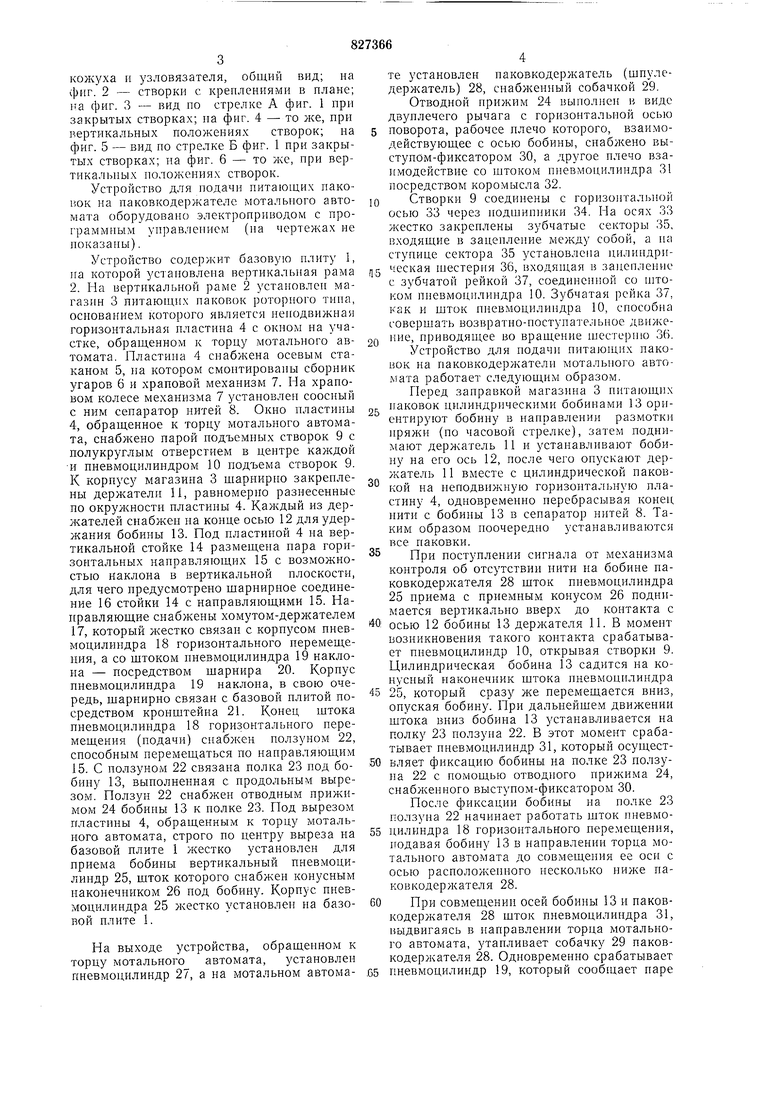
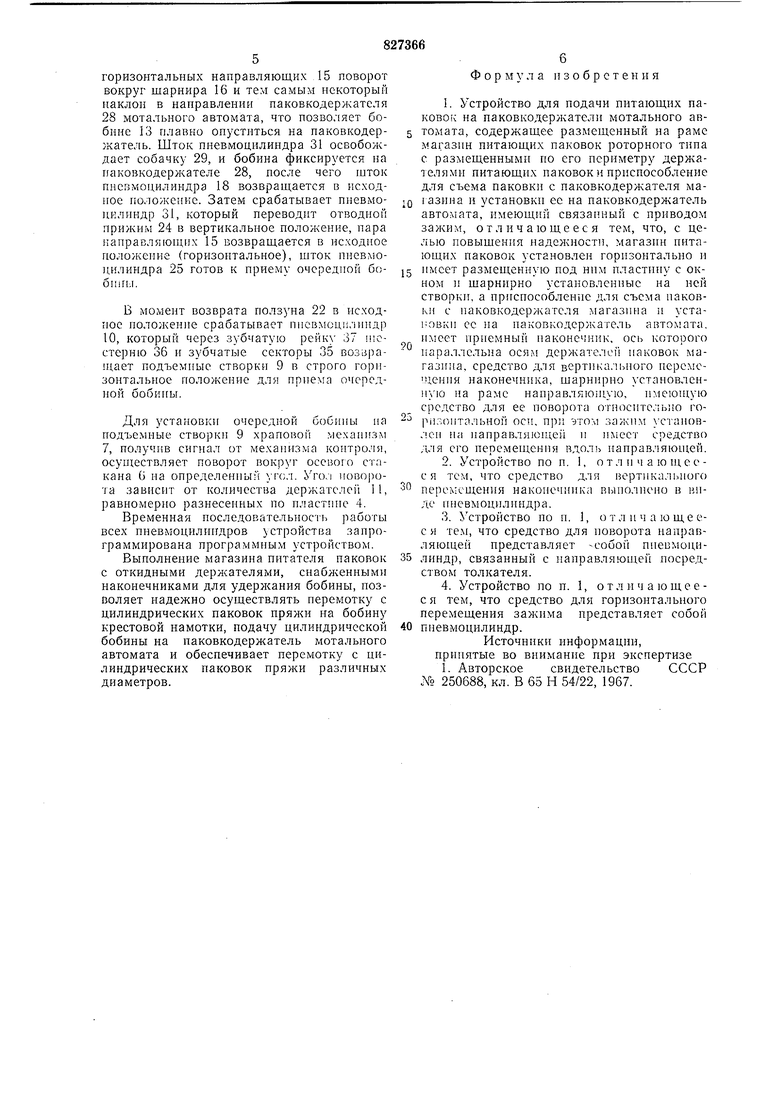
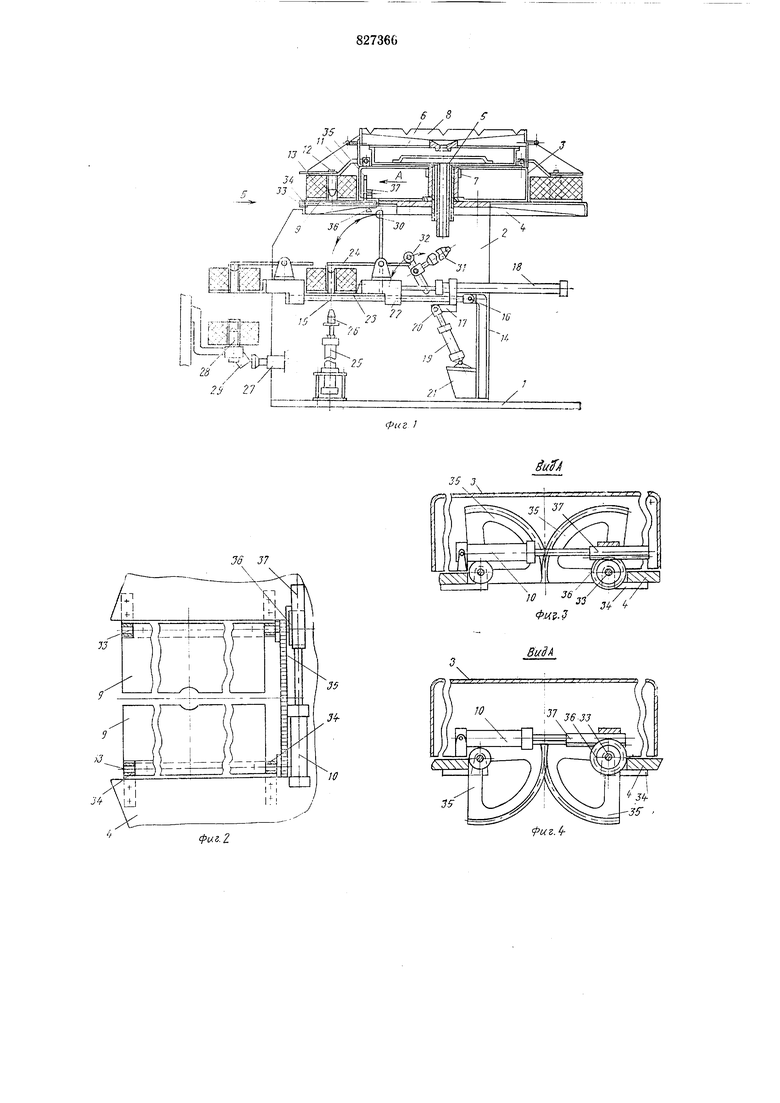
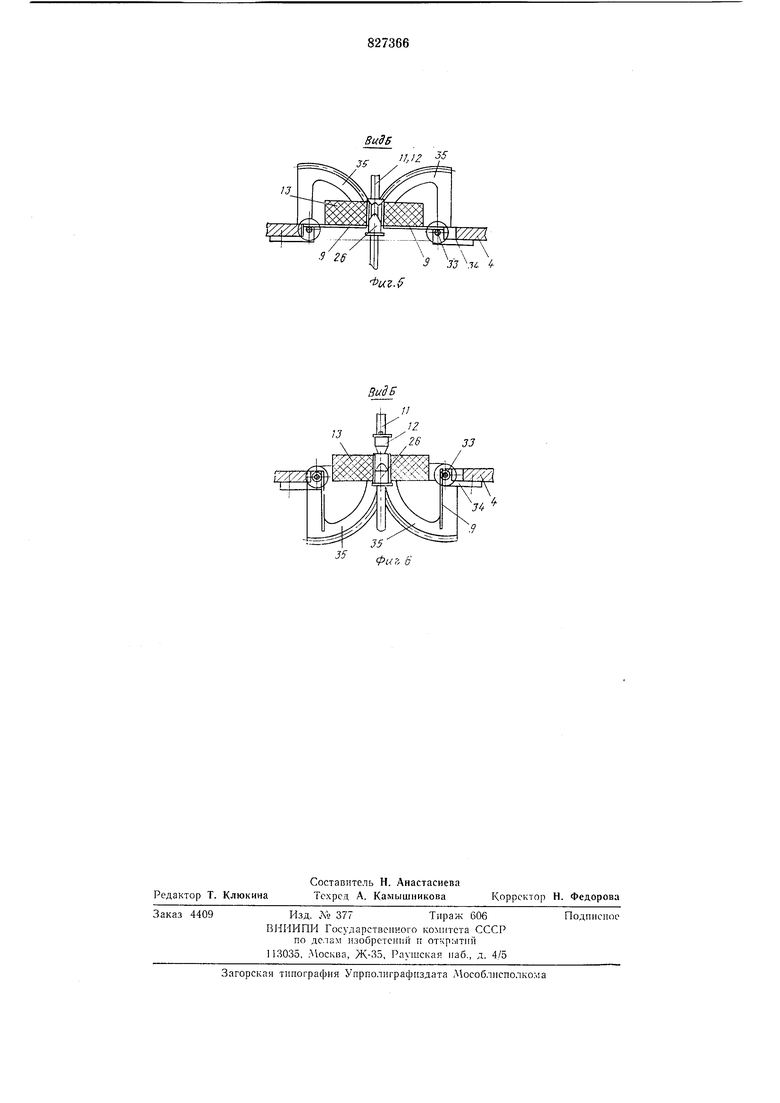
кожуха и узловязателя, общий вид; на фиг. 2 - створки с креплениями в плане; на фиг. 3 - вид ио стрелке А фиг. 1 при закрытых створках; на фиг. 4 - то же, при вертикальных положениях створок; на фиг. 5 - вид по стрелке Б фиг. 1 при закрытых створках; на фиг. 6 - то же, при вертикальных положениях створок.
Устройство для подачи питающих паковок на паковкодержателе мотальпого автомата оборудовано электроприводом с программным управлением (па чертежах не показаны).
Устройство содержит базовую плиту 1, па которой установлена вертикалЕ ная рама 2. На вертикальной раме 2 установлен магазин 3 питающих паковок роторного тина, основанием которого является ненодвижная горизонтальная пластина 4 с окном па участке, обращенном к торпу мотальпого автомата. Пластппа 4 снабжена осевым стаканом 5, на котором смонтированы сборник угаров 6 и храповой механизм 7. На храповом колесе механизма 7 установлен сооспый с пим сепаратор питей 8. Окно пластины 4, обращенное к торцу мотальпого автомата, снабжено парой подъемных створок 9 с полукруглым отверстием в центре каждой и пневмоцплиндром 10 подъема створок 9. К корпусу магазина 3 шарпирно закреплены держатели 11, равномерно разнесенные по окружности пластины 4. Каждый из держателей снабжеп па копце осью 12 для удержания бобины 13. Под пластиной 4 на вертикальной стойке 14 размещена пара горизонтальных нанравляющнх 15 с возможностью наклона в вертикальной плоскости, для чего предусмотрено щарнирпое соединение 16 стойки 14 с направляющими 15. Направляющие снабжены хомутом-держателем 17, который жестко связан с корпусом пневмоцилиндра 18 горизонтального перемещения, а со щтоком пневмоцилиндра 19 наклона - посредством щарнира 20. Корпус ппевмоцилиндра 19 наклона, в свою очередь, щарнирно связан с базовой плитой посредством кронщтейна 21. Конец щтока ппевмоцилиндра 18 горизонтального неремещения (нодачп) снабжеп ползуном 22, способным перемещаться по нанравляющим 15. С ползуном 22 связана полка 23 под бобину 13, выполненная с продольным вырезом. Ползун 22 снабжен отводным прижимом 24 бобины 13 к нолке 23. Под вырезом пластины 4, обращенным к торцу мотального автомата, строго по центру выреза на базовой плите 1 жестко установлен для приема бобипы вертикальный пневмоцилиндр 25, щток которого снабжен конусным наконечником 26 под бобину. Корпус пневмоцплиндра 25 жестко установлен на базовой плите 1.
На выходе устройства, обращенном к торцу мотального автомата, установлен пневмоцилиндр 27, а на мотальном автомате установлен паковкодержатель (щпуледержатель) 28, спабженный собачкой 29.
Отводной прижим 24 выполпеп в виде двуплечего рычага с горизоптальиой осью 5 поворота, рабочее плечо которого, взаимодействующее с осью бобипы, снабжено выступом-фиксатором 30, а другое плечо взаимодействие со щтоком пневмоцилиндра 31 посредством коромысла 32. 10 Створки 9 соедииены с горизо1ггальпой осью 33 через подщипникп 34. На осях 33 жестко закреплены зубчатые секторы 35, входящие в зацеплепие между собой, а иа ступице сектора 35 устаповлена цилиндри(g ческая шестерия 36, входяп ая в заценлепие с зубчатой рейкой 37, соединенной со щтоком ппевмоцплипдра 10. Зубчатая рейка 37, как и щток пневмоцилиидра 10, способна соверщать возвратно-поступательное движе2Q ние, приводяп-1,ее во вращение щестерпю 36. Устройство для подачи питающих паковок па паковкодержателп мотальпого автомата работает следующим образом.
Перед заправкой магазина 3 питающих „г паковок цилиндрическими бобинами 13 ориентируют бобину в направлении размотки иряжи (по часовой стрелке), затем поднимают держатель 11 п устанавливают бобину на его ось 12, после чего опускают держатель И вместе с цилиндрической паковкой па пеподБпжную горизонтальную пластину 4, одповременно перебрасывая конец нити с бобины 13 в сенаратор нптей 8. Такнм образом поочередпо устапавливаются все паковки.
При поступлении сигнала от механизма контроля об отсутствии нити на бобине паковкодержателя 28 щток ппевмоцплиндра 25 приема с приемпым конусом 26 поднимается вертикально вверх до контакта с 0 осью 12 бобипы 13 держателя И. В момент возникновения такого контакта срабатывает пневмоцилиндр 10, открывая створки 9. Цилиндрическая бобина 13 садится на конусный наконечник штока пневмоцилиндра 5 25, который сразу же перемещается вниз, опуская бобину. При дальнейщем движении щтока вниз бобина 13 устанавливается на полку 23 ползупа 22. В этот момент срабатывает нневмоцилипдр 31, который осуществляет фиксацию бобины на полке 23 ползуна 22 с помощью отводного прижима 24, снабженного выступом-фиксатором 30.
После фиксации бобины па полке 23 ползупа 22 начипает работать щток пневмо5 цилиндра 18 горизонтального перемещения, подавая бобину 13 в направлении торца мотальпого автомата до совмещения ее оси с осью расположеппого несколько ниже паковкодержателя 28.
0 Прп совмещении осей бобины 13 и паковкодержателя 28 щток пневмоцилиЕЩра 31, выдвигаясь в направлении торца мотальпого автомата, утапливает собачку 29 паковкодержателя 28. Одновременно срабатывает
5 пневмоцилиндр 19, который сообн ает паре горизонтальных направляющих 15 поворот вокруг шарнира 16 и тем самым некоторый наклон в направлении паковкодержателя 28 мотального автомата, что позволяет бобине 13 плавно опуститься на паковкодержатель. Шток нневмоцнлиндра 31 освобождает собачку 29, и бобина фикснруется на паковкодержателе 28, после чего шток пневмоцилиндра 18 возвращается в исходное положение. Затем срабатывает пиевмопклиндр 31, который переводит отводной прижны 24 в вертикальное положение, пара направля1он;нх 15 возвращается в исходное положеине (горизонтальиое), шток нпевмопилиндра 25 готов к приему очередной бобины. В момент возврата ползуна 22 в нсходное положение срабатывает П11евмоц|;,1индр 10, который через зубчатую рейку 37 incстерню 36 и зубчатые секторы 35 возиращает подъемные створки 9 в строго горизонтальное положение для приема очередной бобины. Для установки очередной бобины на подъемные створки 9 храповой механизм 7, получив сигнал от механизма контроля, осупхествляет поворот вокруг осевого стакана G на определенный угол. Уго.. поворота зависит от количества держателей 11, равномерно разнесенных по пластине 4. Временная последовательность работы всех нневмоцнлнндров устройства запрограммирована программным устройством. Выполнение магазина ннтателя наковок с откнднымн держателями, снабженными наконечниками для удержания бобины, нозволяет надежно осуществлять неремотку с цилиндрических наковок пряжи на бобину крестовой намотки, подачу цилиндрической бобины на наковкодержатель мотального автомата и обеспечивает перемотку с ннлиндрических наковок пряжи различных диаметров. Формула изобретения 1.Устройство для подачи питающих наковок иа паковкодержателп мотального автомата, содержащее размещенный на раме магазнн питающих паковок роторного тнпа с размещеннымп но его пернметру держателямн питающих наковок н нрнснособление для съема наковкн с паковкодержателя магазииа н установки ее на наковкодержатель автомата, нмеющнй связанный с приводом зажим, отличающееся тем, что, с целью повышения надежности, {агазнн нитающих паковок установлен горнзонтально н имеет размещенную нод ннм нлаетниу с окном и шарнирно установленные на ней створки, а прпснособленне для съема паковки с наковкодержателя магазина н установки ее на наковкодержатель автомата, имеет приемный наконечник, ось которого 1 араллелы а осям держателей наковок магазина, средство для вертикального неремецеиия наконечннка, шарнирно установлеи 1 10 на раме нанрав,1яю1цую, имеюн1,ую средство для ее поворота относительно горизоптальной оси, щгл этом зажим устапов,чси иа 11анрав,тяюн, н имеет средство для его перемен1енмя вдоль направляюн1,ей. 2.Устройство но п. 1, о т ,п н ч а ю HI, е е с я тем, что средство для вертикал1)иого нерсмсн 1ення наконечника вынолнеио в нн;vc пневмоцнлнндра, 3.Устройство по п, 1, о т л н ч а ю щ е еся тем, что средство для поворота направляющей представляет -собой нневмонилиндр, связанный с направляюндей посредством толкателя. 4.Устройство но п, 1, о т л и чающееся тем, что средство для горизонтального перемещения зажима представляет собой пневмоцилиндр. Источнпки информацни, принятые во внимание при экспертизе 1, Авторское свидетельство СССР Afb 250688, кл, В 65 Н 54/22, 1967.
35
13
2 27
ff 8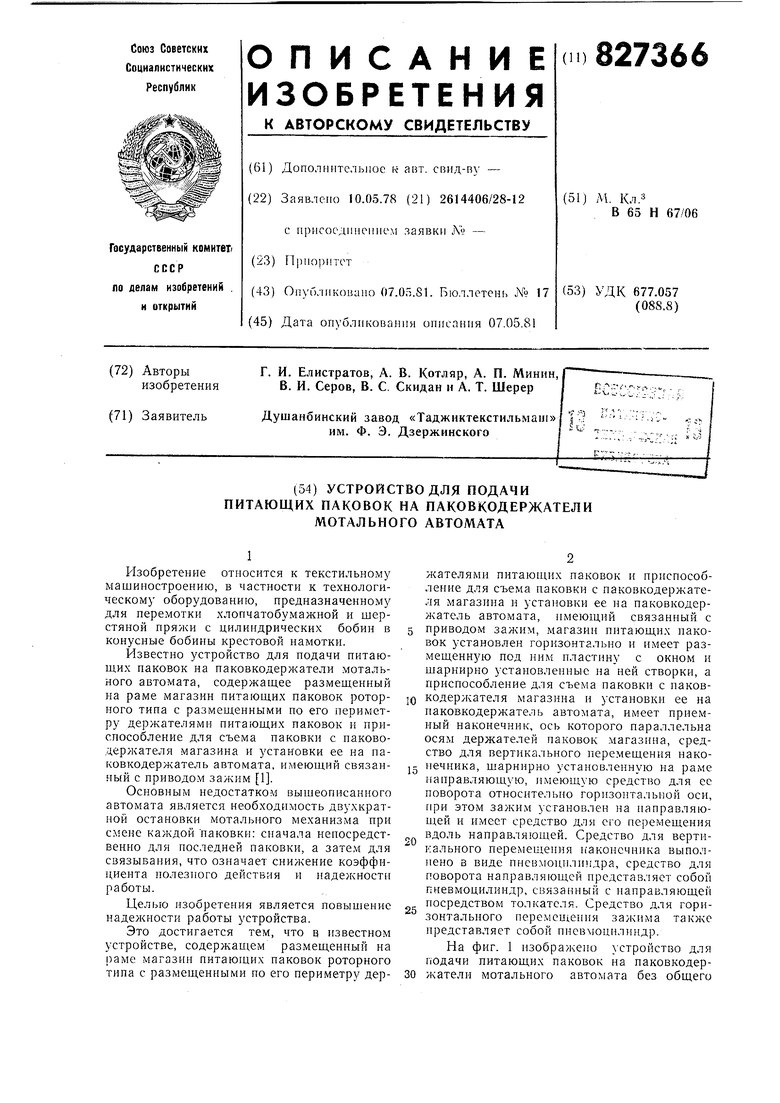
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для замены паковок мотальных машин | 1979 |
|
SU1014795A1 |
| Механизм съема паковок с мотальных машин с двухместными паковкодержателями | 1981 |
|
SU1011482A1 |
| Устройство для перезаправки шпулярника сновальных машин | 1982 |
|
SU1066927A1 |
| Перемоточная машина для наработки стоговидных паковок | 1976 |
|
SU772965A1 |
| Автоматическая мотальная машина | 1978 |
|
SU895868A1 |
| Устройство для съема паковок на текстильной машине | 1990 |
|
SU1776704A1 |
| Устройство для межоперационной передачи паковок текстильных машин | 1979 |
|
SU912618A1 |
| ПРЯДИЛЬНЫЙ АППАРАТ | 1995 |
|
RU2098524C1 |
| Устройство для съема паковок на текстильной машине, преимущественно пневмомеханической прядильной машине | 1990 |
|
SU1784674A1 |
| Устройство для намотки на коническую паковку непрерывно подаваемой пряжи на бескольцевой прядильной машине | 1975 |
|
SU648125A3 |
Jo 37
W
Фм.г
Л
J Фм.З
8идА
J5фиг.
. 26
35
Л, 12. 35
3 4
33
