Известны устройства для контроля твердости болтов путем определения глубины вдавливания шарика при помощи индикатора. В устройствах применен пресс типа Бринеля.
Отличительная особенность описываемого устройства заключается в том, что оно снабжено бункером с дисковым подающим механизмом, а также индикаторной приставкой с индуктивным датчиком. Датчик включен в схему управления соленоидными приводами сортирующего приспособления.
Такое выполнение устройства обеспечивает автоматизацию контроля
твердости.
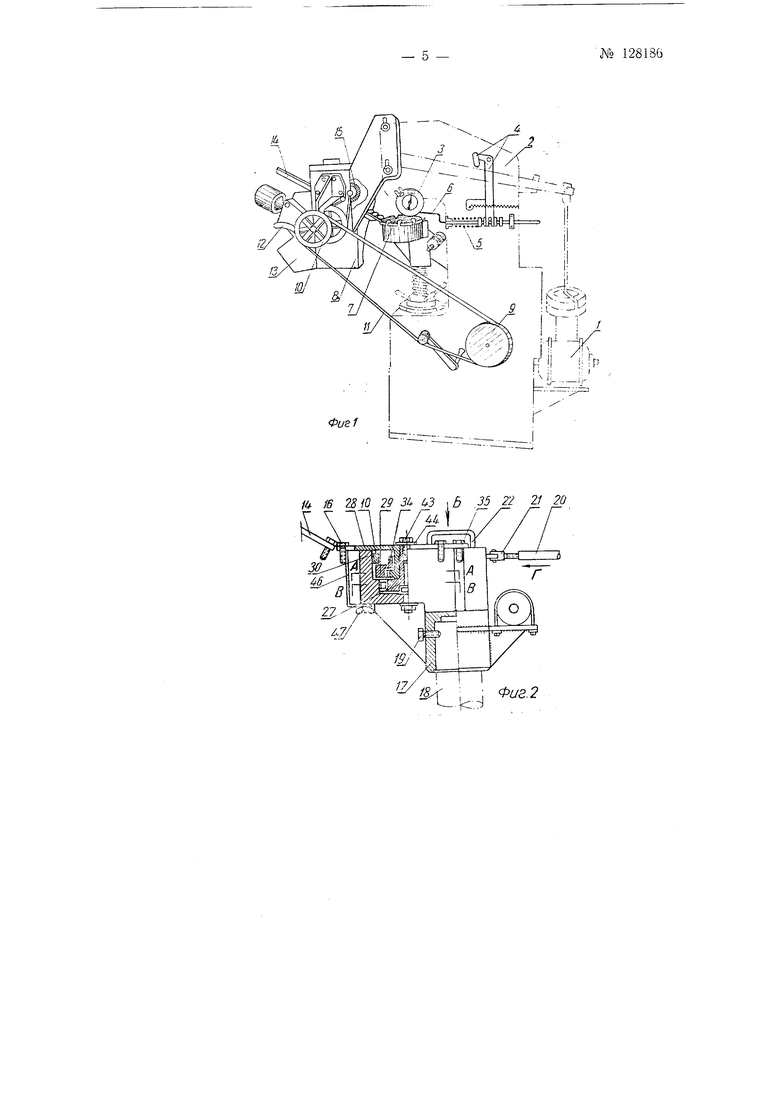
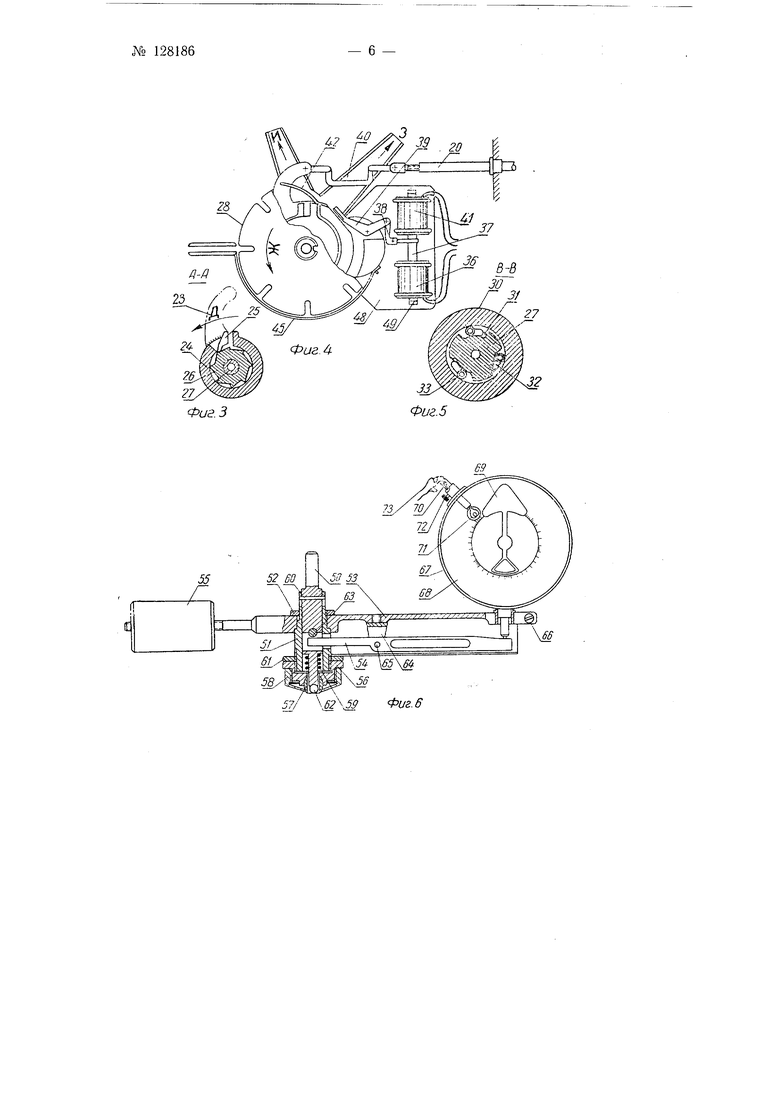
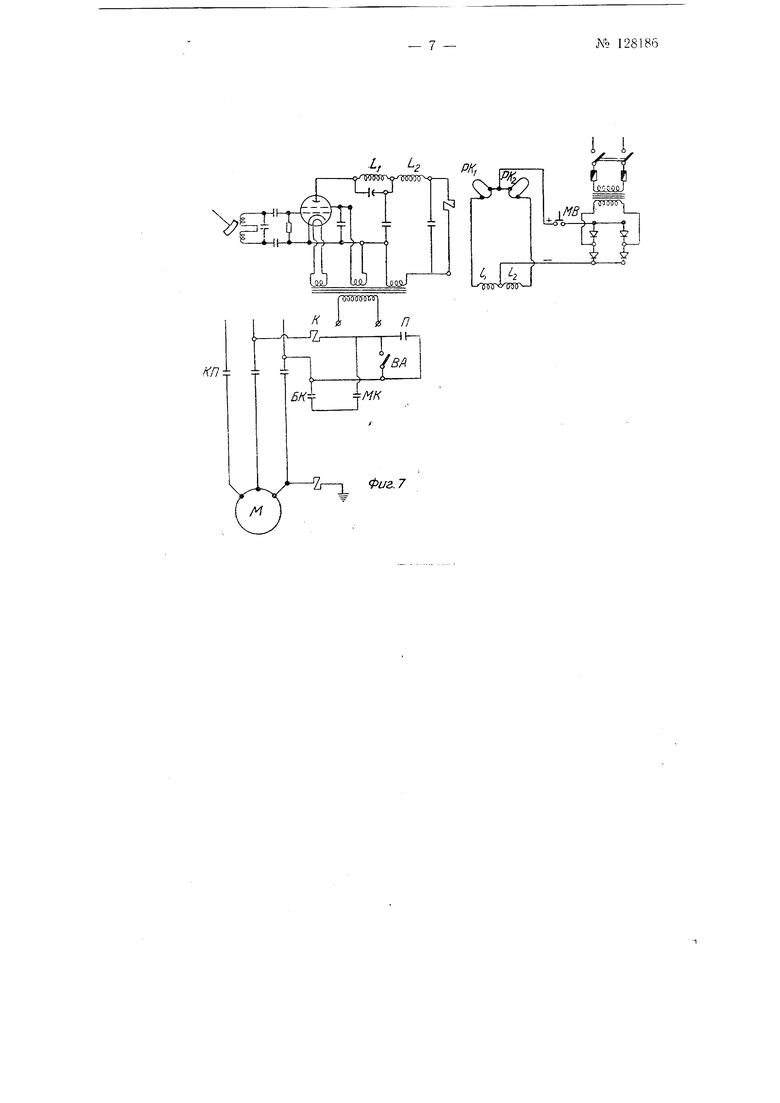
На фиг. 1 схематически изображено устройство в общем виде; на фиг. 2 показан подающий механизм бункера; на фиг. 3 изобралсено сечение по А-А на фиг. 2; на фиг. 4 - вид по стрелке Б на фиг. 2; на фиг. 5 -сечение по В-В на фиг. 2; па фиг. 6 - пндикаторная приставка; на фиг. 7 - электрическая схема устройства.
Подача болтов под щарик, давление на него, контроль твердости и отбраковка несоответствующих техническим условиям деталей в описываемом устройстве автоматизированы.
Обязанности работника, обслуживающего устройство, сводятся к запуску электрического двигателя привода, загрузке в бункер и извлечениюих из соответствующих ячеек годных и забракованных изПосле включения электрического двигателя 1 (фиг. 1) рычаг 2 нагрузки, опускаясь, передает давление на шпиндель (шпиндель на чертеже условно не показан).
На щнинделе укреплена индикаторная приставка, например, типа КЛД-1 с индуктивным датчиком 5, шарик которой внедряют в металл
№ 128186
испытываемого болта. Одновременно рычаг 4 под действием иружииы перемещает тягу 6 вправо.
При поднятии рычага 2 ыач.чнается разгрузка шпинделя. Рычаг 2, не достигнув своего исходного положения, производит нажим на коро-кое плечо рычага 4, который, перемещаясь, передвигает тягу 6 влево. Тяга 6 поворачивает диск 7 на 45°; при этом происходит подача под шарик следующего болта, и цикл повторяется.
Болты, подвергаемые контролю, загружаются внавал в бункер 8. Привод подающего механизма бункера осуществляют с помощью шкявов 9 к 10 к клинообразного ремня 11.
Шкив 9 закрепляют на специально удлиненном вале редуктора пресса.
При помощи кривошинно-щатунной передачи 12 захват 13 получает возвратно-поступательное движение, захватывает в бункере болты и закладывает их в продольный паз наклонных нанравляющих 14.
Болты, непопавшие в паз, сбрасываются в бункер зубчатым колесом /5, приводимым во вращение круглоременной передачей.
Все узлы устройства монтируются на корпусе станины пресса Бринеля, например, типа ГЗИП.
Подающий механизм осуществляет съем болтов 16 (фиг. 2) с направляющих 14 бункера и подачу их на контроль твердости под шарик индикаторной приставки с индуктивным датчиком.
Кроме того, механизм сбрасывает болты с неудовлетворительными значениями твердости в лоток бракованных изделий.
Подающий механизм смонтирован на корнусе 17, который устанавливают на подъемном винте /6 пресса и зажимают болтом 19.
В момент окончания снятия нагрузки на шарик происходит неремоигение тяги 20 влево, по направлению стрелки Г. На конце тяги 20 навинчена регулировочная вилка 21, шарнирно связанная с поводком 22, который поворачивает рычаг 23 (фиг. 3) по направлению стрелки Д. Рычаг 23 жестко связан с обоймой 24, на которой укреплена собачка 25. Собачка 25 входит в зацепление с храповнком 26 и поворачивает полуось 27. На этой полуоси установлен подающий сменный диск 2S, который поворачивается на в направлении стрелки Ж (фиг. 4) и тем самым обеспечивает подачу следующего болта на испытание.
Затем рычаг 23 возвращается в исходное положение, причем диск 28 остается неподвижным, так как собачка 25 скользит по соответствующему зубу храповика 26.
Сдвиг диска в обратном нанравлении иод воздействием обоймы 29 исключен благодаря специальиому стопорному устройству. Устройст1зо расположено в нижней части корпуса 30 и обеспечивает свободный новорот полуоси 27 против часовой стрелки, так как пружины 5/ (фиг. 5) сжимаются под воздействием сухарика 32 и ролика 33.
При этом движение по часовой стрелке невоз.можно, так как ролик 33 заклииивается между стенкой корпуса 30 и фасонным пазом нолуоси 27. Фрикционное текстолитовое кольцо 34 предотврап1ает поворот диска 28 при движении но инерции.
Одновременно с отходом рычага 23 в исходное положение шарик внедряется иод действием нагрузки в головку болта ,5, и производится контроль твердости.
В случае если твердость болта не соответствует техническим условиям, т. е. если она выше или ниже требуемой, срабатывает соленоид 36. Сердечник 37 соленоида, связанный с помощью серьги 38 с затворо.м 39, втягивается внутрь и устанавливает последний на пути движения болта при последующем повороте диска.
Болт после упора в затвор 39 падает в лоток 40, скользит по направлению стрелки 3 и попадает в ячейку для бракованных болтов.
Если же твердость болта находится в пределах технических требований, то срабатывает соленоид 41, сердечник 57 втягивается в него, и затвор 39 убирается с пути движения болта.
При повороте диска болт не выпадает из иаза и только при следуюндем повороте, наткнувшись на ограничитель 42, падает в лоток и ско.чьзит по направлению стрелки И, после чего попадает в ячейку для годных болтов.
При переходе на другой диаметр болта наладка подающего механизма осуществляется заменой диска 2S, причем для этого достаточно слегка отвинтить болт 43 и извлечь разрезную щайбу 44.
Пружинный прижи.м 45 предохраняет болты от выскакивания из пазов. От заклинивания болтов при повороте диска предохраняет упор 46, положение которого регулируется гайкой 47.
Соленоиды ненодвижно установлены на кронштейне 48, а регул.ировка хода сердечника 37 производится винтами 49.
Измерение твердости болтов производится без снятия нагрузки замером глубины лунки, выдавливаемой н ариком.
Процесс нагрзжения щарика и замер величины твердости совмещены в одном цикле.
Смещение и деформация корпуса устройства, подъемного винта и подающего механизма не искажают результатов контроля, что обеспечивается конструкцией индикаторной приставки.
При приложении нагрузки стержень 50 (фиг. 6) неремещается, увлекая за собой обойму 51, на которой с помощью гайки 52 укреплен корпус 53, внутри которого находится рычаг 54, а также установлены индикатор с индуктивным датчиком и противовес 55.
На обойму 5 навинчена оправка 56, в которую вставлена пшровая опора 57, удерживаегмая гайкой 58.
Пружина 59 в исходном состоянии прижимает обойму 51 к нгни.льке 60.
Оправка 56 фиксируется контр-гайкой 61 в положении, при кого1)ом торцовая плоскость шаровой опоры 57 касательна к поверхности шарика 62.
В момент соприкосновения с поверхностью испытываемо головки болта движение обоймы 51 прекращается, в то время как стержень 50 с укрепленным на его конце щариком 62 надавливает под возде| 1стви м нагрузки на головку болта.
Пружина 59 сжимается, а шпилька 60 скользит по прорезям обоймы 51. При этом жестко укрепленная на стержне 50 призма 63 нажимает на короткое плечо рычага 54, щарнирно укрепленного на кронштейне 64 и лсестко связанного с корпусом 55.
Рычаг 54 поеорачивается вокруг оси 65 и концом длинного п.чеча нажимает на стержень индикаторной головки, укрепленной iia корпусе 53 при помощи зажимного винта 66.
Стрелка индикатора показывает только величину смепгения стержня 50 относительно обоймы 51, осуществляя таким образом диффсре:циальный замер глубины отпечатка, исключающий влияние деформации и смещение станины и узлов на показание прибора.
Непараллельность плоскости испытываемой головки болта компенсируется поворотом щаровой опоры 57 в пределах 5° и не отражается на результатах измерения.
На индикаторной головке закреплен корнус 67, имеющий возможность поворачиваться относительно шкалы 68, которая в свою очередь ЛЮжет быть повернута относительно центра стрелки 69.
№ 128186
№ 128186- 4 -
Трапецеидальная форма флажка этой стрелки позволяет при перемещении стержня 70 индуктивной катушки 71 в муфте 72 изменять интервал допустимых отклонений твердости от номинала. Провода 73 от индуктивной катушки подключаются к генератору высокой частоты.
Цикл автоматической работы устройства начинается после включения выключателя ВА (фиг. 7), при этом включается катушка К магнит ного пускателя и контактами К.П подключается к сети электрический двигатель М.
Контакт БК замыкает цепь, блокирующую выключатель RA. Контакт МК замкнут внутри пресса.
При поштучной работе пресса пуск двигателя Л1 осуществляется ножной педалью П. В этом случае, по окончании цикла, пресс размыкает контакт М/С, и двигатель останавливается.
Принцип действия прибора, управляющего соленоидами в соответствии с импульсами, полученными от индуктивного датчика, основан на изменении индуктивности катушек сеточных контуров при входе н выходе флажка-экрана из зазора между секциями этих катушек, так как величина их индуктивности определяет наличие или отсутствие генерации задающего генератора.
Схема генератора настраивается таким образом, что при входе флажка в зазор между секциями катушек генератора L и L, он самовозбуждается и генерирует колебания высокой частоты. При этом, вследствие появления сеточного тока, на сетку лампы подается отрицательный потенциал, в результате чего анодный ток резко падает, приводя к отпусканию реле, выключению одного ртутного контакта РК и включению другого РК.
Переключение ртутных контактов РК и PKz управляет работой соленоидов /1 п /9, питаемых постоянным током от селенового выпрямителя.
В цепи соленоидов установлен микровыключатель MB, включающий цепь при помощи кулачка, устаповленного на оси кривошипа нресса, только в момент измерения твердости.
Вследствие этого при возвращении стрелки-флажка в исходное положение переключение соленоидов исключается.
Предмет изобретения
Устройство для контроля твердости болтов нутем определения с помощью индикатора глубины вдавливания шарика, с применением пресса типа Бринеля, отличающееся тем, что, с целью автоматизации контроля твердости, оно содержит бункер с дисковым подающим механизмом, индикаторную приставку с индуктивным датчиком, включенным в схему управления соленоидными приводами сортирующего приспособления.
/i
Фиё1
fcr
| название | год | авторы | номер документа |
|---|---|---|---|
| Индикаторная приставка к прессу Бринелля | 1959 |
|
SU139125A1 |
| Устройство для размагничивания мелких деталей | 1961 |
|
SU144909A1 |
| Устройство для транспортирования и подключения электроэлементов к измерительной аппаратуре | 1973 |
|
SU498230A1 |
| СЕЛЕКЦИОННЫЙ КОМБАЙН С УСТРОЙСТВОМ ДЛЯ УЧЕТА СОБРАННОЙ МАССЫ | 1992 |
|
RU2045149C1 |
| Устройство для автоматической сборки составных частей химических источников тока | 1991 |
|
SU1790016A1 |
| Массообменное устройство для контакта твердой и жидкой фаз | 1990 |
|
SU1780799A1 |
| Комплект унифицированных стоечно-корпусных принудительно-микровибрационных приводов модельных сборок со сменными почвообрабатывающими дисковыми орудиями и рабочими частями "ВИКОСТ" | 2016 |
|
RU2654869C1 |
| Стенд для проведения испытаний рабочих органов сельскохозяйственных машин | 1991 |
|
SU1783349A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2007 |
|
RU2361750C2 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ИЗНОШЕННЫХ ПОВЕРХНОСТЕЙ ЦИЛИНДРОВ, ТРУБ С ПОМОЩЬЮ НАНЕСЕНИЯ ПОКРЫТИЯ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2213653C2 |
/4 nju 29 31 « b 35 22 2/ 20
Ш
;
7/ W Фиг. 6
27
. -,56
L, L,
PK, ЙРS
-Tj11-IH
,1 i I
.i-I
/7
