2. Механизм по п. 1, отличающийся тем, что кинематическая связь ограничителя перемещения сталкивателя паковок с приводом поворота основания включает смонтированный на каретке в опорах горизонтальный вал, на одном конце которого установлен упор, вертикальные стержни, смонтированные на основании по числу держателей наковок, и палец, жестко закрепленный на другом конце вала для поочередного взаимодействия со стрежнями.
3. Механизм по п. 1, отличающийся тем, что упор вала выполнен в виде ролика для контактирования со сталкивателем паковок машины.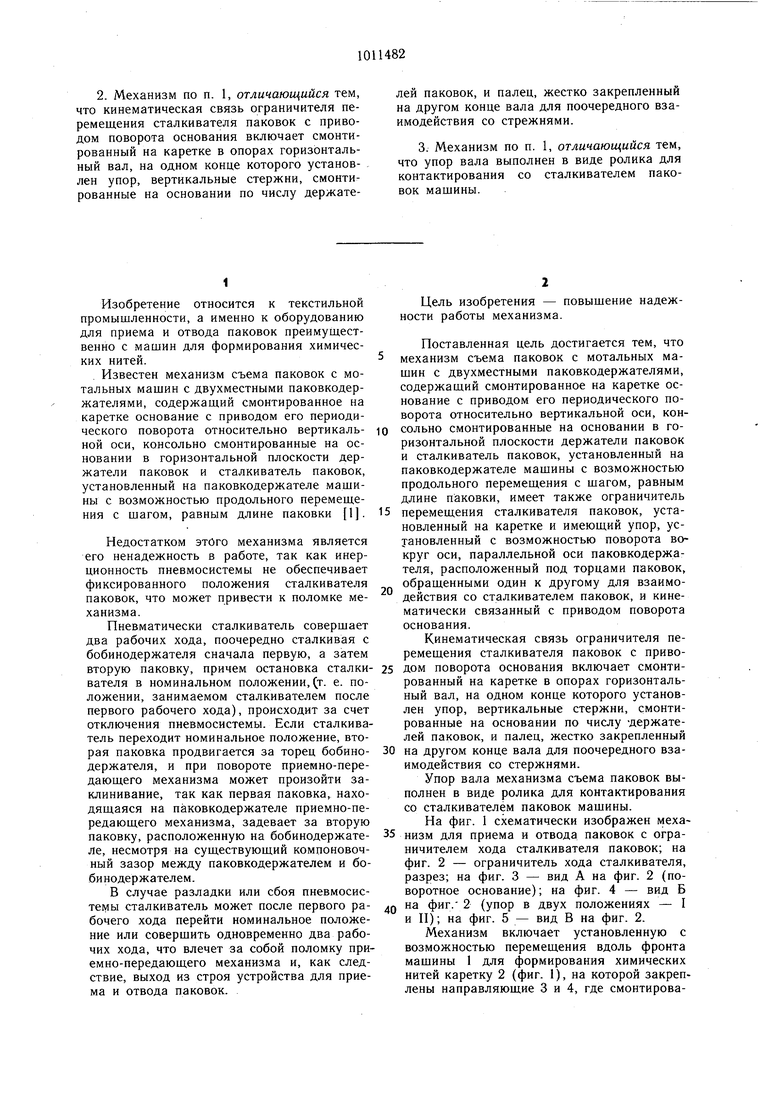
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для приема и отвода паковок от машин формования химических нитей | 1983 |
|
SU1138377A2 |
| Устройство для перегрузки паковок | 1990 |
|
SU1710475A1 |
| Устройство для приема с намоточной машины и перегрузки наработанных паковок на транспортные средства | 1983 |
|
SU1105434A1 |
| Устройство для перегрузки паковок | 1990 |
|
SU1726347A1 |
| Устройство для перегрузки паковок с намоточных машин | 1979 |
|
SU967942A1 |
| Устройство для приема и отвода паковок от машин формования химических нитей | 1978 |
|
SU776982A1 |
| Устройство для замены паковок на машине для намотки длинномерного материала | 1979 |
|
SU950645A1 |
| Мотальная машина | 1980 |
|
SU1030288A1 |
| Устройство для съема паковок на текстильной машине | 1990 |
|
SU1776704A1 |
| Устройство для приема наработанных паковок с намоточной машины и перегрузки их на транспортные средства | 1985 |
|
SU1326531A1 |

1. МЕХАНИЗМ СЪЕМА ПАКОВОК С МОТАЛЬНЫХ МАШИН С ДВУХМЕСТНЫМИ ПАКОВКОДЕРЖАТЕЛЯМИ, содержаший смонтированное на каретке основание с приводом его периодического поворота относительно вертикальной оси, консольно смонтированные на основании в горизонтальной плоскости держатели паковок и сталкиватель паковок, установленный на паковкодержателе машины с возможностью продольного перемешения с шагом, равным длине паковки, отличающийся тем, что € целью повышения надежности его работы, он имеет ограничитель перемещения сталкивателя паковок, установленный на каретке и имеющий упор, установленный с возможностью поворота вокруг оси, параллельной оси паковкодержателя, расположенный под торцами паковок, обращенными один к другому для взаимодействия со сталкивателем паковок, и кинематически связанный с- приводом поворота основания. (Л V 4: 00 ю Фм.1
1
Изобретение относится к текстильной промышленности, а именно к оборудованию для приема и отвода паковок преимущественно с машин для формирования химических нитей.
Известен механизм съема паковок с мотальных машин с двухместными паковкодержателями, содержащий смонтированное на каретке основание с приводом его периодического поворота относительно вертикальной оси, консольно смонтированные на основании в горизонтальной плоскости держатели паковок и сталкиватель паковок, установленный на паковкодержателе машины с возможностью продольного перемещения с шагом, равным длине наковки 1.
Недостатком этого механизма является его ненадежность в работе, так как инерционность пневмосистемы не обеспечивает фиксированного положения сталкивателя паковок, что может привести к поломке механизма.
Пневматически сталкиватель соверщает два рабочих хода, поочередно сталкивая с бобинодержателя сначала первую, а затем вторую паковку, причем остановка сталкивателя в номинальном положении, (т. е. положении, занимаемом сталкивателем после первого рабочего хода), происходит за счет отключения пневмосистемы. Если сталкиватель переходит номинальное положение, вторая паковка продвигается за торец бобинодержателя, и при повороте приенно-передающего механизма может произойти заклинивание, так как первая паковка, находящаяся на паковкодержателе приемно-передающего механизма, задевает за вторую паковку, расположенную на бобинодержатеЛе, несмотря на существующий компоновочный зазор между паковкодержателем и бобинодержателем.
В случае разладки или сбоя пневмосистемы сталкиватель может после первого рабочего хода перейти номинальное положение или соверщить одновременно два рабочих хода, что влечет за собой поломку приемно-передающего механизма и, как следствие, выход из строя устройства для приема и отвода паковок.
Цель изобретения - повыщение надежности работы механизма.
Поставленная цель достигается тем, что
механизм съема паковок с мотальных мащин с двухместными паковкодержателями, содержащий смонтированное на каретке основание с приводом его периодического поворота относительно вертикальной оси, консольно смонтированные на основании в горизонтальной плоскости держатели паковок и сталкиватель паковок, установленный на паковкодержателе мащины с возможностью продольного перемещения с шагом, равным длине паковки, имеет также ограничитель
5 перемещения сталкивателя паковок, установленный на каретке и имеющий упор, установленный с возможностью поворота вокруг оси, параллельной оси паковкодержателя, расположенный под торцами паковок, обращенными один к другому для взаимодействия со сталкивателем паковок, и кинематически связанный с приводом поворота основания.
Кинематическая связь ограничителя перемещения сталкивателя паковок с приводом поворота основания включает смонтированный на каретке в опорах горизонтальный вал, на одном конце которого установлен упор, вертикальные стержни, смонтированные на основании по числу -держателей паковок, и палец, жестко закрепленный
0 на другом конце вала для поочередного взаимодействия со стержнями.
Упор вала механизма съема паковок выполнен в виде ролика для контактирования со сталкивателем паковок мащины.
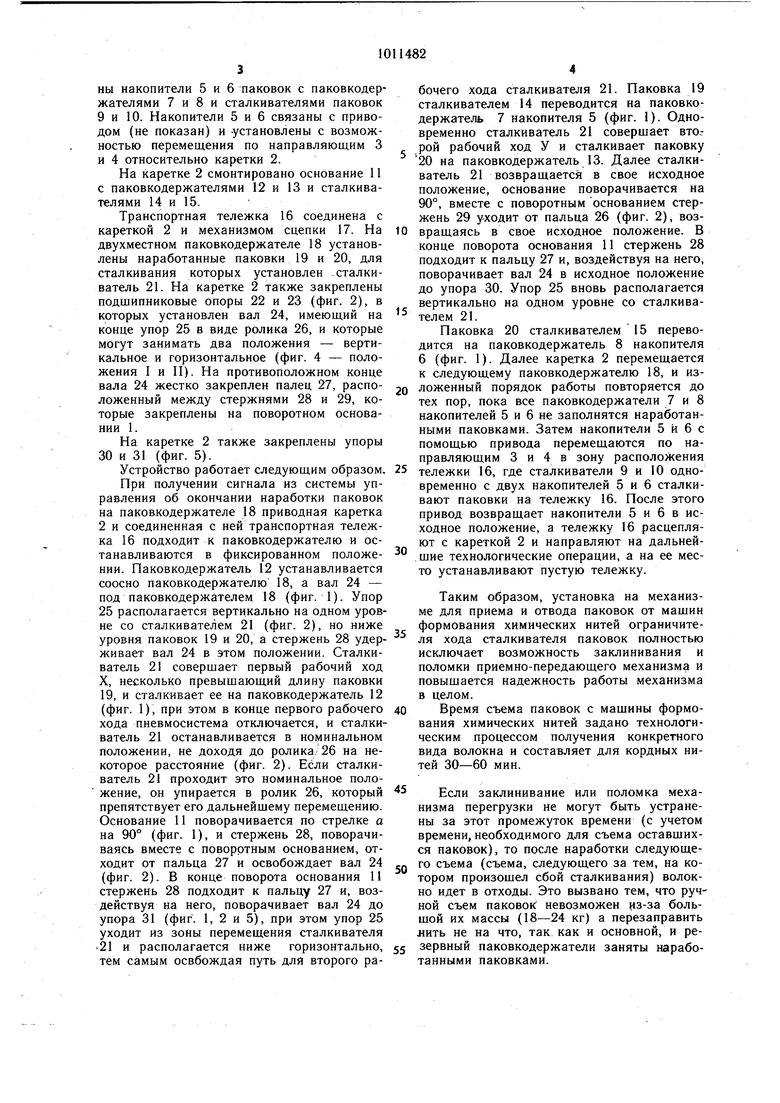
На фиг. 1 схематически изображен Niexa5 низм для приема и отвода паковок с ограничителем хода сталкивателя паковок; на фиг. 2 - ограничитель хода сталкивателя, разрез; на фиг. 3 - вид А на фиг. 2 (поворотное основание); на фиг. 4 - вид Б
0 на фиг. 2 {упор в двух положениях - I и II); на фиг. 5 - вид В на фиг. 2.
Механизм включает установленную с возможностью перемещения вдоль фронта машины 1 для формирования химических нитей каретку 2 (фиг. 1), на которой закреплены направляющие 3 и 4, где смонтированы накопители 5 и 6 паковок с паковкодержателями 7 и 8 и сталкивателями паковок 9 и 10. Накопители 5 и б связаны с приводом (не показан) и -установлены с возможностью перемещения по направляющим 3 и 4 относительно каретки 2.
На каретке 2 смонтировано основание 11 с паковкодержателями 12 и 13 и сталкивателями 14 и 15.
Транспортная тележка 16 соединена с кареткой 2 и механизмом сцепки 17. На двухместном паковкодержателе 18 установлены наработанные паковки 19 и 20, для сталкивания которых установлен сталкиватель 21. На каретке 2 также закреплены подщипниковые опоры 22 и 23 (фиг. 2), в которых установлен вал 24, имеющий на конце упор 25 в виде ролика 26, и которые могут занимать два положения - вертикальное и горизонтальное (фиг. 4 - положения I и II). На противоположном конце вала 24 жестко закреплен палец 27, расположенный между стержнями 28 и 29, которые закреплены на поворотном основании 1.
На каретке 2 также закреплены упоры 30 и 31 (фиг. 5).
Устройство работает следующим образом.
При получении сигнала из системы управления об окончании наработки паковок на паковкодержателе 18 приводная каретка 2 и соединенная с ней транспортная тележка 16 подходит к паковкодержателю и останавливаются в фиксированном положении. Паковкодержатель 12 устанавливается соосно паковкодержателю 18, а вал 24 - под паковкодержателем 18 (фиг. 1). Упор 25 располагается вертикально на одном уровне со сталкивателем 21 (фиг. 2), но ниже уровня паковок 19 и 20, а стержень 28 удерживает вал 24 в этом положении. Сталкиватель 21 совершает первый рабочий ход X, несколько превыщающий длину паковки 19, и сталкивает ее на паковкодержатель 12 (фиг. 1), при этом в конце первого рабочего хода пневмосистема отключается, и сталкиватель 21 останавливается в номинальном положении, не доходя до ролика 26 на некоторое расстояние (фиг. 2). Если сталкиватель 21 проходит это номинальное положение, он упирается в ролик 26, который препятствует его дальнейшему перемещению. Основание 11 поворачивается по стрелке а на 90° (фиг. 1), и стержень 28, поворачиваясь вместе с поворотным основанием, отходит от пальца 27 и освобождает вал 24 (фиг. 2). В конце поворота основания 11 стержень 28 подходит к пальцу 27 и, воздействуя на него, поворачивает вал 24 до упора 31 (фиг . 1, 2 и 5), при этом упор 25 уходит из зоны перемещения сталкивателя 21 и располагается ниже горизонтально, тем самым освбождая путь для второго рабочего хода сталкивателя 21. Паковка 19 сталкивателем 14 переводится на паковкодержатель 7 накопителя 5 (фиг. 1). Одновременно сталкиватель 21 соверщает второй рабочий ход У и сталкивает паковку 20 на паковкодержатель 13. Далее сталкиватель 21 возвращается в свое исходное положение, основание поворачивается на 90°, вместе с поворотным основанием стержень 29 уходит от пальца 26 (фиг. 2), возвращаясь в свое исходное положение. В конце поворота основания 11 стержень 28 подходит к пальцу 27 и, воздействуя на него, поворачивает вал 24 в исходное положение до упора 30. Упор 25 вновь располагается вертикально на одном уровне со сталкива телем 21.
Паковка 20 сталкивателем 15 переводится на паковкодержатель 8 накопителя 6 (фиг. 1). Далее каретка 2 перемещается к следующему паковкодержателю 18, и изложенный порядок работы повторяется до тех пор, пока все паковкодержатели 7 и 8 накопителей 5 и 6 не заполнятся наработанными паковками. Затем накопители 5 и 6 с помощью привода перемещаются по направляющим 3 и 4 в зону расположения
тележки 16, где сталкиватели 9 и 10 одновременно с двух накопителей 5 и 6 сталкивают паковки на тележку 16. После этого привод возвращает накопители 5 и 6 в исходное положение, а тележку 16 расцепляют с кареткой 2 и направляют на дальнейщие технологические операции, а на ее место устанавливают пустую тележку.
Таким образом, установка на механизме для приема и отвода паковок от мащин формования химических нитей ограничителя хода сталкивателя паковок полностью исключает возможность заклинивания и поломки приемно-передающего механизма и повышается надежность работы механизма в целом.
0 Время съема паковок с машины формования химических нитей задано технологическим процессом получения конкретного вида волокна и составляет для кордных нитей 30-60 мин.
Если заклинивание или поломка механизма перегрузки не могут быть устранены за этот промежуток времени (с учетом времени, необходимого для съема оставшихся наковок), то после наработки следующеQ го съема (съема, следующего за тем, на котором произошел сбой сталкивания) волокно идет в отходы. Это вызвано тем, что ручной съем паковок невозможен из-за большой их массы (18-24 кг) а перезаправить лить не на что, так как и основной, и резервный паковкодержатели заняты наработанными паковками.
Вид А
Фиг.Е
В ид б
28Фиг.
Вид в
Фи&.5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для приема и отвода паковок от машин формования химических нитей | 1978 |
|
SU776982A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
