(54) МЕХАНИЗМ УГЛОВСЙ ОРИЕНТАЦИИ ВАЛА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для привода продольного транспортера кормораздатчика | 1988 |
|
SU1576083A1 |
| Устройство для упаковывания цилиндрических изделий | 1984 |
|
SU1303496A1 |
| Ленточно-шлифовальный станок | 1980 |
|
SU975348A2 |
| Устройство для нанесения меток на корму ткани | 1972 |
|
SU500304A1 |
| МЕХАНИЗМ ДЛЯ ВЫРАБОТКИ НА ТКАЦКОМ СТАНКЕ ТКАНИ РАЗЛИЧНОЙ ПЛОТНОСТИ ПО УТКУ | 1972 |
|
SU354029A1 |
| Устройство для подачи красящей ленты | 1973 |
|
SU634650A3 |
| Шпиль | 1929 |
|
SU18615A1 |
| Копировально-фрезерная головка | 1986 |
|
SU1355375A1 |
| ПОРШНЕВОЙ ГАЙКОВЕРТ | 2010 |
|
RU2444430C1 |
| Устройство для упаковывания цилиндрических изделий | 1988 |
|
SU1537606A1 |
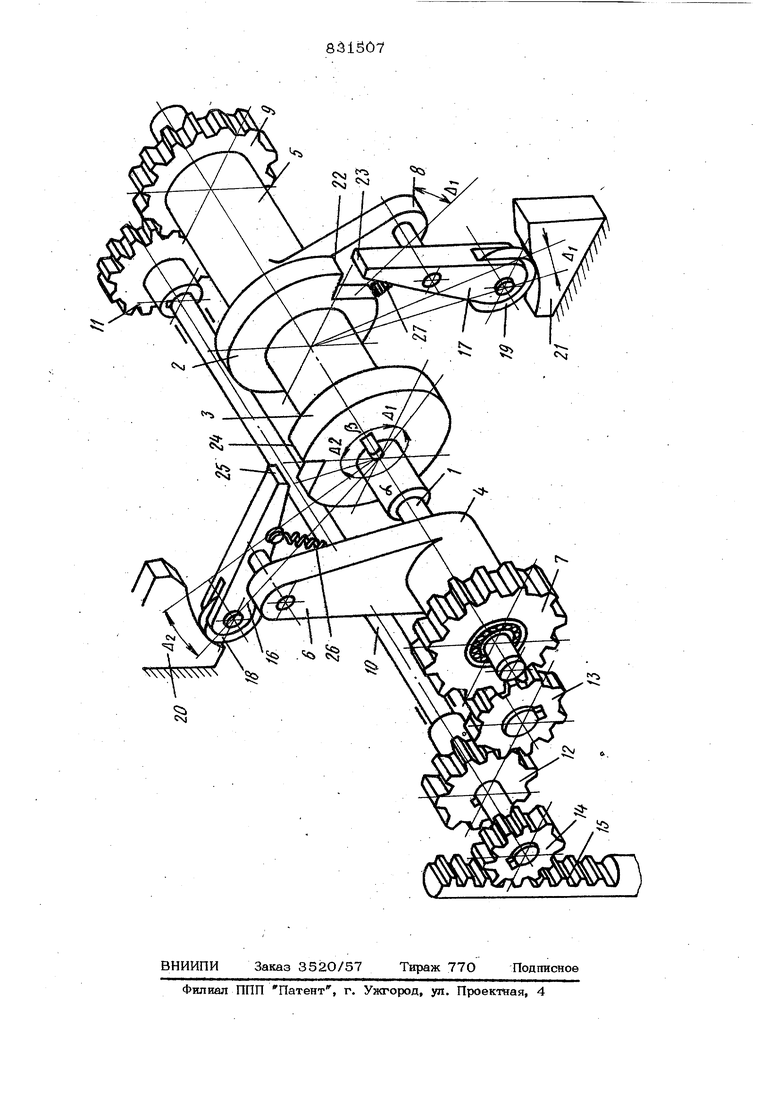
Изобретение относится к станкостроению и может быть использовано в металлорежущих станках для ориентации шпинделей или изделия. Известны механизмы угловой сриентации вала, содержащи два рычага, устано вленных с возможностью поворота от одного привода навстречу друг другу, диск с зубом Cl . Недостатком известных механизмов является необходимость предварительного ориентирования шпинделя. Цель изобретения - упрощение механизма и повышение производительности. Цель достигается тем, что механизм снабжен вторым диском, идентичным первому и жестко связанным с последаим, двумя копирами, закрепленными на корпусе и двумя подпружиненными собачками, установленными по одной на каждом рычаге с возможностью качания и взаимодействия каждой одним кондом с соответствующим копиром, а другим - с соответствующим диском, причем зубья дисков расположены между собсй таким образом, что угол между их рабочими кромками равен (Ь гЬО°-(.л,), где - угол между собачками в исхо/шом положении; л. - углы поворота соответственно первой и второй собачек в контакте со сво-- им копиром до момента касания собачек с поверхностью соответствующего диска. На чертеже изофажен механизм в исходном положении. На ориентируемом валу 1 (привод вращения не показан) жестко закреплены диски 2 и 3 и свободно убтановлены гильы 4 и 5. На одном конце гильзы 4 установлен ычаг 6, а на втором - шестерня 7. Сответственно гильза 5 соединена с рычаом 8 и шестерней 9. Шестерни 7 и 9 3в3 гфиводягся во вращение валом 1О посредсгвом закрепленных на нем шестерен 11 и 12, При этом шестерня 11 непосредственно зацепляется с гпестерней 9, а шестерни 7 и 12 связаны промежуточной паразйтной шестерней 13. Передаточные отношения в обоих зацеплениях по абсолютной величине одинаковы. Вращение валу 10 сообщает шестеренно-реечная передача 14-15. На рычагах 6 и 8 шарнирно установлены собачки 16 и 17, В прорези собачки 16 закреплен ролик 18, а в прорези собачки 17 - ролик 19. В исходном положении механизма ролики 18 и 19 находятся в зоне копиров 2О и 21, На диске 2 выполнен зуб 22, с которым взаимодействует торец 23 собачки 17, а на диске 3 - зуб 24, с которым взаимодействует терец 25 собачки 16. Прижим собачек 16 и 17 к рабочим поверхностям дисков 2 и 3 осуществляется пружинами 26 и 17. Механизм работает следующим образом В исходном положении механизма (рей «а 15 втянута) шестерни 7 и 9 располагаются так, что ролики 18 и 19 собачек 16 и 17 находятся в зоне копиров 20 и 21, При этом торцы 23 и 25 .со- бачек отведены от рабочей поверхности дисков 2 и 3. Вращение ориентируемого вала 1, несущего диски 2 и 3, прекращается , он неподвижен и находится в произвольном положении. При перемещении рейки 15 вверх шестерня 7 с рычагом 6 и собачкой 16 поворачивается по часовой стрелке, а шестерня 9 с рычагом 8 и .собачкой 17 - против часовой стрелки. После поворота шестерен 7 и 9 на угол Л собачка 17 выходит из контакта с копиром 21 и под воздейС1гвием пружины 27 опускается на рабочую поверхность диска 2, При дальнейшем повороте шестерен, когда угол поворота из исходного положения достигнет Д, зацепления с копиром 20 выходит собачка 16, которая под действием пружины 26 опуска- ; бтся на рабочую поверхность диска 3. Рабочие кромки зуба 22 диска 2. и зуба 24диска 3 расположены друг относительно друга под утлом (S 360 - ( + Да) где Л-- угол между торцами 23 и 25собачек в исходном положении механизма. При любом исходном положении вала, с дисками 2 и 3 при вращении шестерен 7 и 9, одна из собачек своим торцом входит в контакт с торцом соответс 7 и поворачивает вал 1 в соующего зуба тветствующем направлении до тех пор ока торец второй собачки не упрется в уб второго диска. Указанное положение является ориентированным. Тот факт, то углы Л: и 2 контакта собачек 16 и 17 с копирами 2О и 21 являются азными и отличаются от угла р между ромками зубьев 22 и 24, предотвраща т возможность одновременного западания собачек 16 и 17 во впадины зубьев 24 к 22 в начальный момент работы мехаизма, даже если вал 1 в конце предыдущего цикла работы остановилЬя после выбега или торможения в положении (юд углом 180 к ориентированному. Рассмотрим случай остановки вала 6 положении, когда угол между торцом 23 и кромкой зуба 22 равен Д , а угол между торцом 25 и кромкой зуба 24 - A-j. , После поворота шестерен 7 и 9 на угол Л собачка 17 входит в зацепление с диском 2, поворачивая вал 1 против часовой стрелки, К моменту выхода собачки 16 из зоны копира 2О и опускания ее на поверхность диска 3 (что произойдет после поворота шестерен на углы Дд ) зуб 24 диска 3 оказывается повернутым против часовой стрелки на угол А , и собачка 16 в этот момент не войдет в зацепление с этим зубом. Благодаря этому фиксация вала в положении, близком к повернутому на 18О относительно ориентированного, исключена. Формула и 3 о б р а т ,е н и я Механизм угловой фиенч ации вала, содержащий два рычага, ус ановленных с возможностью поворота от одного пр.ив(да навстречу друг другу, диск с зубом, отличающийся тем, что, с целью .упрощения механизма и повышения производительнорти, механизм снабжен вторым диском, идентичным ifepBOMy и жестко связанным с последним, двумя копщзами, закрепленными на корпусе и двумя подпружиненными собачками, установленными по одной на каждом рычаге с возможностью качания и взаимодействия каждой одним концом с соответствующим копиром, а другим - с соответствующим диском, причем зубья дисков расположены между собой таким образом, что угол между их рабочими кромками равен (b 3bO°-{cl4 4 2), где оО - угол между собачками в исходном положении; йги д 5fiSlSOV6 углы поворота соответственноИсточники информации, nepmifi в второй собачек в кон . принятые во внимание при экспеогизе такте со своим копиром до момента касания собачек с поверх-1. Патент СШД № 3994061, ностью соответствующего диска, s кл. 29-588, 1976,
