(54) ДАТЧИК УГЛОВ НАКЛОНА ОБЪЕКТА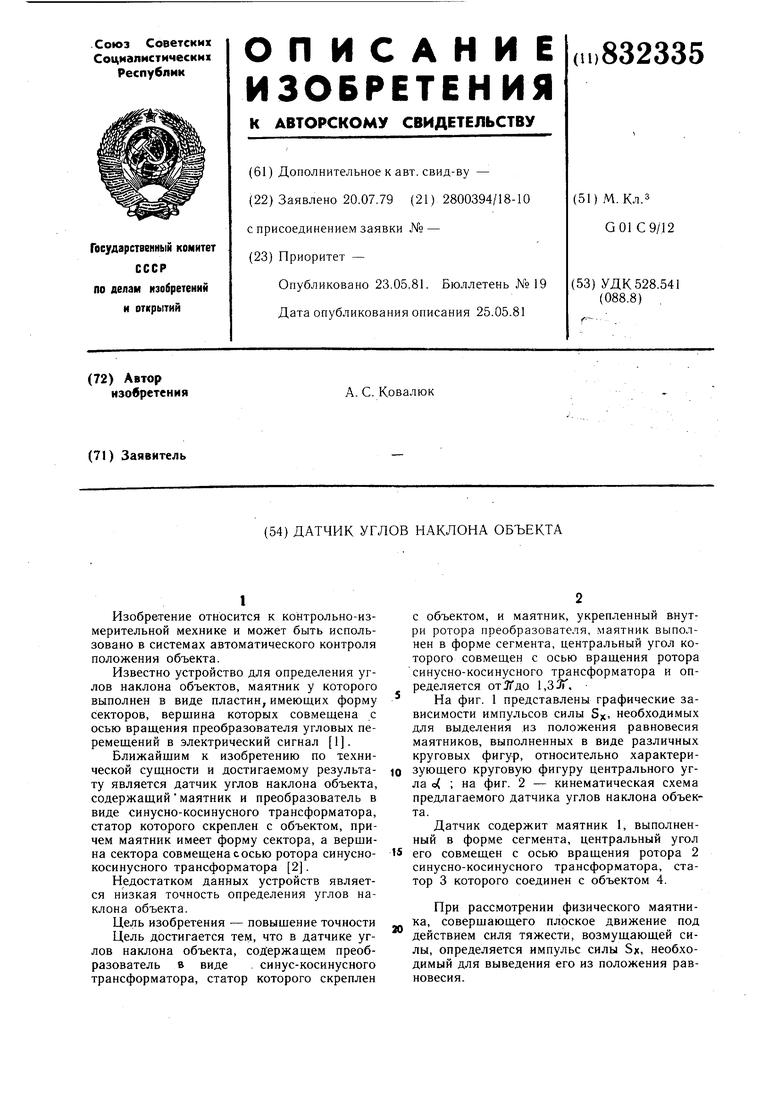

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ЗЕНИТНОГО УГЛА СКВАЖИННОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2252313C2 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2111454C1 |
| Датчик угла наклона объекта | 1990 |
|
SU1747872A1 |
| Трехосный гиростабилизатор киноаппарата | 1981 |
|
SU979855A1 |
| Устройство для контроля комплекса параметров траектории скважин и угла установки отклонителя бурового инструмента | 1982 |
|
SU1078041A1 |
| Устройство для контроля зенитных углов и положения отклонителя в скважине | 1983 |
|
SU1155733A1 |
| СПОСОБ ФОРМИРОВАНИЯ ФУНКЦИОНАЛЬНЫХ-ИНТЕГРАЛЬНЫХ-ДИФФЕРЕНЦИРОВАННЫХ КВАДРАТУРНЫХ ОПОРНЫХ СИГНАЛОВ | 2014 |
|
RU2549115C1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2112876C1 |
| Датчик положения ротора | 2023 |
|
RU2816167C1 |
| УСТРОЙСТВО РАДИАЛЬНО-КРУГОВОЙ РАЗВЕРТКИ ИНДИКАТОРОВ КРУГОВОГО ОБЗОРА СУДОВЫХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 1980 |
|
SU1840930A1 |
I
Изобретение относится к контрольно-измерительной мехнике и может быть использовано в системах автоматического контроля положения объекта.
Известно устройство для определения углов наклона объектов, маятник у которого выполнен в виде пластин, имеющих форму секторов, вершина которых совмещена с осью вращения преобразователя угловых перемещений в электрический сигнал 1.
Ближайщим к изобретению по технической сущности и достигаемому результату является датчик углов наклона объекта, содержащий маятник и преобразователь в виде синусно-косинусного трансформатора, статор которого скреплен с объектом, причем маятник имеет форму сектора, а верщина сектора совмещена tосью ротора синуснокосинусного трансформатора 2.
Недостатком данных устройств является низкая точность определения углов наклона объекта.
Цель изобретения - повышение точности
Цель достигается тем, что в датчике углов наклона объекта, содержащем преобразователь в виде . синус-косинусного трансформатора, статор которого скреплен
с объектом, и маятник, укрепленный внутри ротора преобразователя, маятник выполнен в форме сегмента, центральный угол которого совмещен с осью вращения ротора синусно-косинусного трансформатора и определяется от1/Гдо 1,3 ЗГ.
На фиг. 1 представлены графические зависимости импульсов силы Sx, необходимых для выделения из положения равновесия маятников, выполненных в виде различных круговых фигур, относительно характеризующего круговую фигуру центрального угла о( ; на фиг. 2 - кинематическая схема предлагаемого датчика углов наклона объекта.
Датчик содержит маятник 1, выполненный в форме сегмента, центральный угол
его совмещен с осью вращения ротора 2 синусно-косинусного трансформатора, статор 3 которого соединен с объектом 4.
при рассмотрении физического маятника, совершающего плоское движение под действием силя тяжести, возмущающей силы, определяется импульс силы Sx, необходимый для выведения его из положения равновесия.
Применяя для движущегося маятника теоремы об изменении количества движения и об изменении кинетической энергии, выводится вдражение, определяющее импульс силы, необходимый для выведения маятника из равнов ия, имеющее вид
),
где о( -центральный угол круговой фигуры маятника.
Графическое представление выражения отображено на фиг. 1, откуда видно, что центральный угол J. при верщине сегмента должен выбираться из неравенства ( а максимальный импульс силы, необходимый для выведения маятника из положения равновесия для круговых форм маятника, присущ сегменту с центральным углом сХ 1,16,
Датч1 к тлов наклона объекта работает следующим образом.
При наклоне объекта 4 статор 3, скрепленный с ним, поворачивается относительноротора 2 синусно-косинусного трансформатора, соединенного с маятником 1, сохраняющим свое постоянное положение в пространстве. В результате этого с выхода синусно-косинусного трансформатора снимается изменяющийся электрический сигнал, соответствующий измеряемым углам наклона объекта.
JT 7,/б5Г
Использование в датчике углов наклона объекта маятника, выполненного в форме сегмента с центральным углом Л, совмещенным с осью вращения ротора синусно-косинусного трансформатора и определяемым из неравенства .,iJl , позволяет повысить точность преобразования углового перемещения в электрический сигнал, так как у такого датчика маятник обладает повыщенным собственным восстанавливающим импульсом силы.
Формула изобретения
Датчик углов наклона объекта, содержащий преобразователь в виде синус-косинусного трансформатора, статор которого скреплен с объектом, и маятник, укрепленный внутри ротора этого преобразователя, отличающийся тем, что, с целью повышения точности, маятник выполнен в форме сегмента, центральный угол которого совмещен с осью вращения ротора синусно-косинусного трансформатора и определяется от-ЭГдо 1,3 Jr.
Источники информации,
принятые во внимание при экспертизе
ot. (радиан)
//////Л
Фы2.2.
