(54) ДИНАМОМЕТР
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМОМЕТР | 1992 |
|
RU2043608C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТВЕРДОСТИ МАТЕРИАЛОВ МЕТОДОМ ЦАРАПАНИЯ | 2008 |
|
RU2373515C1 |
| Универсальная машина для испытаний материалов на кручение | 1959 |
|
SU148939A1 |
| Магнитоэлектрический динамометр | 1984 |
|
SU1182285A1 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА-ОПЕРАТОРА ТРАНСПОРТНОГО СРЕДСТВА И САМОХОДНОЙ ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ И КОМПАКТНАЯ ПОДВЕСКА СИДЕНЬЯ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2010 |
|
RU2438888C1 |
| Устройство для демонстрации изгиба стержня | 1984 |
|
SU1226514A1 |
| Устройство для контроля зажимного усилия кулачковых патронов | 1983 |
|
SU1136038A1 |
| РУЧНОЕ УСТРОЙСТВО ДЛЯ УСТРАНЕНИЯ ЗАСОРОВ В КАНАЛАХ ЗАМКНУТОГО ПЕРИМЕТРА | 2007 |
|
RU2333048C1 |
| Устройство для контроля твердости болтов | 1959 |
|
SU128186A1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ПАРАМЕТРОВ ЦЕПНОГО ЗАТВОРА ДЛЯ РУДОСПУСКА | 2008 |
|
RU2381566C1 |
1
Изобретение относится к образцовым переносным силоизмерительным приборам, предназначенным для поверок показаний силоизмерительных устройств испытательных маыин, прессов, работающих по статическому циклу нагружения,
Известен динамометр, в упругом теле которого выполнено отверстие через которое проходит игла, связывающая перемещающиеся друг относительно друга пластины, в одной из которых закреплен индикатор, а в другой - винт с коническим углублением l.
Наиболее близким к изобретению по технической сущности является динамометр, который имеет упругое тело, выполненное в виде трех верткальных стержней прямоугольного сечения с ломаной осью, связанных друг с другом олорными нерабочими окончаниями,а к выступам стержн приварены пластины (флажки), концы которых при сжатии сближаются, а при растяжении расходятся. Тако упругое тело используется при измеряемом усилии до 20ТС. При увеличении измеряемой силы свыше 20 Тс
до 1000 Тс упругое тело усиливается полым стэржнем круглого сечения. .
Система измерения перемещения пластин состоит из индикатора часового типа и механизма преобразования перемещений, который состоит из двух двухповодковых групп (диад). Два звена механизма опираются на перемещающиеся пластины, а третье звено,
0 суммируя перемещение всех трех пластин, передает его на измерительный стержень индикатора, закрепленного на третьей пластине. Звенья механизма преобразования перемещений про5ходят через специальные отверстия в упругом теле динамометра 2..
Недостатками этих динамометров являются необходимость ослабления опасного сечения упругого тела ди0намометра отверстиями, в результате чего снижается предел измерения динамометра, либо увеличиваются размеры упругого тела, а также из-за расположения механизма преобра5зования перемещений внутри упругого тела,невозможно использовать внутреннее пространство динамометра
Цель изобретения - повышение 30 предела измерения динамометра.
Поставленная цель достигаета тем, что механизм преобразования перемещений выполнен в виде замкнутой кинематической цепи, охватывающей упругое тело снаружи по его периметру и состоящей из трехповодковых и двухповодковых групп.
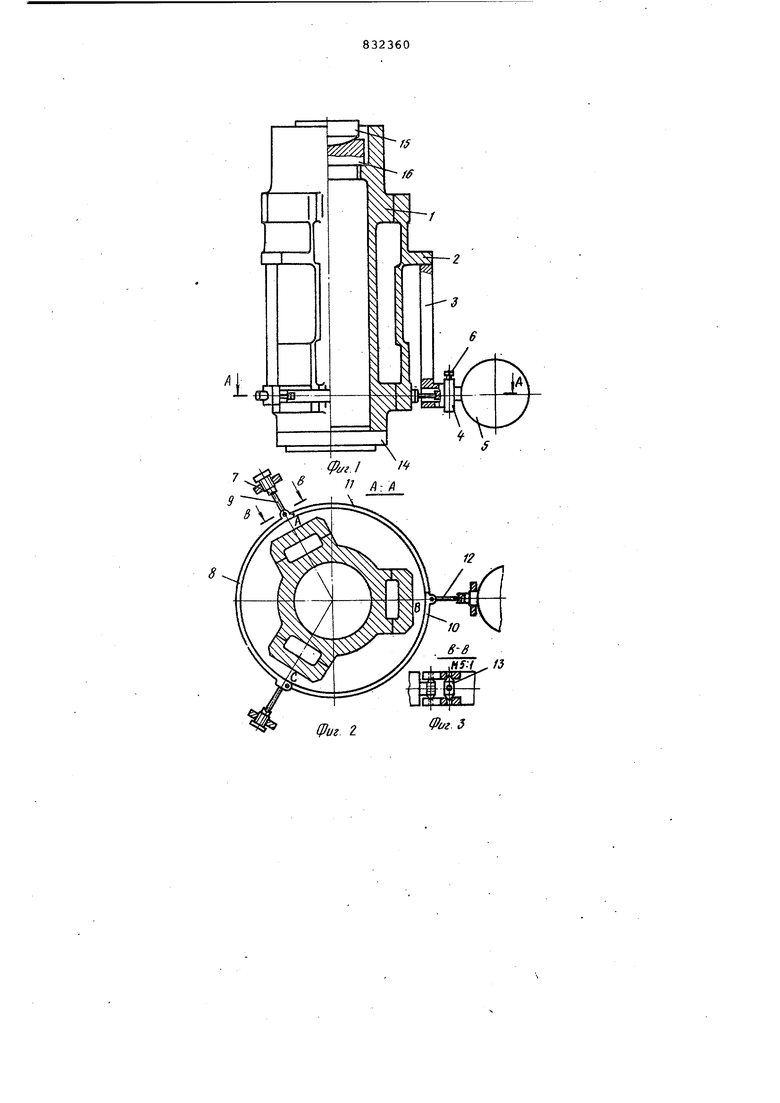
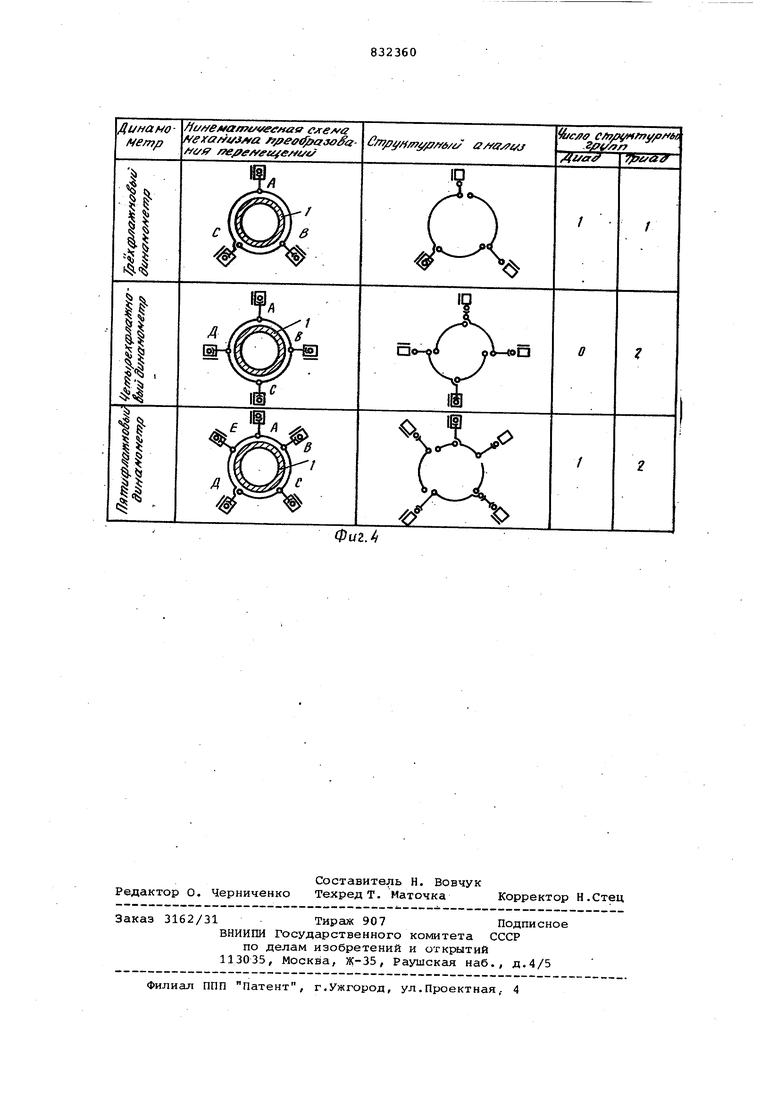
На фиг.1 изображен динамометр, общий вид, на фиг. 2 - разрез А-А на фиг.1; на фиг.З - разрез В-В на фиг.2; на фиг.4 - кинематические схемы механизмов преобразования перемещений 3-5-флажковых динамометров.
Устройство содержит упругое тело 1 выполненное в виде полого цилиндра, к которому приварены три стержня 2 прямоугольного сечения с ломаной осью. В точках перегиба упругих кривых стержней расположены выступы. К ним жестко крепятся флажки 3. Свободный конец одного из флажков выполнен в виде разрезной втулки, на которую надет хомутик 4. В разрезную втулку вставляют индикатор 5 с наконечником, имеющим коническое углубление.
Индикатор фиксируется в разрезной втулке с помощью винта 6. В свободные конщд двух других флажков ввернуты винты 1, имеющие конические углубления. На винты и наконечники индикатора опираются опорные звенья механизма преобразования перемещений. Механизм преоразования перемещений (фиг.2 состит из триады, в которую, кроме флака, входят звенья 8-10 и диады, состоящей из звеньев 11 и 12.
Звенья механизма преобразования перемещений соединяются между собой в замкнутую кинематическую цепь ЛВС с помощью игл 13.
Динамометр снабжен нижней плоской опорой 14 и верхней сферической опорой 15, опирающейся на сферическую подставку 16.
При нагружении динамометра упругое тело под действием приложенного усилия деформируется так, что приваренные к нему пластины 2 сближаются. Механизм преобразования перемещений через звенья 8-12-передает перемещение пластин 2 на, индикатор 5.
Силовой Поток проходит через сфе г ческую опору 15, подставку 16, упругое тело и нижнюю плоскую опору 14, не образуя при своем движении концентрации напряжений силового поля.
Использование механизма преобразования перемещений в виде замкнутой кинематической цепи позволяет расположить механизм преобразования перемещений снаружи полого цилиндра упругого тела, что исклю.дает отверстия в упругом теле и
освобождает внутреннее пространств динамометра для других целей (например, вторичной аппаратуры). Использование замкнутой кинематической цепи позволяет увеличить число флажков до , что приводит к повышению чувствительности динамометра и снижению его веса.
Повышение предела измерения динамометра или соответственно снижение его веса достигается за счет увеличения площади опасного сечения упругого тела на величину площади диаметрального сечения отверстий, а также за счет снижения неравномерности распределения напряжений по опасному сечению, вследствие исключения концентратора напряжений в виде отверстий, ослабляющих опасное сечение в 1,52 раза.
Таким образом, механизм преобразования перемещений позволяет увеличить несущую способность опасного сечения в 1,5-2 раза и соответственно повысить предел измерения силы, а также снизить вес динамометра при заданном пределе измерения на 10-20%.
Повышение предела измерения возможно при использовании в динамометре нового механизма преобразования перемещений в виде замкнутой кинематической цепи, состоящей из двухповодковых групп (диад) и трехповодковых групп (триг При нечетном числе флажков число триад равно , а число диад рав При четном числе флажков
единице
число триад равно - , а число
диад равно нулю.
Формула изобретения Динамометр, содержащий упругое тело, выполненное из стержней прямоугольного сечения с ломаной осью и флажком каждый, индикатор перемещения,закрепленный на одном из флажкоБ, и механизм преобразования перемещений из подвижных звеньев, оканчивающихся игольчатыми окончаниями , одно из которых соединено с измерительным стержнем индикатора, а другие с остальными флажками, отличающийся тем, что, с целью расширения диапазона измерения силы, механизм преобразования перемещения выполнен в виде замкнутой кинематической цепи, охватывающей упругое тел снаружи по его периметру и состоящей из трехповодковых и двухповодковых групп.
Источники информации, принятые во внимание при экспертиз
№ 2541.65, кл. G 01 L 1/04, 16.05.7
i
фиг. г
Фаг. 5
1///ема/г7г/«е мая f/ffKaf///JA fa /fjyefftfoaja af/ ff /xj e/vee e/ e/f/
cfo C/r /y fny/o/ 6f,
a/ta e/j -Zjpy/fh
Д1/а
If
ч
i I
Л
«
il
s л
s
I
г
il It
If II
II
c|
