(54) СПОСОБ ИЗМЕРЕНИЯ РАСХОДА ВОДЫ В РЕКЕ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения расхода воды в реке | 1984 |
|
SU1283531A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАСХОДА ВОДЫ В РЕКЕ С ДВИЖУЩЕГОСЯ СУДНА | 1992 |
|
RU2045002C1 |
| Устройство для измерения расхода воды в реке | 1980 |
|
SU903705A1 |
| Ультразвуковой способ измерения скорости течения и расхода воды в открытых водоемах | 2016 |
|
RU2664456C2 |
| Способ определения пространственного положения трубопровода на участке подводного перехода | 2021 |
|
RU2786847C2 |
| Устройство для автоматической регистрации графика глубин | 1948 |
|
SU78097A1 |
| СПУТНИКОВЫЙ РЕЧНОЙ КОМПАС | 2009 |
|
RU2411451C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДОВ | 2005 |
|
RU2277495C1 |
| АВТОРУЛЕВОЙ СУДНА | 2011 |
|
RU2465170C1 |
| СПОСОБ ПРОКЛАДКИ МОРСКИХ ПОДВОДНЫХ КАБЕЛЕЙ | 2010 |
|
RU2444827C1 |
1
Изобретение относится к гидрометрии и может быть использовано для измерения расхода воды средних и больших рек с движущегося судна.
Известен способ 1 измерения расхода воды в реке с движущегося от берега к берегу судна, заключающийся в том, что судно направляют поперек реки, поперечное сечение которой делят на ряд отсеков, измеряют длину каждого отсека, на границах каждого из отсеков производят постановку судна на якорь, в месте постановки судна измеряют глубину реки и среднюю скорость потока, а искомый расход воды вычисляют по формуле
. , О)
гпр .-/Vt- V/t VbL- bUA, . где д- Д yte,
Q - полный расход воды; j. - расход воды в отсеке; м, -число отсеков; (1 - расстояние между соседними вертикалями (длины отсека); -глубина реки на вертикалях по обеим границам отсека;
i. nVi+i -средние скорости течения реки на вертикалях по обеим границам отсека.
Недостатком известного способа является его низкая точность, обусловленная наличием погрешностей вождения судна по створной линии и неравномерностью распределения скоростей течения потока по щирине отсека.
Наиболее близким техническим рещением к изобретению является способ измерения расхода воды в реке с движущегося от бе0рега к берегу судна, включающий непрерывные измерения глубины реки, полного времени движения судна, равнодействующей векторов скорости течения и скорости движения судна, а также угла между направле5нием равнодействующей и произвольной осью Л системы отсчета с началом координат в точке начала движения судна. При этом способе судно непрерывно ведут по створной линии, предварительно размеченной на отсеки, в которы.х измеряют средние значения названных параметров, а расход определяют по формуле .
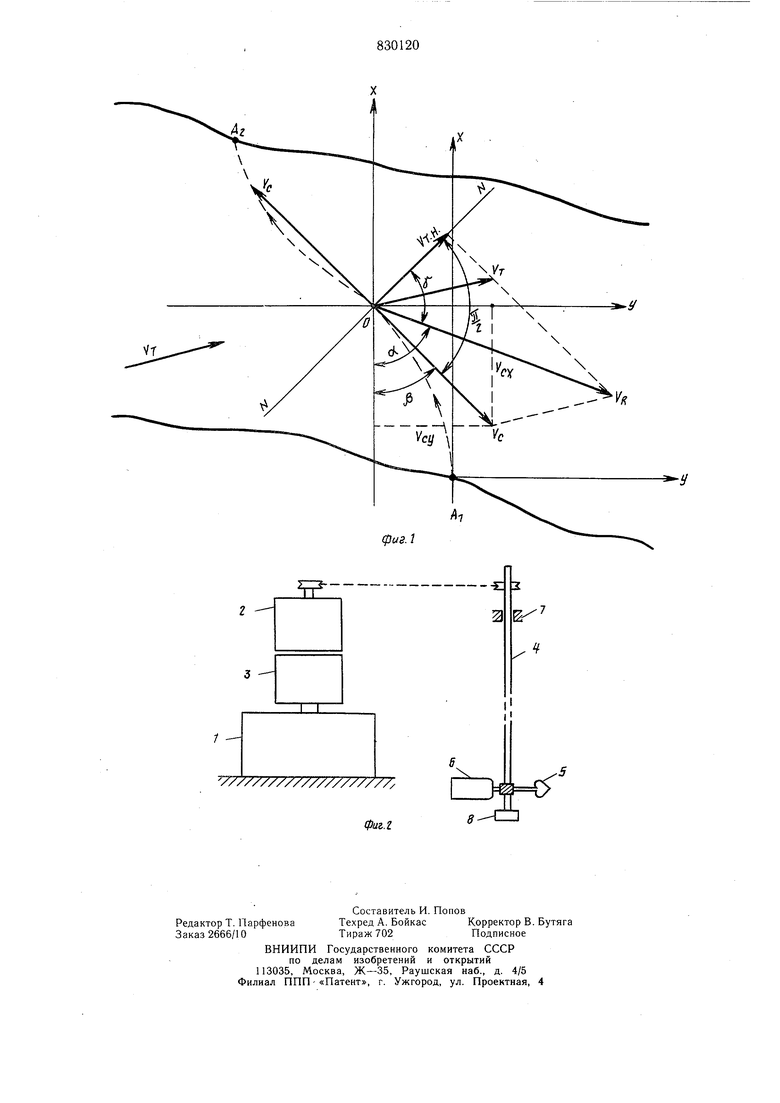
где .-VHTfHi-ti; 0 - расход воды в отсеке поперечного сечения, измеренный по поверхностной скорости; Vf-V . пределах отсека скорость судна, вычисленная по измерениям на границах от сека;( пределах отсека поверхностная скорость течения реки, нормальная к створной линии, вычисленная по измерениям на границах отсека; -осредиенная в пределах отсека глубина потока; ij - время, в течение которого судно проходит от одной границы отсека до другой; -коэффициент перехода от расхода, измеренного по поверхностной скорости, к истинному. Таким образом, общий расход Q получают суммированием расходов в отдельных отсеках. При измерении расхода воды этим способом отпадает необходимость в постановке судна на границах отсеков 2. Однако при этом способе гидрометрическое судно необходимо перемещать строго по створной линии, что и составляет источник погрешностей измерений. Кроме того, к недостаткам известного способа следует отнести и дискретность измерений, производимых в отсеках, а также необходимость оборудования участка реки специальными створ ными знаками, условия хорошей видимости которых определяют пределы применимости способа. Цель изобретения - повышение точности измерения расхода воды в реке и упрощение процесса. Поставленная цель достигается тем, что в способе измерения расхода воды в реке с движущегося от берега к берегу судна, включающем непрерывные измерения глубины реки, полного времени движения судна, равнодействующей векторов скорости течения и скорости движения судна, а также угла между направлением равнодействующей и произвольной осью X системы отсчета с началом координат в точке начала движения судна. Судно от берега к берегу ведут по произвольной траектории, и дополнительно непрерывно измеряют проекции вектора скорости судна на ось X и перпендикулярную ей ось У, а расход воды определяют по формуле .H-ctt , V tlVHTгде Ц расход воды в -расход воды в реке; -время измерения расхода воды (т.е. время движения судна; ( скорость судна, VtxjVtv-компоненты скорости судна; ((-Cost -скорость течения, нормальная +arct§ -ci к траектории движения судна; Vj - равнодействующая скоростей течения реки и движения судна угол между направлением равнодействующей Уц и осью X; Н - глубина реки; К -коэффициент перехода от расхода, измеренного по поверхностной скорости, к истинному расходу. На фиг. 1 показан участок реки с произвольной траекторией движущегося по ней судна и векторной диаграммой скоростей судна и воды в произвольной точке нахождения судна, в плане ( arettf - угол м.ежду вектором скорости судна и осью Х- | arctg| -. угол между вектором равнодействующей и вектором скорости, нормальной,к траектории движения судна; - угол между нормалью и касательной;М- М - направление нормали к траектории движения судна; на фиг. 2 - датчики, обеспечивающие измерение и выдачу первичных данных для вычисления расхода воды, а также кинематические связи между этими датчиками. Измерение расхода по данному способу производят, направляя судно с измерительной аппаратурой (датчиками) по произвольной траектории из точки A-f ъ точку Л 4. При этом непрерывно измеряют на ходу судна глубину Н реки, время Т движения судна по траектории A., равнодействующую скоростей течения реки и движеная судна VR, угол о( между направлением равнодействующей и произвольной осью X, выходящей из точки А J начала движения судна у одного из берегов, а также проекции вектора скорости судна на ось X и ей перпендикулярную ось у, т.е. ( и Vty). Устройство содержит гироскоп 1, стабилизирующий положение площадки, на которой установлен преобразователь 2 угла поворота и датчик 3 компонент и Vcy скорости судна. Преобразователь 2 угла кинематически связан со штангой 4, на противоположном конце которой закреплен датчик 5 с лопастью 6 гидрофлюгера, предназначенные для измерения равнодействующей V скоростей течения реки и движения судна. Штанга 4 зафиксирована в подшипнике 7. На том же конце штанги 4 установлен датчик 8 глубины (например, вибратор эхолота). Измерение расхода воды в реке производят в следующей последовательности. Перед началом измерения в точке А, (см. фиг. 1 и фиг. 2) включается питание аппаратуры и запускается гироскоп 1, стабилизирующий положение площадки, на которой установлен преобразователь (например, потенциометр) 2, измеряющий угол, и датчик 3 (например, двухкомпонентный акселерометр), предназначенный для регистрации компонент VCJQ и Vcy скорости судна. Затем производится разворот площадки так, чтобы акселерометр, фиксирующий Vc, был ориентирован в сторону противоположного берега реки, т.е. задается направление оси X. После этого поворачивают щтангу 4 в положение, при котором лопасть 6 гидрофлюгера окажется совмещенной с осью X. Если при этом выходной сигнал потенциометра отличается от нуля, то корпус потенциометра плавно вращают относительно стабилирующей площадки и закрепляют в положении, при котором выходной сигнал равен нулю. После включения эхолота и появления записи глубины на его батиграмме начинается процесс измерения расхода воды. Судно отходит от берега и, достигнув глубины, обеспечивающей работу эхолота (0,5-0.7 м), перемещается по произвольной траектории A,AZ, в сторону противоположного берега. Ориентированный гироскопом по направлению осей X и У интегрирующий акселерометр 3 непрерывно, начиная с момента начала двиг жения судна, выдает информацию о величине и знаке компонентов скорости судна УСХ.И VCY . Лопасть 6 гидрофлюгера с.датчиком 5 скорости устанавливается в процессе движения по направлению равнодействующей V( скоростей течения реки и потока, возникающего при движении судна, и образует с осью X угол , который преобразуется в потенциометре 2 в электрический сигнал.
Сигналы с потенциометра 2, датчиков 3, 5 и 8 поступают в вычислительное устройство (не показано), производящее обработку информации, интегрирование по формуле (1) и выдачу результата на цифровой индикатор. Задачей оператора непосредственно при измерении расхода воды является только контроль за работой аппаратуры и оборудования в процессе движения судна и снятие показаний с цифрового индикатора по окончании рабочего галса.
Формула изобретения Способ измеренкя расхода воды в реке с движущегося от берега к берегу судна, включающий непрерывные измерения глубины реки, времени движения судна, равнодействующей векторов скорости течения и скорости движения судна, а также углу между направлением равнодействующей и произвольной осью X система отсчета с началом координат в точке -начала движения судна, отличающийся тем, что, с целью
О повыщения точности измерения и упрощения процесса, судно от берега к берегу ведут по произвольной траектории, дополнительно непрерывно измеряют проекции вектора скорости судна на ось X и перпендикулярную
5 ей ось У, а расход воды определяют по 9 кЛс-Унт.н.11,
о
где d -расход воды в реке;
-время измерения расхода воды; cxiYcj -компоненты скорости судна;
0,„
Vc VeJ+Vty - -скорость судна;
YrtT VnCosES- - -скорость течения, нормальная
траектории движения судна; Yj равнодействующая скоростей 5течения реки и движения судна.
оС -угол между направлением равнодействующей Vj и осью X; Н - глубина реки; К. - коэффициент перехода от расхода, измеренного по поверх ностной скорости, к истинному расходу.
Источники информации, принятые во внимание при экспертизе
1978, вып. 6, часть 1, с. 145-146.
0 survey. 1969. Ach. 11, B. 3 p, 1-22 (прототип).
фиг.1
