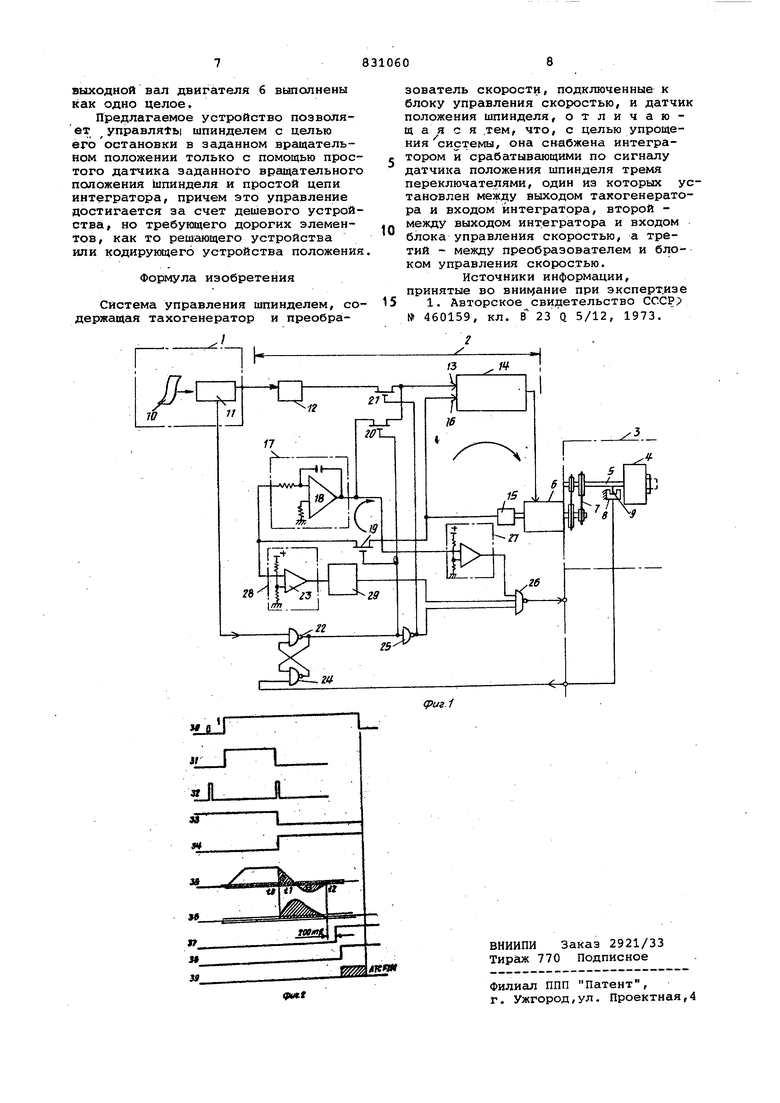
Изобретение относится к устройствам управления станками и может быть использовано для позиционирова ния подвижных элементов станка в за данном положении. Известна система управления остановки шпинделя в заданном положении, содержащая тахогенератор, схему управления с задатником и сумматором, поддерживающих скорость шпинделя в заданных пределах при по зиционировании и датчик положения шпинделя l . Недостатком данной схемы являетс ее сложность за счет применения бол шого количества релейных элементов не обеспечивающих позиционирования шпинделя в заданном положении при перебеге за точку позиционирования Цель изобретения - упрощение сх мы управления. Поставленная цель достигается тем, что система снабжена интегратором и тремя переключателями, один из которых установлен между выходом тахогенератора и входом интегратора, второй - между выходом интегратора и входом блока управления скоростью, а третий - между пре образователем и блоком управления скоростью. На фиг. 1 представлена блок-схема системы; на фиг. 2 - ряд графиков синхронизации импульсов соответствующих частей системы управления. Блок-схема системы управления содержит числовой контроллер 1, цепь управления 2 и металлорежущий станок 3. Металлорежущий станок 3 включает шпиндельную головку 4, снабженную шпинделем 5 и двигателем 6 постоянного тока для привода шпинделя через передаточный механизм 7. Шпиндель 5 снабжен датчиком 8 заданного вращательного положения, состоящего из проксимального выключателя. Проксимальный выключатель , предназначен для подачи сигнала всякий раз, когда магнитный элемент 9, прикрепленный к шпинделю 5, проходит через выключа ттель 8, расположенный против шпинделя 5. Таким образом, один сигнал вьарабатывается в заданном вращательном положении шпинделя 5 при каждом его обороте. Числовой контроллер 1 включает ленту 10 числового управления командами и контроллер 11. На ленте 10 управления записана обычная
команда перемещения по осям и в качестве дополнительных функций, команда скорости шпинделя и команда ориентации шпинделя. Команда скорости шпинделя обеспеЧи:вается в виде команды кода, принимающей форму числовой величины, которая преобразуется с помощью преобразователя 12 постоянного - переменного тока цепи 2 управле(ния шпинделем в командный сигнал скорости,,соответствующий численному значению, который затем подается на первую входную клемму 13 блока 14 управления скоростью, состоящего из фазоуправляющей цепи тиристора. Двигатель 6 шпинделя 5 взаимодействует с датчиком 15 скорости, включающим тахогенератор и вырабатывающим сигнал напряжения, пропорциональный вращающей скорости двигателя 6 шпинделя. Выходной сигнал напряжения от датчика 15 скорости подается в качестве напряжения обратной связи скорости на вторую входную клемму 16 блока 14 управления скоростью. Последнее регулирует ток, подаваемый к двигателю постоянного тока 6 шпинделя за счет регулирования угла срабатывания тиристора, в результате чего напряжение обратной связи к клемме 16 может соответствовать командному напряжению, прикладываемому к клемме 13. Таким образом, скорость двигателя 6 шпинделя может регулироваться с тем, чтобы она соответствовала командному сигналу скорости шпинделя, поступающего с ленты 1-0 управления.
В предлагаемой системе в цепь 2 управления шпинделем добавлены несколько цепей достижения ориентации шпинделя 5. Таким образом, цепь интегратора 17 предусмотрена дл интегрирования определяющего сигнала скорости диагонали и включает операционный усилитель 18. Входная клемма цепи интегратора 17 соединяется через аналоговый выключатель 19 с выходной клеммой датчика 15 скорости, а ее выходная клемма - через аналоговый выключатель 20 с выходной клеммой 13 блока ±4 управления скоростью. Между преобразователем 12 и входной клеммой 13 блока 14 управления скоростью встроен аналоговый выключатель 21. Управление выключателями 19, 20 и 21 осуществляется в ответ на поступление выходного сигнала от запирающей цепи 22. Когда выключатель 19 находится в замкнутом положении, а выключатели 20 и 21 в разомкнутом положении, то скорость двигателя б настраивается равной командному сигналу скорости с помощью контура управления скоростью,включающего блок 14 управления скоростью двигатель 6 шпинделя и датчик 15 скорости.
При размыкании (выключении) выключателя 21 и замыкании (включении) выключателей 20 и 19 цепь интегратор 17 начинает интегрировать выходные сигналы напряжения, поступаквдие от датчика 15 скорости, в результате чего на клемму 13 блока 14 управления скоростью вместо командного сигнала скорости поступает выходной сигнал напряжения от цепи интегратора 17. Полярность выходного напряжения от цепи интегратора 17 выбирается противоположной полярности выходного напряжения, полученного в этот момент от датчика 15 скорости. Выходно напряжение от цепи интегратора 17 представляет собой величину вращения выходного вала двигателя шпинделя 5 после выключения выключателя 19. Это выходное напряжение и выходное напряжение от датчика 15 скорости соответственно прикладываются к блоку 14 управления скоростью в указанной зависимости и, как результат этого, выходной вал двигателя б шпинделя 5 регулируется таким образом, что он отклоняется на некоторый угол от положения, которое занимал в момент включения выключателей 19 и
20,а затем возвращается в это положение и останавливается в нем. Команда на ориентацию шпинделя, Тюда-ваемая через контроллер 11 с ланты
10 управления, поступает на один вхо запирающей цепи 22, включающей цепи 23 и 24, а сигнал заданного положения от датчи-ка 8 заданного вращательного положения шпинделя подается на другой вход запирающей цепи 22. Команда ориентации шпинделя является заранее определенной для принятия логического значения 1 в случае достижения ориентации шпинделя и логического значения О в других случаях, кроме того, сигнал заданного положения также заранее задается для принятия логического значения О или 1 в зависимости от того занял ли шпиндель свое заданное вращательное положение. Выходной сигнал от запирающей цепи 22 подается к выключателям 19 и 20, а также к выключателю 21 через цепь 25. Выключатели с 19 по 21 включаются под действием управляющего входа логического О выключаются под действием управляющего входного сигнала логической 1 Следовательно, когда команда ориентации шпинделя представляет О, т.е. в обычном состоянии,то выход от за-, пирающей цепи 22 равен 1 независимо от того был ли приложен сигнал заданного положения, а поэтому включенным остается только выключатель
21,а выключатели 19 и 20 выключены. Когда команда ориентации шпинделя становится 1, то выход от запирающей цепи 22 изменяется на О под действием полученного раньше
сигнала заданного положения, в результате чего выключатель 21 размыкается, а выключатели 19 к 20 замыкаются, обеспечивая срабатывание.
Цепь 26 служит для подачи сигнала конца ориентации (сигнал, позволяющий произвести автоматическую смну инструмента), который указывает на завершение ориентации шпинделя. На первый вход цепи 26 поступает выходной сигнал от датчика 27 ошибки нуля, который вырабатывает логическую- 1, когда выходной сигнал от цепи интегратора 17 равен нулю или ниже заданной допустимой величины. На второй вход цепи 26 поступаетвыходной сигнал от датчика 28 нулевой скорости через задерживающую цепь 29 (200 мс), Датчик 28 нулевой скорости подает через задерживающую цепь 29 сигнал нулевой скорости (логическая 1) с задержкой в 200 мс,когда определяющий сигнал скорости двигателя шпинделя становится равным нулю или меньше заданной допустимой величины. На третий вход цепи 26 подается выходной сигнал от цепи 25. Таким образом, когда подается команда ориентации шпинделя для перевода двигателя 6 шпинделя из режима управления скоростью в режим управления положением с последующей остановкой шпинделя 5 в за,данном положении (когда выход от цепи интегратора 17 становится равным нулю, т.е. скорость двигателя становится равной нулю), то цепь 26 вырабатывает сигнал конца ориентации (логический О), указывающий на то, что может начинаться автоматическая смена инструмента.
Рассмотрим работу системы управления шпинделем.
На фиг. 2 обозначены: 30 - команда ориентации шпинделя, 31 - команда скорости ориентации, 32 - определяющий сигнал, 33 - включение выключателя 21, 34 - срабатывание выключателей 19 и 20, 35 - напряжение, представляющее скорость двигателя шпинделя, 36 - выходной сигнал от цепи интегратора 17, 37 - сигнал нулевой скорости, 38 - сигнал конца ориентации и 39 - срабатывание автоматической смены инструмента.
При поступлении команды ориентации шпинделя контроллер 11 подает команду низкой скорости на преобразовател 12, и команда скорости ориентации становится заранее заданным низким напряжением, в результате чего двигатель 6 шпинделя вращается со скоростью ориентации (низкая скорость) . Как показано на рис. 2 (графики 32, 33, 34) при поступлении пер вого сигнала заданного положения шпиделя выключатель 21 из положения Включено переходит в положение - Выключено, а выключатели 19 и 20
из положения Выключено в положение Включено в момент времени tg. Следовательно, цепь интегратора 17 начинает интегрировать напряжение-скорости, являющееся показателем действительной скорости двигателя 6 шпинделя, а выходное напряжение от цепи интегратора 17 прикладаавается к блоку 14 управления скоростью в полярности, обратной той, которая имеется у выходного напряжения, получаемого
o в момент времени tg надатчике скорости 15. В результате этого, хотя I скорость уменьшилась, однако двигатель 6 шпинделя продолжает вращаться в том же направлении, в каком он
5 вращался до сих пор, и наконец останавливается в момент t , а выход от цепи интегратора 17 достигает своей максимальной величины. Следовательно, двигатель 6 шпинделя на0чинает вращаться в обратном направлении и выходная величина от цепи интегратора 17 постепенно уменьшается и к моменту tj достигает нуля. Так как выходная величина от цепи интегратора 17 постепенно уменьша5ется, то скорость вращения двигателя 6 в обратном направлении также постепенно уменьшается и к моменту tjдостигает нуля. Хотя двигатель 6 может повторить движение в обратном
0 направлении в зависимости от усилейия цепи и величины нагрузки, однако он останавливается окончательно в положении, в котором выходное напряжение цепи интегратора 17 уменьшается
5 до нуля. Двигатель 6 шпинделя и шпиндель 5 (см. график 35 на фиг. 2) отклоняются от положения первого сигнала заданного положения, полученного в виде угла, соответствующего пло0щади зоны ф , а затем поворачиваются в обратном направлении на угол, соответствующий площади зоны 3 , равной зоне Ф , и наконец останавливается в положении, в котором вырабатывается сигнал заданного поло5жения.
Как показано на поз.37, сигнал нулевой скорости вырабатывается через некоторое время (200 мс) после момента, когда скорость вращения
0 шпинделя становится равной нулю или меньше заданной.величины, и в ответ на это поступает сигнал завершения ориентации. После этого, происх 5 цит автоматическая смена инструмента,
5 а под действием сигнала конца автоматической смены инструмента снимается команда ориентации шпинделя. Хотя проксимальный выключатель используется в качестве датчика .задан0ного положения вращения в предлагаемой конструкции, однако вместо него может применяться выключатель оптического или контактного типа. Кроме того, устройство может применяться в тех случаях, когда шпиндель 5 и
5
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления для остановки шпинделя в определенном угловом положении | 1980 |
|
SU1308185A3 |
| Устройство для остановки шпинделя в заданном положении | 1980 |
|
SU1148555A3 |
| Устройство для программного управления подачей длинномерного материала в рабочую зону обрабатывающей машины | 1982 |
|
SU1092482A1 |
| Устройство для автоматической склейки бумажных полотен | 1984 |
|
SU1235803A2 |
| Электронная система управления вращающимся трансмиссионным сцеплением транспортного средства (ее варианты) | 1982 |
|
SU1261557A3 |
| Способ точной автоматической синхронизации синхронного двигателя, питаемого от преобразователя частоты с инвертором тока, с сетью переменного тока промышленной частоты | 1990 |
|
SU1744755A1 |
| ПРОГРАММНО-УПРАВЛЯЕМЫЙ ПЛАНСУППОРТ | 1990 |
|
RU2027577C1 |
| Электропривод постоянного тока | 1986 |
|
SU1384170A1 |
| Устройство для управления остановом шпинделя в заданном положении | 1980 |
|
SU1175357A3 |
| Устройство для управления поперечной резкой ленты стекла | 1985 |
|
SU1296522A1 |
