах, что позволяет производить оперативное программирование ко эндоаппарата. Сигналы с выхода схем совпадения поступают на установочные входы треггеров 7 и 8, которые обеспечивают временное выделение зоны действия команды в течение периода частоты питания датчика. На триггерах 9 и 10 в течение периода происходит опрос состояния команды.
Статическое состояние этих тригрегов определяет команду в пределах полного оборота датчика.
На приведенной схеме, для примера, показано соединение выходов многоразрядного делителя.2, соответствующее получению команд триггера 9 в пределах 3-48 и триггера 10 в пределах 270-359.
Эффективность использования бесконтактного командоаппарата достигается за счет повышения стабильности его срабатывания, а следовательно, и надежности управления прессом
Формула изобретения
Бесконтактный командоаппарат, содержащий генератор опорной частоты, соединенный с блоком формирования напряжения питания датчика, сочленен ного с валом пресса и подключенного к формирователю импульсов, а также многоразрядный декадный делитель,выходы которого соединены через схемы совпадения с триггерами управления, выходы которых подключены к управляЮГЦИМ входам командных триггеров, отличающийся тем, что, с целью повышения надежности, он снабжен блоком квантования фазы сигнала, вход которого подключен к формирователю импульсов и младшему разряду декадного делителя частоты, а выход - к другим входам командных триггеров.
Источники информации, принятые во внимание при экспертизе
IS
Я
ТТЛ11 и 111111 rrmiirrr
j j
