ной информации обусловлены колебаниями содержания магнитной фракции в готовом агломерате. Необходимость устранения основного источника помех, обусловленного колебаниями минералогического состава го тового агломерата,особенно возрастает в связи с использованием измеряемого сигнала для управления приводом сис темы регулирования процесса спекани В числе других помех при проведении магнитных измерений индуктивнЕзШи и индукционными датчиками известных конструкций существенное влияние на результаты измерений оказывают к лебания величины зазора между датчиком и поверхностью спекаемого материала, а также большие перепады температуры воздуха у поверхности агломерата. Известен способ, основанный на применении пермагната - прибора дл измерения магнитной проницаемости проб готового агломерата, отбираемых под.горячим грохотом, и затем охлаждаемых. По величине измеренно магнитной проницаемости судят об отклонениях от ее заданного значен соответствующего оптимальным уровн ряда технологических параметров, в частности - о содержании магнетита прочности и восстановимости агломерата 2 . Недостатком измерений магнитной проницаемости по способу пермагнат является низкая оперативность полу чения информации, связанная с отбо и подготовкой проб, из чего-вытека также и низкая представительность способа. .Наиболее близким к предлагаемом является магнитоиндукционный метод измерений магнитной восприимчивости горных пород и руд, представлен ный плоской поверхностью. В данном способе применяется двухкатушечный датчик магнитной восприимчивости, содержащий намагничивающую (генера торную) и приемную катуцтки, -размещенные у исследуемой поверхности н одном и том же расстоянии от нее. Величина ЭДС индукции приемной катушки определяется следующим выражениемЕ ЕО( ( где Е - ЭДС приемной катушки в воз духе ; G - функция координат внешней точки, выражаемая в систем координат, согласованной со структурой поля, намагниченного полем генераторной катушки объектива, называемая также геометричес ким фактором датчика; N - размагничивающий фактор или коэффициент размагничи вания исследуемого объекта Эе магнитная восприимчивость материала исследуемого объекта. Как известно, коэффициент размагничивания N для плоского бесконечного полупространства равен 2ff независимо от значений Эе материала и геометрии измерений. Геометрический фактор G при измерениях на поверхности плоского бесконечного полупространства является только функцией отношения расстояния d от датчика до поверхности к длине датчика L и при фиксированных d, 16-фактор приобретает смысл постоянной датчика. При размещении обоих катушек датчика на поверхности бесконечнох-О полупространства при значение G-фактора приближается к своему предельному значению, равному 2ic . в реальных условиях понятие бесконечного полупространства является правомерным и при измерениях на поверхности слоя конечной мощности, когда мощность слоя превышает глубину исследования двухкатушечного датчика, называемую также слоем насыщения. Как известно, глубина исследования индукционного датчика магнитной восприимчивости при фиксированном расстоянии d определяется исключительно длиной датчика L, она тем больше, чем больше L, причем мощность слоя насьяцения составляет около 0,8 L з. Однако при изменении мощности слоя от слоя насыщения до слоя бесконечно малой мощности ЭДС приемной катушки уменьшается до нуля поскольку, как это следует из выражения (1), геометрический фактор приближается к своему предельному значению, равному нулю. В то же время коэффициент размагничивания N монотонно изменяется в пределах (2-4)ПГ, Вследствие этого, измерения магнитной восприимчивости на плоской поверхности возможны лишь при мощности слоя, превышающей мощность слоя насыщения, при условии стабилизации геометрического фактора путем обеспечения постоянства величин d и LO Поэтому при определении Зе. в случае слоя конечной мощности расстояние между приемной и намагничивающей катушками L должно быть выбрано меньше мощности слоя, для того, чтобы последний обладал свойство1ми слоя насыщения. С другой стороны, из изложенного следует, что при использовании способа для определения мощности слоя готового агломерата информативными величинами являются факторы G и N, при этом влияние изменений магнитной восприимчивости агломерата, обусловленное колебаниями содержаний магнитной фракции в нем, должно, быть устранено. Сравнительный анализ способов показывает, что Основное преимущество
последнего состоит в принципиальной возможности обеспечения любой заданной глубины исследования, причем в случае насыщенного слоя может быть определена истинная магнитная восприимчивость материала, из которого выполнен слой, а для слоя конечной мощности, меньшей мощности насыщенного слоя, при Зе const сигнал измерительной информации характеризует мощность слоя.
Цель изобретения - повышение точности определения вертикальной скорости спекания железорудной шихты в агломерат.
Поставленная цель) достигается тем, что измерения выполняют одновременно двумя датчиками, одним из которых измеряют кажущуюся магнитную восприимчивость агломерата над термонемагнитным слоем, образованным значениями температуры, равными точкам Кюри магнитной функции спекаемого материала, а другим всего слоя материала, включая агломерат, термонемагнитный слой и исходную шихту, на выходах датчиков в процессе спекания шихты измеряют значения сигналов и определяют их относительные приращения -к значениям начальных сигналов, получеиных ПРИ полном спекании шихты в агломерат на полную глубину слоя материала, и по обратному значению р.азности этих приращений судят о скорости спекания шихты.
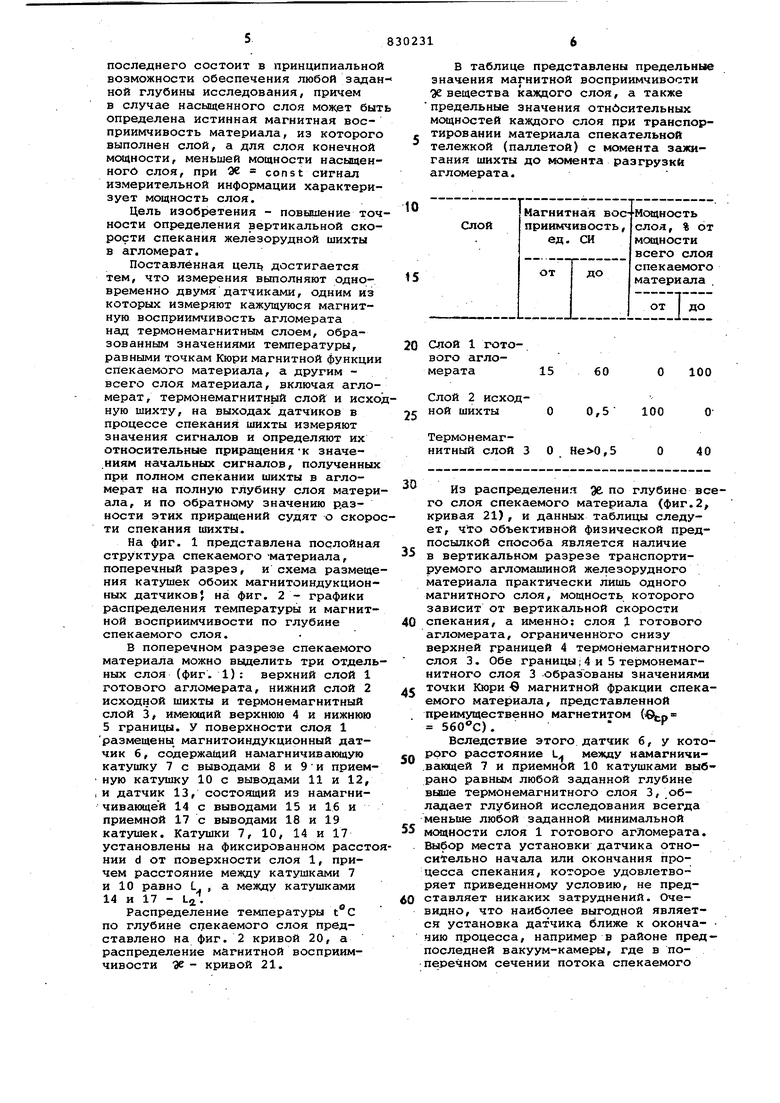
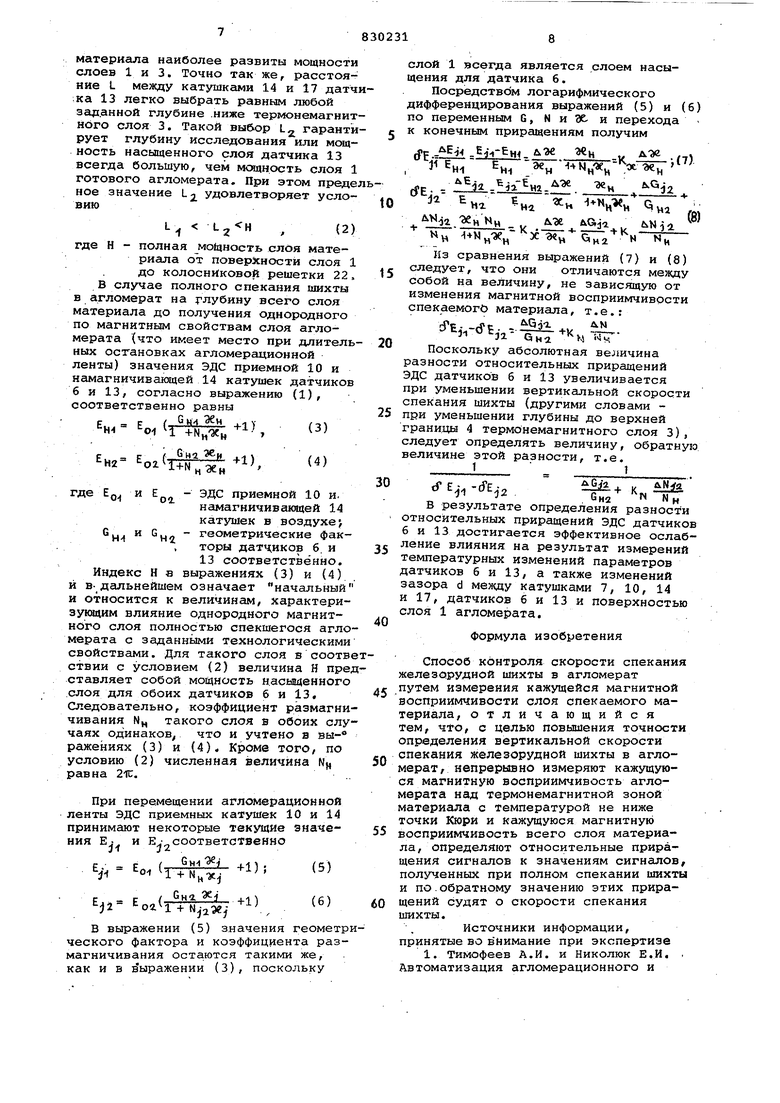
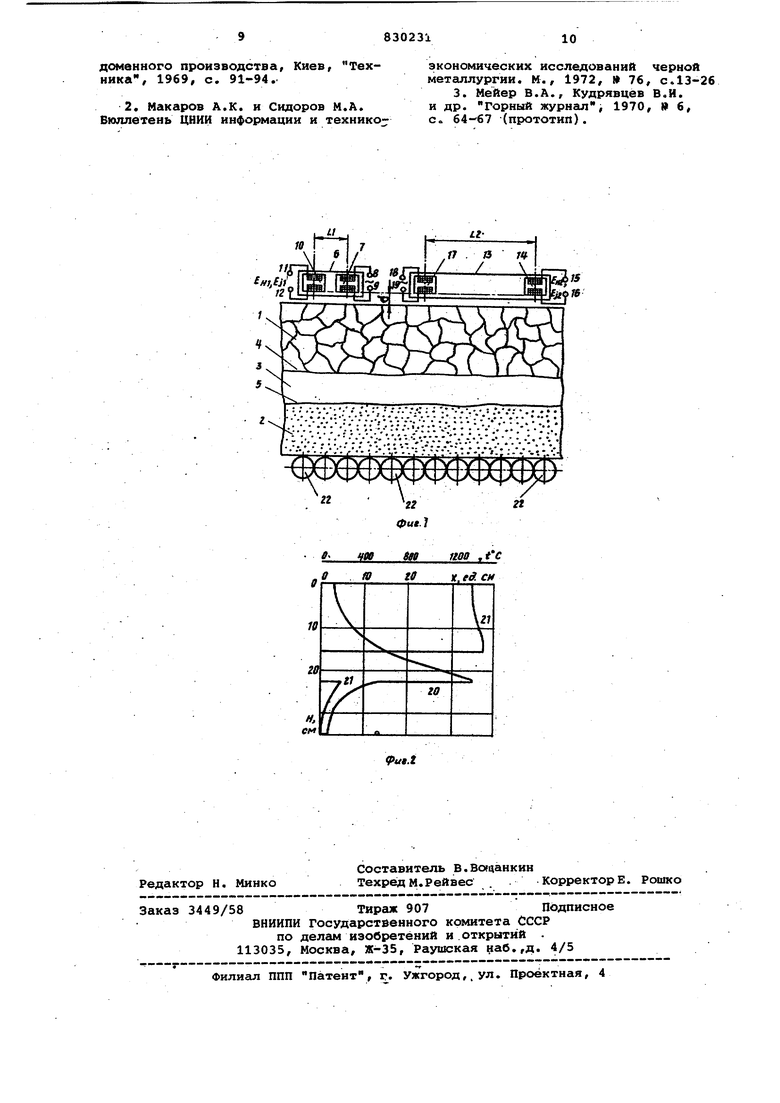
На фиг. 1 представлена послойная структура спекаемого материала, поперечный разрез, и схема размещения катушек обоих магнитоиндукционных датчиков} на фиг. 2 - графики распределения температуры и магнитной восприимчивости по глубине спекаемого слоя.
В поперечном разрезе спекаемого материала можно выделить три отдельных слоя (фиг. 1): верхний слой 1 готового агломерата, нижний слой 2 исходной шихты и термонемагнитный слой 3, имеющий верхнюю 4 и нижнюю 5 границы. У поверхности слоя 1 размещены магнитоиндукционный датчик 6, содержащий намагничивающую катушку 7 с выводами 8 и 9и приемную катушку 10 с выводами 11 и 12, И датчик 13, состоящий из намагничивающей 14 с выводами 15 и 16 и приемной 17 с выводами 18 и 19 катушек. Катушки 7, 10, 14 и 17 установлены на фиксированном расстоянии d от поверхности слоя 1, причем расстояние между катушками 7 и 10 равно L. , а между катушками 14 и 17 - La.
Распределение температуры t С по глубине спекаемого слоя представлено на фиг. 2 кривой 20, а распределение магнитной восприимчивости Эе - кривой 21.
В таблице представлены предельные значения магнитной восприимчивости де вещества каивдого слоя, а также предельные значения отнбсительных мощностей каждого слоя при транспортировании материала спекательной тележкой (паллетой) с момента зажигания шихты до момента разгрузкЬ агломерата.
10
15
Слой 1 готового агломерата 15
100
60
Слой 2 исходИз распределения ЭЕ- по глубине всего слоя спекаемого материала (фиг.2, кривая 21), и данных таблицы следует, что объективной физической предпосылкой способа является наличие
в вертикальном разрезе транспортируемого агломсшшной железорудного материала практически лишь одного магнитного слоя, мощность которого зависит от вертикальной скорости
спекания, а именно: слоя 1 готового агломерата, ограниченного снизу верхней границей 4 термонемагнитного слоя 3. Обе границы; 4 и 5 термонемагнитного слоя 3 .образованы значениями
точки Кюри в магнитной фракции спекаемого материала, представленной преимущественно магнетитом (j8tD ).
Вследствие этого, датчик б, у которрго расстояние Ц между намагничивакщей 7 и приемной 10 катушками выбрано равным любой заданной глубине вывие термонемагнитного слоя 3, обладает глубиной исследования всегда меньше любой заданной минимальной
мощности слоя 1 готового агломерата. Выбор места установки датчика относительно начала или окончания процесса спекания, которое удовлетворяет приведенному условию, не представляет никаких затруднений. Очевидно, что наиболее выгодной является установка датчика ближе к оконча- нию процесса, например в районе предпоследней вакуум-камеры, где в по перечном сечении потока спекаемого материала наиболее развиты мощности слоев 1 и 3. Точно так же, расстояние L между катушками 14 и 17 датч ;ка 13 легко выбрать равным любой за 1анной глубине .ниже термонемагнит ного слоя 3. Такой выбор L j, гаранти рует глубину исследования или мсяцность насыщенного слоя датчика 13 всегда большую, чем мсядность слоя 1 готового агломерата. При этом преде ное значение L удовлетворяет уелоВИЮL L,,H где Н - полная мо(аность слоя материала от поверхности слоя 1 до колосниковой решетки 22. В случае полного спекания шихты в агломерат на глубину всего слоя материала до получения однородного по магнитным свойствам слоя агломерата (что имеет место при длитель ных остановках агломерационной ленты) значения ЭДС приемной 10 и намагничивакяцей 14 катушек датчиков б и 13, согласно выражению (1), соответственно равны с F / G ш н . л Y 1-1 М 01 4 +NjXj, (3) с с t Q Н7 .-1 2 oi4+N;,3eH где EQ и Е - ЭДС приемной 10 и, намагничивакяцей 14 катушек в воздухеj G... и С..„ - геометрические факНт Н2торы датчиков б. и 13 соответственно. Индекс Н в выражениях (3) и (4) и в-дальнейшем означает начальный и относится к величинам, характеризукнцим влияние однородного магнитного слоя полностью спекшегося агло мерата с заданными технологическими свойствами. Для такого слоя в соотв ствии с условием (2) величина Н пре ставляет собой мощность н.асьЕденного слоя для обоих датчиков 6 и 13, Следовательно, коэффициент размагни чивания NH такого слоя в обоих слу чаях одинаков, что и учтено г вы- ражениях (3) и (4). Кроме того, по условию (2) численная величина Мц равна 21С. При перемещении агломерационной ленты ЭДС приемных катушек 10 и 14 принимают некоторые текущие эначения EJ и Е соответственно с - F / 4-11 : (5) S ° 4 + Мц-х с с / Снг J J.1 ч (f.) Ej2 . В выражении (5) значения геометр ческого фактора и коэффициента размагничивания остаются такими же, как и в выражении (3), поскольку слой 1 всегда является слоем насыщения для датчика б. Посредством логарифмического дифференцирования выражений (5) и (б) по переменным G, N и ЭС- и перехода к конечным приращениям получим (fF. . д-эе S рЛР- ot эец Щ 2 .. на на н NцVн Хоа.нМн л-эе лОзг ./ М4|а Кц +N„-эe„- xэ«„ с,н2 Ц-N Из сравнения выражений (7) и (8) следует, что они отличаются между собой на величину, не зависящую от изменения магнитной восприимчивости спекаемого материала, т.е.: гРс е -- ia-Q KslT; Поскольку абсолютная величина разности относительных приращений ЭДС датчиков б и 13 увеличивается при уменьшении вертикальной скорости спекания шихты (другими словами при уменьшении глубины до верхней границы 4 термонемагнитного слоя 3), следует определять величину, обратную величине этой разности, т.е. 1 1 п tf Е,|, -cfE.2 N Н В результате определения разности относительных приращений ЭДС датчиков б и 13 достигается эффективное ослабление влияния на результат измерений температурных изменений параметров датчиков 6 и 13, а также изменений зазора d мемоду катушками 7, 10, 14 и 17, датчиков б и 13 и поверхностью слоя 1 агломерата. формула изобретения Способ контроля скорости спекания железорудной шихты в агломерат путем измерения кажущейся магнитной восприимчивости слоя спекаемого материала, отличающийся тем, что, с целью повышения точности определения вертикальной скорости спекания железорудной шихты в агломерат, непреривно измеряют кажущуюся магнитную восприимчивость агломерата над термонемагнитной зоной материала с температурой не ниже точки Кюри и кажущуюся магнитную восприимчивость всего слоя материала , определяют относительные приращения сигналов к значениям сигналов, полученных при полном спекании шихты и по.обратному значению этих приращений судят о скорости спекания шихты. Источники информации, принятые во внимание при экспертизе 1. Тимофеев А.И. и Николюк Е.И. . Автоматизация агломерационного и
доменного производства, Киев, Техника, 1969, с. 91-94.
2. Макаров А.К. и Сидоров М.А. Бюллетень ЦНИИ информации и техникоэкономических исследований черной металлургии. М., 1972, 76, сЛЗ-26
3. Мейер В.А., Кудрявцев В.И. и др. Горный журнал, 1970, D 6, с. 64-67 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Индукционный датчик | 1979 |
|
SU1019387A1 |
| ИНДУКЦИОННОЕ ЗОНДОВОЕ УСТРОЙСТВО | 1997 |
|
RU2165091C2 |
| Способ подготовки шихты к доменной плавке | 1980 |
|
SU954459A1 |
| Зонд для измерения магнитной восприимчивости и удельной электропроводности (его варианты) | 1984 |
|
SU1231448A1 |
| СПОСОБ ОБНАРУЖЕНИЯ РАЗРЫВОВ ТРОСОВ ТРОСОВОЙ ОСНОВЫ РЕЗИНОТРОСОВЫХ КОНВЕЙЕРНЫХ ЛЕНТ | 1991 |
|
RU2016404C1 |
| УСТРОЙСТВО ДЛЯ ОПЕРАТИВНОГО ОПРОБОВАНИЯ МАГНЕТИТОВЫХ РУД | 2016 |
|
RU2632265C2 |
| УСТРОЙСТВО ДЛЯ ОПРОБОВАНИЯ МАГНЕТИТОВЫХ РУД | 1992 |
|
RU2006888C1 |
| Способ агломерации и устройство для его осуществления | 1985 |
|
SU1423614A1 |
| Способ подготовки тонкоизмельченной агломерационной шихты к спеканию | 1979 |
|
SU907076A1 |
| СПОСОБ ПОДГОТОВКИ АГЛОМЕРАЦИОННОЙ ШИХТЫ К СПЕКАНИЮ | 1998 |
|
RU2128720C1 |
19
20
Ч, см
гг
Ч9в Ш 1UO ,tC
т го x,ed СИ
za
