Изобретение относится к станкостроению и может быть использовано в станках с числовым программным управлением (ЧПУ) сверлильно-фрезерно-расточной группы.
Известен плансуппорт, содержащий неподвижный и вращающийся корпуса, последний из которых имеет конический хвостовик, устанавливаемый в шпиндель станка, центральную часть, проходящую через неподвижный корпус и связанную с ним через подшипники, а также переднюю полую плиту, на направляющих которой смонтирован радиальный суппорт с режущим инструментом, причем суппорт через кинематическую цепь связан с электродвигателем, который закреплен в неподвижном корпусе, в заднем торце неподвижного корпуса закреплена первая часть электромеханического стыковочного узла, электрические контакты которой связаны с электродвигателем, а электрические контакты второй ответной части стыковочного узла закреплены на шпиндельной бабке станка, на неподвижном корпусе расположен также механизм расфиксации вращающегося и неподвижного корпусов при стыковке двух частей стыковочного узла. Кинематическая цепь, связывающая суппорт и электродвигатель, выполнена в виде двойной дифференциальной зубчатой передачи, на валу электродвигателя установлен датчик положения.
Недостатком данной конструкции является то, что из-за длинной многозвенной кинематической цепи, связывающей суппорт и электродвигатель, имеется относительно большой допустимый люфт между валом двигателя и этим суппортом. В результате не обеспечивается высокая точность позиционирования радиального суппорта.
Наиболее близким к предлагаемому по технической сущности является программоуправляемый плансуппорт, содержащий неподвижный и вращающийся корпуса, последний из которых имеет конический хвостовик, устанавливаемый в шпиндель станка, центральную часть, проходящую через неподвижный корпус и связанную с ним через подшипники, а также переднюю полую плиту, на направляющих которой смонтирован радиальный суппорт с режущим инструментом, причем суппорт через кинематическую цепь связан с шаговым электродвигателем, который расположен внутри вращающегося корпуса и электрически соединен с контактными кольцами, закрепленными на наружной поверхности вращающегося корпуса и находящимися в контакте со щетками неподвижного корпуса, на заднем торце неподвижного корпуса закреплена первая часть электромеханического стыковочного узла, электрические контакты которой связаны с упомянутыми щетками, а электрические контакты второй ответной части стыковочного узла, закрепляемой на шпиндельной бабке станка, связаны через блок питания электродвигателя с клеммами для подключения входов устройства ЧПУ, в неподвижном корпусе расположен также механизм расфиксации вращающегося и неподвижного корпусов при стыковке двух частей стыковочного узла.
Недостатком этого плансуппорта является то, что точность перемещения радиального суппорта с режущим инструментом невысокая, что обусловлено тем, что управление шаговым электродвигателем происходит через пары контактное кольцо - щетка, которые могут быть источником помех при передаче информации на этот электродвигатель. Требования к точности изготовления самих пар весьма высокие. Управление шаговым двигателем происходит в разомкнутом контуре без цепи обратной связи. Пуск и останов плансуппорта, изменение режимов резания приводят к значительным угловым ускорениям, что также может привести к сбоям в работе: появлению ошибки движения суппорта из-за инерции ротора шагового электродвигателя. Кроме того, из-за отсутствия обратной связи по положению суппорта выход на нулевую отметку (на начало отсчета радиального перемещения суппорта) возможен лишь после специальной наладочной процедуры, включающей в себя, например, контрольную проточку, ручные измерения, и лишь затем автоматизированный выход на эту нулевую отметку и такую процедуру необходимо проводить каждый раз при потере информации о текущем положении суппорта, вызванной сбоем в работе устройства ЧПУ. По причинам крайне ограниченного пространства внутри вращающегося корпуса невозможно предусмотреть специальные системы принудительного охлаждения шагового электродвигателя. Это приводит либо к требованию уменьшения токов через обмотки электродвигателя, но следовательно, к уменьшению допустимого момента на его валу, либо к перегреву обмоток, уменьшению надежности работы шагового электродвигателя, а потому всего плансуппорта.
Целью изобретения является повышение надежности работы и точности перемещения режущего инструмента.
Это достигается тем, что программноуправляемый плансуппорт, содержащий неподвижный и вращающийся корпуса, последний из которых имеет конический хвостовик, устанавливаемый в шпиндель станка, центральную часть, проходящую через неподвижный корпус и связанную с ним через подшипники, а также переднюю полую плиту, на направляющих которой смонтирован радиальный суппорт с режущим инструментом, причем суппорт через кинематическую цепь связан с электродвигателем, который расположен внутри вращающегося корпуса и электрически соединен с контактными кольцами, закрепленными на наружной поверхности вращающегося корпуса и находящимися в контакте со щетками неподвижного корпуса, на заднем торце неподвижного корпуса закреплена первая часть электромеханического стыковочного узла, электрические контакты которой связаны со щетками, а электрические контакты второй ответной части стыковочного узла, закрепляемой на шпиндельной бабке станка, связаны через блок питания электродвигателя с клеммами для подключения входов устройства ЧПУ, в неподвижном корпусе расположен также механизм расфиксации вращающегося и неподвижного корпусов при стыковке двух частей стыковочного узла, согласно изобретению снабжен датчиком положения, радиоканалами, двумя конечными путевыми выключателями для определения крайних положений суппорта, при этом электродвигатель выполнен в виде двигателя с возбуждением от постоянных магнитов, находящегося в стакане из немагнитного материала, каждый радиоканал включает в себя смонтированные во вращающемся корпусе и последовательно соединенные модулятор и передающую замкнутую кольцевую антенну, а также смонтированные в неподвижном корпусе и последовательно соединенные приемную замкнутую кольцевую антенну, размещенную напротив передающей, и демодулятор, антенны соосны с осью вращения плансуппорта и электрически изолированы от корпусов, выходы датчика положения и контакты конечных выключателей через соответствующие радиоканалы и первую группу дополнительных электрических контактов стыковочного узла связаны с клеммами для подключения входов устройства ЧПУ, блок питания радиоканалов и датчика положения через вторую группу дополнительных контактов стыковочного узла подключен к шинам питания демодуляторов радиоканалов, а также через дополнительные щетки и контактные кольца - к шинам питания модуляторов радиоканалов и датчика положения, блок питания электродвигателя содержит узел косвенного вычисления скорости вращения ротора электродвигателя, регулятор скорости вращения электродвигателя и сумматор, неинвертирующий вход которого соединен с клеммами для подключения выходов устройства ЧПУ, инвертирующий вход связан с выходом упомянутого узла вычисления, а выход - через регулятор с выходом блока питания электродвигателя, кинематическая цепь включает в себя винтовую пару, линейно подвижный элемент которой соединен с суппортом, а вращающийся элемент - с валом датчика положения, установленного во вращающемся корпусе, на котором установлены также конечные выключатели для определения крайних положений суппорта.
На наружные поверхности антенн нанесены диэлектрические в защитные покрытия. Конечные путевые выключатели снабжены дополнительными размыкающими контактами, включенными последовательно с электродвигателем, параллельно контактам подсоединены два встречно включенных диода, общая точка которых объединена с общей точкой дополнительных контактов выключателей.
С целью расширения функциональных возможностей путем введения режима ручного управления положением суппорта и дополнительного повышения точности перемещения режущего инструмента блок питания электродвигателя снабжен быстродействующим каналом отрицательной обратной связи по положению содержащим анализатор рассогласования, первый вход которого соединен с выходом формирователя импульсов задания, обеспечивающего частоту следования импульсов, пропорциональную заданной скорости перемещения режущего инструмента, а второй вход - с формирователем импульсов отработки положения, вход которого подключен к дополнительным контактам упомянутой первой группы, связанным с выходами датчика положения, выход анализатора соединен с дополнительным входом сумматора блока питания электродвигателя.
Плата узла косвенного вычисления скорости может быть расположена в неподвижном корпусе, а выход узла вычисления связан с инвертирующим входом сумматора через третью группу дополнительных контактов стыковочного узла. Плата модуляторов радиоканалов может быть расположена внутри корпуса датчика положения.
Каждый демодулятор содержит на входе преселектор, выполненный в виде усилительного каскада на резонансном контуре, причем выход преселектора связан с приемным блоком, на входе которого имеется пороговый элемент, выход которого подключен к входу многоотводной линии задержки и первому входу элемента И-НЕ, к другим входам которого подключены выходы линии задержки, кроме последнего, который соединен с тактовым входом D-триггера, к информационному входу которого подключен выход элемента И-НЕ, при этом выход D-триггера является выходом демодулятора.
Сопоставительный анализ с прототипом показывает, что заявленный плансуппорт отличается тем, что снабжен датчиком положения, радиоканалами, двумя конечными путевыми выключателями для определения крайних положений суппорта, причем электродвигатель выполнен в виде двигателя с возбуждением от постоянных магнитов, находящегося в стакане из немагнитного материала. Таким образом, заявленный плансуппорт соответствует критерию изобретения "новизна".
Сравнение не только с прототипом, но и с другими техническими решениями в данной области техники не позволило выявить в них признаки, отличающие предложение от прототипа, что позволяет сделать вывод о соответствии критерию "существенные отличия".
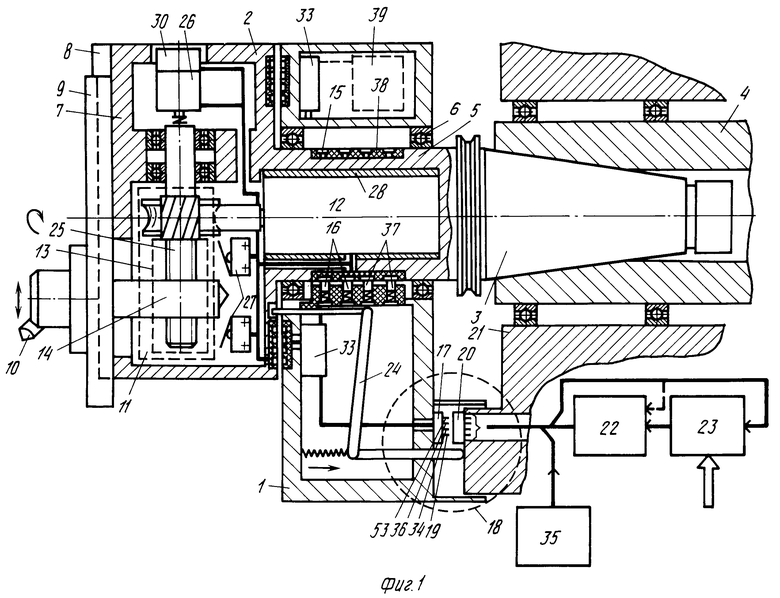
На фиг. 1 представлен плансуппорт, продольный разрез; на фиг. 2 показана схема радиоканалов, питания датчика положения и этих радиоканалов; на фиг. 3 - схема блока питания электродвигателя; на фиг. 4 показано расположение антенн на вращающемся и неподвижном корпусах; на фиг. 5 изображена схема включения дополнительных контактов конечных выключателей; на фиг. 6 - блок-схема демодулятора.
Программноуправляемый плансуппорт содержит неподвижный 1 и вращающийся 2 корпуса, последний из которых имеет конический хвостовик 3, устанавливаемый в шпиндель 4 станка, центральную часть 5, проходящую через неподвижный корпус 1 и связанную с ним через подшипники 6, а также переднюю полую плиту 7, на направляющих 8 которой смонтирован радиальный суппорт 9 с режущим инструментом 10. Суппорт 9 через кинематическую цепь 11 связан с электродвигателем 12 с возбуждением от постоянных магнитов, расположенным внутри вращающегося корпуса 2, в данном примере конкретного выполнения внутри центральной части 5 корпуса 2. Кинематическая цепь 11 включает в себя винтовую пару 13, линейно подвижный элемент - гайку 14, которая соединена с суппортом 9. Электродвигатель 12 электрически соединен с контактными кольцами 15, закрепленными на наружной поверхности вращающегося корпуса 2 и находящимися в контакте с двумя щетками 16 неподвижного корпуса 1.
В заднем торце неподвижного корпуса 1 закреплена первая часть 17 электромеханического стыковочного узла 18, электрические контакты 19 которой связаны со щетками 16, а электрические контакты второй ответной части 20 стыковочного узла 18, закрепляемой на шпиндельной бабке 21 станка, связаны через блок 22 питания электродвигателя 12 с клеммами для подключения входов устройства 23 ЧАУ. В неподвижном корпусе 1 расположен также механизм 24 расфиксации вращающегося 2 и неподвижного 1 корпусов при стыковке двух частей 17 и 20 стыковочного узла 18.
Вращающийся элемент - винт 25 винтовой пары 13 соединен с валом датчика 26 положения, установленного во вращающемся корпусе 2, где установлены также конечные выключатели 27 для определения крайних положений суппорта 9. Электродвигатель 12 находится в стакане 28 из немагнитного материала.
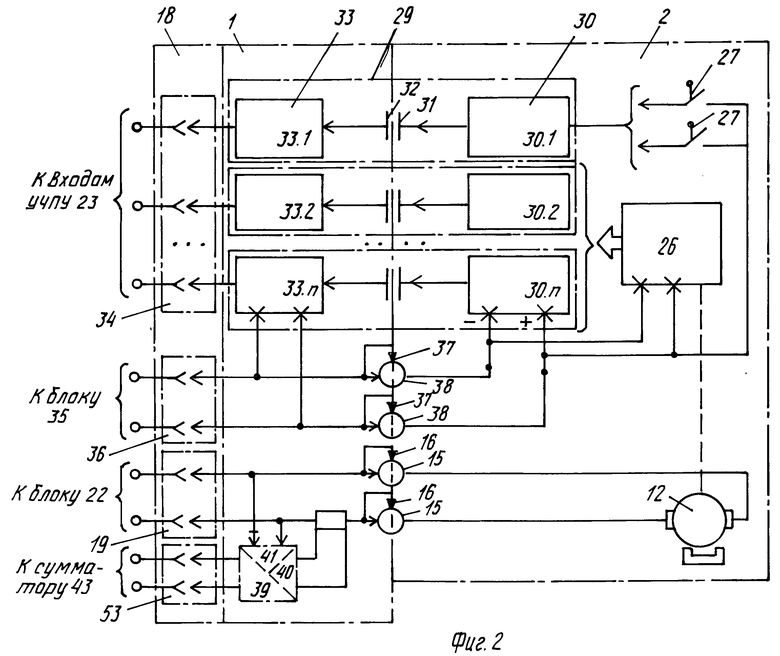
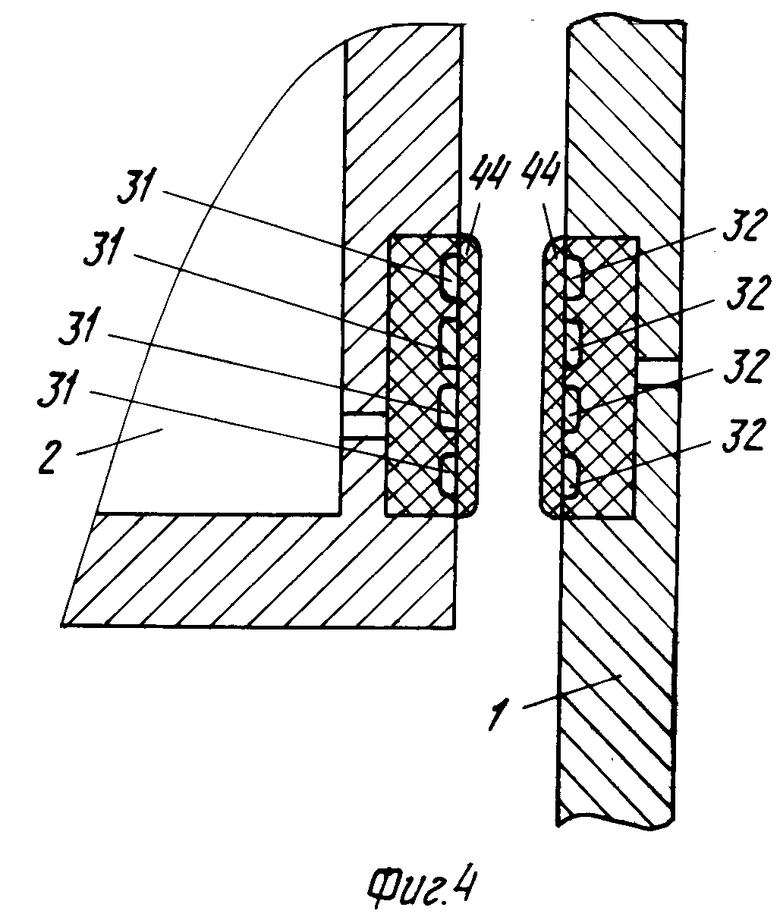
Плансуппорт снабжен также радиоканалами 29 (фиг. 2), каждый из которых включает в себя смонтированные во вращающемся корпусе 2 и последовательно соединенные модулятор 30 и передающую замкнутую кольцевую антенну 31, а также смонтированные в неподвижном корпусе 1 и последовательно соединенные приемную замкнутую кольцевую антенну 32, размещенную напротив передающей антенны 31, и демодулятор 33. Антенны 31 и 32 соосны с осью вращения плансуппорта и электрически изолированы от соответствующих корпусов 2 и 1. Выходы датчика 26 положения и контакты конечных выключателей 27 через соответствующие радиоканалы 29 и первую группу 34 дополнительных электрических контактов стыковочного узла 18 связаны с клеммами для подключения входов устройства 23 ЧПУ. Блок 35 питания радиоканалов 29 и датчика 26 положения через вторую группу 36 дополнительных контактов стыковочного узла 18 подключен к шинам питания демодуляторов 33 радиоканалов 29, а также через дополнительные щетки 37 и контактные кольца 38 - к шинам питания модуляторов 30 радиоканалов 29 и датчика 26 положения.
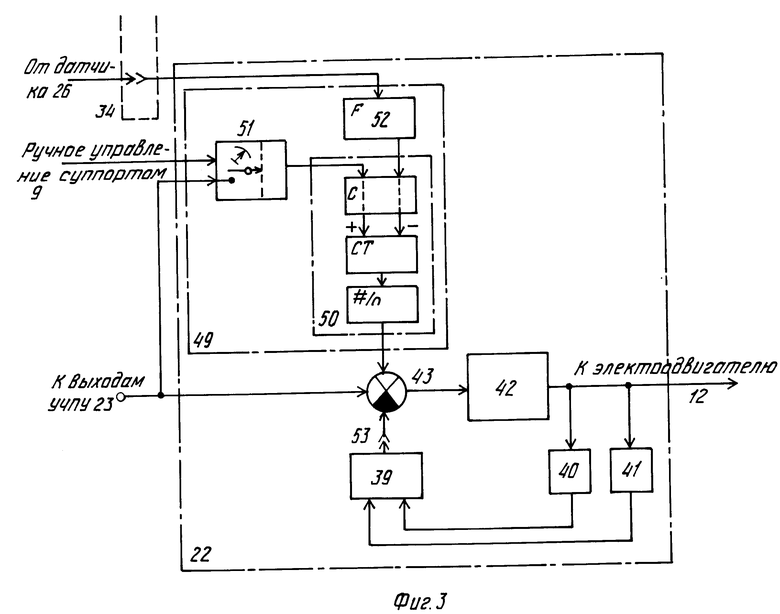
Блок 22 питания электродвигателя 12 (фиг. 3) содержит узел 39 косвенного вычисления скорости вращения ротора электродвигателя по электрическим измерениям с помощью датчиков 40 и 41 тока и напряжения соответственно, регулятор 42 скорости вращения электродвигателя и сумматор 43, неинвертирующий вход которого соединен с клеммами для подключения выходов устройства 23 ЧПУ, инвертирующий вход связан с выходом узла 39 вычисления, а выход - через регулятор 42 с выходом блока 22 питания электродвигателя 12.
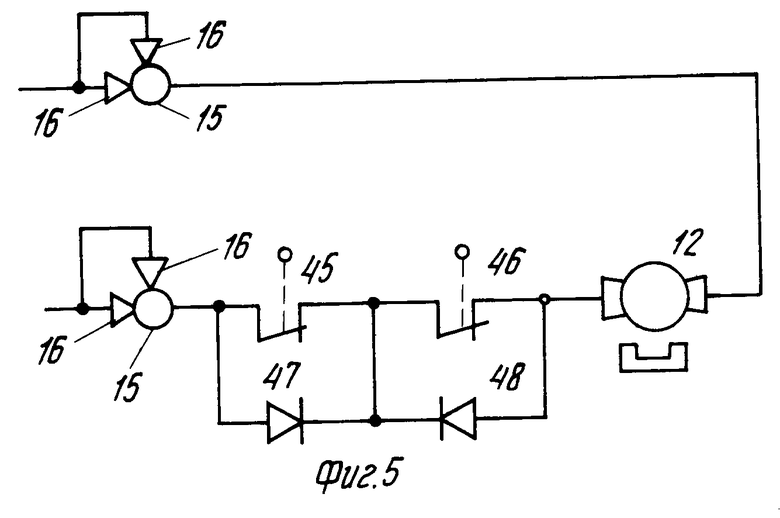
На наружные поверхности антенн 31 и 32, в частности, нанесены электрические защитные покрытия 44 (фиг. 4). Конечные путевые выключатели 27, в частности, снабжены дополнительными размыкающими контактами 45 и 46 (фиг. 5), включенными последовательно с электродвигателем 12. Параллельно контактам 45 и 46 подсоединены два встречно включенных диода 47 и 48, общая точка которых объединена с общей точкой дополнительных контактов 45 и 46 выключателей 27.
Блок 22 питания электродвигателя снабжен (фиг. 3) быстродействующим каналом 49 отрицательной обратной связи по положению, содержащим анализатор 50 рассогласования, первый вход которого соединен с выходом формирователя 51 импульсов задания, обеспечивающего частоту следования импульсов, пропорциональную заданной скорости перемещения режущего инструмента 10, второй вход - с выходом формирователя 52 импульсов отработки положения, вход которого подключен к дополнительным контактам первой группы 34, связанным с выходами датчика 26 положения, а выход - с дополнительным входом сумматора 43 блока 22 питания электродвигателя 12.
Плата узла 39 косвенного вычисления скорости, в частности, расположена в неподвижном корпусе 1, при этом выход узла 39 вычисления связан с инвертирующим входом сумматора 43 через третью группу 53 дополнительных контактов стыковочного узла 18. Плата модуляторов 30 радиоканалов 29, в частности, расположена внутри корпуса датчика 26 положения.
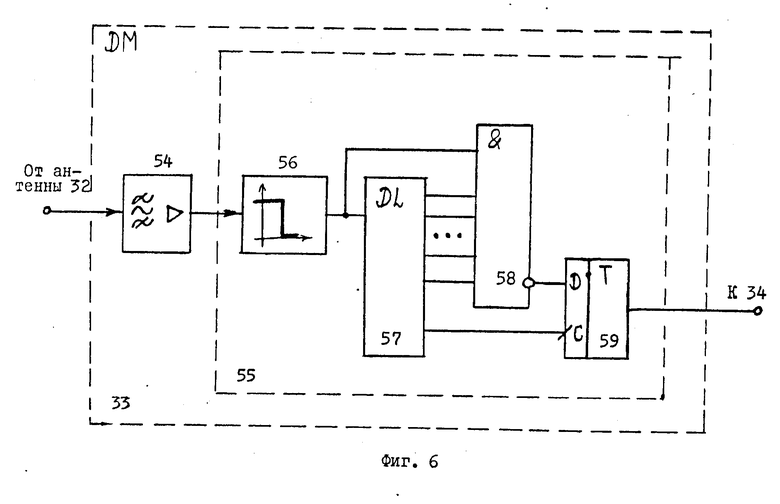
Каждый демодулятор 33 радиоканала (фиг. 6) содержит преселектор 54, выполненный в виде усилительного каскада на резонансном контуре. Выход преселектора связан с приемным блоком 55, на входе которого имеется пороговый элемент 56. Выход последнего подключен к входу многоотводной линии 57 задержки и первому входу элемента И-НЕ 58, к другим входам которого подключены выходы линии 57 задержки, кроме последнего. Он соединен с тактовым входом D-триггера 59, к информационному входу которого подключен выход элемента И-НЕ 58, при этом выход D-триггера 59 является выходом демодулятора 33.
Программноуправляемый плансуппорт работает следующим образом.
Хвостовик 3 закрепляется в шпинделе 4 станка, производится стыковка первой 17 и второй 20 частей стыковочного узла 18 (фиг. 1). При этом срабатывает механизм 24 и обеспечивается свободное вращение корпуса 2 относительно неподвижного корпуса 1.
Установка в исходное положение, т.е. поиск исходного (нулевого) положения суппорта, производится следующим образом. По команде, формируемой устройством 23 ЧПУ и передаваемой блоком 22 через электрические контакты 19 стыковочного узла 18, щетки 16 и кольца 15 на электродвигатель 12, последний начинает вращаться. Движение передается через кинематическую цепь 11 гайке 14 и суппорту 9, которые начинают перемещаться радиально относительно оси вращения шпинделя 4. После того, как гайка 14 переместится в одно из своих крайних положений, срабатывает соответствующий конечный выключатель 27. Сигнал с этого выключателя через соответствующий радиоканал 29 (фиг. 2) и контакты первой дополнительной группы 34 передается на входу устройства 23 ЧПУ. В данном конкретном примере могут использоваться устройства ЧПУ типа МС 2101.05. Пpи этом признаком установки в исходное положение суппорта 9 является появление на соответствующем выходе датчика 26 положения сигнала нулевой метки (НМ). В качестве датчика 26 положения может быть использован фотоимпульсный датчик ВЕ-178А5. На входы устройства 23 ЧПУ сигнал НМ также поступает через соответствующие каналы 29 и контакты группы 34.
Управление положением суппорта 9 происходит следующим образом. Импульсный сигнал, несущий информацию о текущем положении вала датчика 26, а следовательно, и о положении суппорта 9, передается с выходов датчика 26 через соответствующие радиоканалы 29 и контакты группы 34 на входы устройства 23 ЧПУ, которое обрабатывает этот сигнал и сравнивает с заданным положением суппорта 9, формируемым программно или с пульта управления устройства 23 ЧПУ оператором. По рассогласованию текущего и заданного положений в устройстве 23 ЧПУ вычисляется сигнал заданного значения скорости вращения двигателя 12 (например, при этом используются пропорциональный или пропорционально-интегральный закон формирования этого значения). Сигнал заданного значения скорости подается на неинвертирующий вход сумматора 43 блока 22 питания электродвигателя 12. В сумматоре 43 происходит сравнение заданного значения скорости и текущего, вычисленного в узле 39 по электрическим измерениям с помощью датчиков 40 и 41. Узел 39 может быть расположен как внутри блока 22 питания электродвигателя 12, так и внутри неподвижного корпуса 1. При последнем расположении достигается большая функциональная законченность плансуппорта, при этом на контактах третьей дополнительной группы 53 ответной части 20, стыковочного узла 18 появляется сигнал, эквивалентный значению текущей скорости вращения электродвигателя 12. В этом случае в качестве блока 22 может быть использована какая-либо известная система управления электроприводом без снабжения ее узлом 39. Регулятор 42 формирует напряжение питания электродвигателя 12. При этом может быть использован либо принцип подчиненного регулирования, но тогда вместо датчика скорости - тахогенератора в предлагаемом техническом решении используется узел 39, либо специальные методы формирования напряжения питания электродвигателем. Скорость вращения электродвигателя 12 регулируется таким образом, чтобы она была равной заданному значению, вычисляемому устройством ЧПУ.
Предлагаемое техническое решение предусматривает также снабжение блока 22 быстродействующим каналом 49 отрицательной обратной связи по положению суппорта 9. Канал 49 функционирует параллельно устройству 23 ЧПУ и вследствие своего быстродействия формирует сигнал, поступающий на дополнительный вход сумматора 43 и корректирующий между моментами квантования по времени сигнал заданного значения скорости вращения, исходящий от устройства 23 ЧПУ.
Быстродействующий канал 49 функционирует следующим образом. На вход формирователя 52 импульсов отработки положения поступает импульсный сигнал с выходов датчика 26 через соответствующие контакты группы 34 (фиг. 2) и радиоканалы 29. Этот сигнал преобразуется в последовательность импульсов, частота которых пропорциональна скорости движения суппорта 9, поступающих на второй вход анализатора 50 рассогласования (фиг. 3). На его первый вход через формирователь 51 импульсов задания поступают импульсы, частота которых пропорциональна заданной скорости вращения электродвигателя 12. Формирователь 51 может быть выполнен в виде преобразователя напряжение - частота, вход которого подключен к выходу устройства 23 ЧПУ, на котором формируется аналоговый сигнал задания скорости вращения электродвигателя 12. На первый вход анализатора 50 импульсы задания могут поступать непосредственно от устройства ЧПУ (например, от интерполятора). В анализаторе 50 входные импульсы тактируют для обеспечения наличия обязательного временного интервала между этими импульсами, их соответствующим образом считают и преобразуют в сигнал, пропорциональный рассогласованию между заданным и текущим положениями суппорта. Этот сигнал подается на дополнительный вход сумматора 43. Канал 49 может быть использован независимо от устройства 23 ЧПУ в режиме ручного управления положением суппорта. В этом случае импульсы задания формируются в формирователе 51 под воздействием команд оператора, причем количество импульсов пропорционально требуемому перемещению радиального суппорта 9 в определенный интервал времени. В этом режиме сигнал с выхода устройства 23 ЧПУ на неинвертирующий вход сумматора 43 не поступает.
Каждый из радиоканалов 29 работает следующим образом. Сигнал с конечного выключателя 27 либо с одного из выходов датчика 26 поступает на вход модулирующего сигнала модулятора 30. В качестве модулятора может быть использовано устройство, работающее по известному способу амплитудной модуляции. На выходе модулятора 30 образуется высокочастотный сигнал, огибающая которого соответствует сигналу модулятора 30. Этот высокочастотный сигнал передается через антенны 31 и 32 и поступает в ослабленном виде вместе с помехами, например, от работы соседних радиоканалов на вход демодулятора 33, где выделяется полезный сигнал, несущий информацию о срабатывании выключателей 27 либо о выходном напряжении датчика 26. В демодуляторе 33 (фиг. 6), сигнал с приемной антенны 32 поступает на вход преселектора 54, где происходит его усиление. Причем так как в преселекторе используется резонансный контур, настроенный на несущую высокую частоту соответствующего модулятора, то происходит фильтрация сигнала, поступающего только с этого модулятора, т. е. обеспечивается частотная избирательность при усилении. Усиленный и отфильтрованный таким образом сигнал поступает на пороговый элемент 56. Причем, если амплитуда этого сигнала меньше порога срабатывания элемента 56, то на выходе последнего возникает сигнал логической "1". Если амплитуда больше этого порога, то образуется серия импульсов, поступающих на вход многоотводной линии 57 задержки. В качестве линии 57 может быть использован регистр сдвига, на токовый вход которого подают прямоугольные импульсы от генератора. Если сигнал, поступающий с преселектора 54, таков, что на выходе элемента 56 устойчиво установилась логическая "1", то через некоторое время, определяемое временем прохождения сигнала через линию 57, на выход элемента И-НЕ 58 образуется сигнал логического "0", проходящий через D-триггер 59 на выход демодулятора.
Посредством линии 57 задержки и связанных с ней других элементов блока 55 устраняется воздействие помех (например, типа дребезга контактов), которые возможны в момент изменения уровня сигнала на входе преселектора. Таким образом, выходное напряжение D-триггера 59 соответствует модулирующему сигналу на входе модулятора 30. Напряжение питания модуляторов 30, демодуляторов 33 радиоканалов 29, датчиков 26 и конечных выключателей 27 подается от блока 35, причем в неподвижный корпус 1 через вторую группу 36 дополнительных контактов, а во вращающийся корпус 2 еще и через дополнительные щетки 37 и контактные кольца 38.
В плансуппорте предусмотрена защита (фиг. 5), обеспечивающая невозможность движения суппорта в прежнем направлении при срабатывании дополнительных контактов 45 либо 46 конечных выключателей 27. Допустим при движении суппорта в одном из направлений размыкается контакт 45. В этом случае последовательно с якорем двигателя 12 включается диод 47, который пропускает ток такого направления, обеспечивающий движение суппорта только в противоположном относительно преды - дущего направлении. Зона размыкания контактов 45 и 46 должна быть вне рабочей зоны возможных положений суппорта 9, в том числе его исходного положения. Аварийный режим, при котором может возникнуть необходимость в такой защите, - выход из строя блока 22 устройства 23 ЧПУ и т.п.
Немагнитный стакан 28, выполненный, например, из латуни, обеспечивает магнитную изоляцию полей возбуждения электродвигателя 12 от корпуса 2, в частности от его центральной части 5. Тем самым предотвращается налипание на элементы плансуппорта стальным опилок и стружки, неизбежно возникающих при его работе.
Таким образом, использование изобретения позволяет повысить надежность работы и точность перемещения режущего инструмента, поскольку в предлагаемом программноуправляемом плансуппорте пары контактные кольца 15 или 38 и щетки 16 или 37 не являются элементами, через которые передаются информационные сигналы, например, о положении радиального суппорта 9. Через эти пары поступает питание на электродвигатель 12 или на модуляторы 30 и датчик 26. Неизбежно возникающие при этом коммутационные помехи практически не сказываются на точности позиционирования радиального суппорта 9, так как канал, передающий в устройство 23 ЧПУ информацию о положении суппорта, реализован с помощью специальных помехозащищенных радиоканалов 29. Кроме того, упрощается наладочная процедура: выход суппорта 9 на исходное положение (нулевую отметку) после его включения в работу либо после работы устройства 23 ЧПУ. Повышенная точность перемещения режущего инструмента и надежность работы обеспечиваются снабжением плансуппорта узлом 39 косвенного вычисления скорости вращения ротора электродвигателя 12. Это обусловлено тем, что в кинематической передаче от ротора электродвигателя 12 на винт 25 имеется люфт. Если при этом вычислять скорость ротора электродвигателя 12 по сигналам с выходов датчика 26, то в замкнутой системе регулирования положения суппорта 9 электродвигатель 12 - люфт - винт 25 - датчик 26 - устройство 23 ЧПУ - блок 22 могут возникнуть недопустимые автоколебания ротора электродвигателя, приводящие к снижении точности позиционирования суппорта 9 и механическому износу кинематической цепи 11. Решение задачи уменьшения автоколебаний путем непосредственного измерения скорости вращения ротора электродвигателя 12 через установку на его валу, например, тахогенератора невозможно, так как из-за недостатка места внутри вращающего корпуса 2 пришлось бы, во-первых, уменьшать мощность (типоразмер) электродвигателя 12, а во-вторых с помощью дополнительных специальных средств обеспечивать передачу информации с выхода этого тахогенератора в блок 22.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕВОЛЬВЕРНАЯ ГОЛОВКА | 1989 |
|
RU2077412C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСТОЙЧИВОСТИ РЕЗАНИЯ | 1990 |
|
RU2014167C1 |
| ОБРАБАТЫВАЮЩИЙ ЦЕНТР | 1990 |
|
RU2027554C1 |
| РЕЖУЩИЙ ИНСТРУМЕНТ | 1992 |
|
RU2033903C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ОБРАБОТКИ НА ЭЛЕКТРОЭРОЗИОННОМ ВЫРЕЗНОМ СТАНКЕ | 1992 |
|
RU2034684C1 |
| ДИНАМОМЕТРИЧЕСКИЙ ПОДШИПНИКОВЫЙ УЗЕЛ | 1989 |
|
RU2029145C1 |
| ПРИВОД КООРДИНАТНЫХ ПЕРЕМЕЩЕНИЙ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ КРУГЛОШЛИФОВАЛЬНОГО СТАНКА С ЧПУ | 1990 |
|
RU2047473C1 |
| Устройство для радиального перемещения вращающегося инструмента | 1980 |
|
SU931313A1 |
| Расточной плансуппорт | 1984 |
|
SU1209373A1 |
| АКСИАЛЬНО-ПОРШНЕВАЯ ГИДРОМАШИНА | 1992 |
|
RU2037648C1 |
Использование: в станкостроении, в станках с ЧПУ сверлильно-фрезерно-расточной группы. Сущность изобретения: плансуппорт содержит неподвижный и вращающийся корпуса, причем последний имеет хвостовик, устанавливаемый в шпиндель станка. Внутри вращающегося корпуса расположен электродвигатель, связанный через кинематическую цепь с радиальным суппортом. Электродвигатель через контактные кольца, щетки и блок питания связан с устройством ЧПУ. В плансуппорте имеются датчик положения, конечные выключатели, устанавливаемые во вращающемся корпусе, информация с которых через специальные радиоканалы передается в устройство ЧПУ. В качестве электродвигателя используется двигатель постоянного тока с независимым возбуждением, для получения информации о скорости вращения которого используется узел косвенного вычисления скорости по электрическим измерениям тока и напряжения, формируемым в блоке питания электродвигателя. Использование в плансуппорте контактных пар щетки - кольца только для передачи питания электродвигателю и радиоканалам позволяет свести к нулю действие коммутационных помех на точность позиционирования суппорта. 6 з.п. ф-лы, 6 ил.
| Расточная головка | 1977 |
|
SU689784A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
