1. Область техники, к которой относится изобретение
Изобретение относится к гироскопической технике и может быть использовано для статической балансировки рам гиростабилизатора на этапе его изготовления.
Применение гиростабилизаторов в высокоманевренных изделиях требует минимизации остаточного дисбаланса рам гиростабилизатора, в связи с этим перед разработчиками стоит задача повышения точности определения параметров дисбаланса изделий без ограничений по их массе, снижения трудоемкости балансировочных операций.
2. Уровень техники
Рассмотрим аналоги предлагаемого изобретения.
2.1. Библиографические данные аналогов изобретения
[1] Детали и узлы специальных приборов. Атлас конструкций. Под ред. А.С. Васильева. М., Машиностроение, 1975, с. 207.
[2] Moment determining device. Патент США №3064469 А. Автор Price Leo.
[3] Лавров С.А. О статической балансировке специальных приборов. Авиационная промышленность: научн.-произв. журн. М., Авиапром. СССР, 1973, №1, с. 25-27.
2.2. Известны методы измерения дисбаланса рам гиростабилизатора путем его сравнения с моментом, создаваемым грузом на подвижной платформе с установленным на ней гиростабилизатором, а также методом непосредственного измерения дисбаланса с помощью каких-либо моментомеров [1]. Измерение дисбаланса осуществляется на специальных балансировочных устройствах, содержащих подвижную платформу, установленную на основание при помощи каких-либо опор (упругих, призматических и др.), датчик поворота платформы относительно основания и устройства измерения и индикации неуравновешенности [2]. Недостатком этих методов является низкая чувствительность, обусловленная моментом сил сухого трения в подвесе платформы, низкая производительность, сложность автоматизации процесса измерения дисбаланса.
Наиболее близким к заявляемому аналогом (прототипом) является способ определения дисбаланса при помощи моментомера [3]. В данном техническом решении подвижная платформа установлена на основание при помощи двух цилиндрических газостатических опор, на оси платформы установлены электрические датчики угла и момента. Установка работает в режиме электрической пружины по методу непосредственного измерения момента, вызванного дисбалансом. Недостатком данного способа является необходимость применения сложного дорогостоящего оборудования, а также ограничение по массе балансируемого изделия.
3. Раскрытие изобретения
3.1. Техническим результатом предлагаемого изобретения является снятие ограничения по массе балансируемого изделия без применения дорогостоящего оборудования, повышение точности и чувствительности при измерении дисбаланса, снижение трудоемкости, повышение степени автоматизации балансировочных операций.
Технический результат достигается наличием существенного признака - использованием в качестве моментомера самого гиростабилизатора, а именно системы, включающей в себя датчик положения балансируемой рамы и соответствующий моментный двигатель, входящие в состав гиростабилизатора, а также вращения рамы гиростабилизатора с постоянной угловой скоростью при помощи этой системы.
Сущность изобретения заключается в том, что при вращении рамы с постоянной угловой скоростью в поле силы тяжести Земли при помощи системы, включающей в себя датчик положения балансируемой рамы и соответствующий моментный двигатель, в токе двигателя, пропорционального моменту сопротивления на его валу, содержится синусоидальный сигнал, амплитуда которого пропорциональна дисбалансу рамы, а его фаза соответствует углу расположения тяжелого места в системе координат, связанной с основанием, на котором установлен гиростабилизатор. Кроме того, измерение дисбаланса при вращении рамы устраняет момент трения покоя, который снижает точность и чувствительность при измерении дисбаланса традиционными методами.
3.2. Заявляемое изобретение направлено на решение задачи выделения сигнала, пропорционального дисбалансу рамы гиростабилизатора, из величины тока, протекающего в цепи питания моментного двигателя при вращении им рамы гиростабилизатора с постоянной угловой скоростью.
Для решения этой задачи производят измерение тока в цепи питания моментного двигателя при вращении рамы гиростабилизатора с постоянной угловой скоростью за полный оборот в поле силы тяготения Земли при горизонтальном положении оси рамы и получают зависимость тока как функцию от угла положения рамы в системе координат, связанной с основанием. В случае отсутствия возможности поворота рамы на полный оборот, данную функцию получают из нескольких фрагментов, производя переустановку корпуса гиростабилизатора на основании в несколько положений, в зависимости от угла, на который имеется возможность поворота рамы. Полученную таким образом функцию подвергают математической обработке при помощи алгоритма квадратурного детектирования и выделяют амплитуду и фазу тока, зависящего от дисбаланса в полярных координатах, либо значения тока как проекции дисбаланса на оси декартовой системы координат. Решение данной задачи обеспечивает снятие ограничения по массе балансируемого изделия без применения дорогостоящего оборудования, повышение точности и чувствительности при измерении дисбаланса, снижение трудоемкости, повышение степени автоматизации балансировочных операций.
Существенные признаки, характеризующие предлагаемое изобретение и общие с прототипом [3]: измерение момента, создаваемого дисбалансом, при помощи моментомера при горизонтальном положении оси балансируемой рамы. Существенные признаки, характеризующие предлагаемое изобретение и отличающиеся от прототипа: установка гиростабилизатора на неподвижное основание, вращение балансируемой рамы гиростабилизатора с постоянной угловой скоростью при помощи привода, состоящего из датчика положения рамы и моментного двигателя, измерение момента на валу в привязке к углу положения рамы относительно вектора силы тяжести и вычисление дисбаланса рамы по специальному алгоритму.
4. Осуществление изобретения
4.1. Предложенный способ измерения дисбаланса реализуют следующим образом.
Гиростабилизатор устанавливают на основание так, чтобы ось вращения балансируемой рамы была горизонтальна. Раму приводят во вращение приводом, включающем в себя датчик положения рамы и соответствующий моментный двигатель, с постоянной угловой скоростью в диапазоне от 1 до 10 °/с. Производят сбор массива данных зависимости тока в цепи питания моментного двигателя от угла поворота рамы J(ϕ), ϕ=0…360°. Период дискретизации по углу поворота должен находиться в пределах от 0,5° до 5°. Данные передают в компьютер, где подвергают обработке по алгоритму квадратурного детектирования:
- массив данных по току в цепи питания двигателя J(ϕi) преобразуют в два массива:

где n - количество измерений тока за один период вращения рамы;
- находят средние значения массивов:
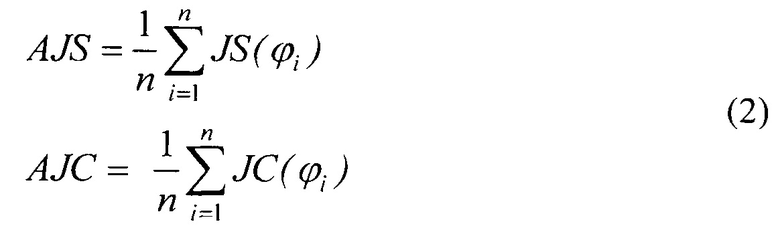
Значения AJS и AJC представляют собой проекции дисбаланса на оси выбранной декартовой системы координат, выраженные в размерности тока в цепи питания моментного двигателя.
Для определения абсолютного значения дисбаланса вычисляют

Для определения угла расположения несбалансированной массы вычисляют

Для определения значений дисбаланса в размерности момента предварительно проводят калибровку измерительной системы при помощи контрольных грузов и определяют коэффициент передачи моментного двигателя. Используя полученные значения дисбаланса, производят балансировку рамы гиростабилизатора известными методами.
В случае когда угловое движение рамы ограничено упорами на угле прокачки ±ϕу, измерение дисбаланса при помощи предлагаемого способа производят следующим образом.
Гиростабилизатор устанавливают на основание так, чтобы ось вращения балансируемой рамы была горизонтальна. Раму приводят во вращение приводом, включающим в себя датчик положения рамы и соответствующий моментный двигатель, с угловой скоростью в диапазоне от 1 до 10 °/с. Производят сбор массива данных зависимости тока в цепи питания моментного двигателя от угла поворота рамы J1(ϕi) при изменении угла ϕ в пределах от минус ϕи до + ϕи, где ϕи<ϕy, ϕи=π/k, k - целое число. Корпус гиростабилизатора поворачивают на угол 2ϕи вокруг оси балансируемой рамы. Производят сбор массива данных зависимости тока в цепи питания моментного двигателя от угла поворота рамы J2(ϕi) при изменении угла ϕ в пределах от минус ϕи до + ϕи. Повторяют разворот корпуса гиростабилизатора на угол 2ϕи вокруг оси балансируемой рамы и сбор данных до получения массива данных Jk(ϕi). Производят объединение полученных массивов в один массив

при этом к значениям аргумента второго массива прибавляют угол 2ϕи, к значениям аргумента третьего массива прибавляют угол 4ϕи и т.д. до получения значений аргумента объединенного массива в пределах от 0° до 360°, т.е. переводя значения аргумента в систему координат, связанную с основанием.
Параметры дисбаланса вычисляют по формулам (1-4).
4.2. Если представить дисбаланс рамы как произведение заранее не известной несбалансированной массы m на радиус ее расположения r, то в поле тяготения Земли при повороте рамы относительно корпуса гиростабилизатора, установленного на неподвижное основание, на угол ϕ, отсчитываемый от вертикали, этот дисбаланс будет создавать момент относительно оси рамы

где ψ - заранее не известный угол расположения несбалансированной массы m в системе координат, связанной с основанием. Соответственно в цепи питания двигателя будет протекать ток

где М0 - момент сопротивления в опорах рамы,
b - коэффициент передачи моментного двигателя, определенный при калибровке с помощью контрольных грузов.
Как видно из (9), при вращении рамы с постоянной угловой скоростью, ток в цепи питания двигателя изменяется по синусоидальному закону на фоне тока, обусловленного моментом сопротивления в опорах рамы. Задача состоит в выделении из этого сигнала абсолютного значения дисбаланса mr и угла расположения несбалансированной массы ψ.
Подставляя выражение для тока, обусловленного дисбалансом (9) в формулу (1), получим:
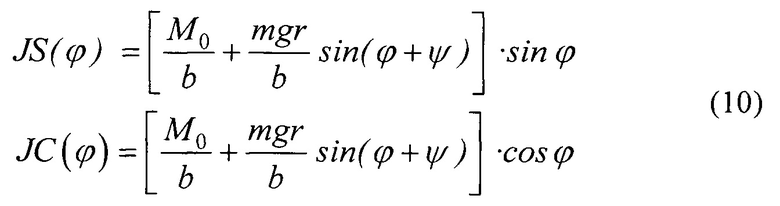
Опуская тригонометрические преобразования и заменяя суммирование на интегрирование, проекции дисбаланса на оси декартовой системы координат определятся по формулам (2):
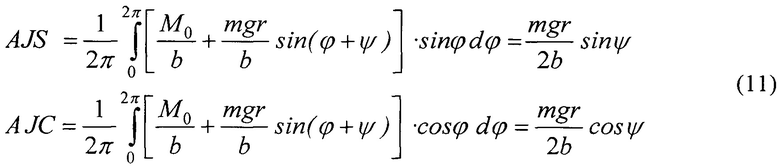
Как видно из формул (11), алгоритм квадратурного детектирования выделил из сигнала только часть, зависящую от дисбаланса рамы, исключив влияние момента сопротивления в опорах рамы, за счет чего достигается повышение чувствительности при использовании заявляемого способа. Абсолютное значение дисбаланса по формуле (3) определится:

Угол положения несбалансированной массы в выбранной системе координат по формуле (4) определится:
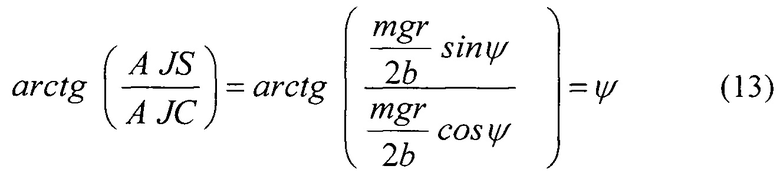
Таким образом, используя алгоритм квадратурного детектирования, по формулам (1-4), можно определить абсолютное значение дисбаланса mr и угол расположения несбалансированной массы ψ рамы гиростабилизатора, используя информацию о токе питания двигателя в зависимости от угла поворота рамы гиростабилизатора в поле силы тяжести Земли.
Применение заявленного способа позволит снять ограничение по массе балансируемого изделия без применения дорогостоящего оборудования за счет использования в качестве моментомера самого гиростабилизатора, повысить точность и чувствительность при измерении дисбаланса благодаря измерению момента на валу балансируемой рамы при ее вращении с постоянной угловой скоростью и квадратурного детектирования зависимости момента на валу от угла поворота рамы в поле силы тяжести Земли, снизить трудоемкость, повысить степень автоматизации балансировочных операций, т.к. измерение дисбаланса производится в автоматическом режиме.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БАЛАНСИРОВКИ РОТОРОВ | 2013 |
|
RU2548373C2 |
| СПОСОБ И УСТРОЙСТВО ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2000 |
|
RU2208772C2 |
| Автоматический балансировочный станок | 1985 |
|
SU1226089A1 |
| СПОСОБ БАЛАНСИРОВКИ ЭЛЕМЕНТОВ РОТОРНЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2485467C2 |
| СПОСОБ И УСТРОЙСТВО ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ КАРДАННЫХ ПЕРЕДАЧ | 2007 |
|
RU2353910C1 |
| СПОСОБ БАЛАНСИРОВКИ НЕСИММЕТРИЧНЫХ РОТОРОВ | 2006 |
|
RU2310177C1 |
| СПОСОБ ВЕРТИКАЛЬНОЙ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЯ | 2017 |
|
RU2674423C2 |
| СТЕНД ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ КОЛЕС | 1991 |
|
RU2036449C1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ | 1992 |
|
RU2054644C1 |
| ПОЛУАВТОМАТИЧЕСКИЙ БАЛАНСИРОВОЧНЫЙ СТАНОК | 2012 |
|
RU2515102C1 |
Изобретение относится к приборостроению и может использоваться при статической балансировке рам гиростабилизатора. При реализации способа измерение дисбаланса производится самим балансируемым гиростабилизатором при вращении его рам с постоянной угловой скоростью с помощью привода, включающего в себя датчик положения рамы и моментный двигатель, входящие в состав гиростабилизатора. Технический результат заключается в снятии ограничений на массу балансируемого гиростабилизатора, повышении чувствительности и точности измерений дисбаланса, снижении трудоемкости и повышении степени автоматизации балансировочных операций. 1 з.п. ф-лы.
1. Способ определения дисбаланса рам гиростабилизатора, заключающийся в измерении момента от дисбаланса при помощи моментомера при горизонтальном положении оси балансируемой рамы, отличающийся тем, что корпус гиростабилизатора устанавливается на неподвижное основание, рама гиростабилизатора приводится во вращение с постоянной угловой скоростью приводом, входящим в состав гиростабилизатора и включающим в себя датчик положения балансируемой рамы и моментный двигатель, измеряется ток в цепи питания двигателя как функция угла поворота рамы при прохождении рамой полного оборота, полученный массив преобразуется в два массива: первый путем умножения полученного массива на синус соответствующего угла поворота рамы, второй путем умножения полученного массива на косинус соответствующего угла поворота рамы, находятся средние значения полученных массивов, абсолютное значение дисбаланса определяется как корень квадратный из суммы квадратов полученных средних значений, угол положения несбалансированной массы определяется как арктангенс отношения средних значений массивов.
2. Способ определения дисбаланса рам гиростабилизатора по п. 1, отличающийся тем, что в исходном положении корпуса гиростабилизатора измерение тока в цепи питания моментного двигателя производится на ограниченном угле поворота рамы ±ϕи, после чего корпус гиростабилизатора поворачивается на угол 2ϕи и производится измерение тока в цепи питания двигателя в этом положении, повороты гиростабилизатора и измерения тока повторяют столько раз, сколько необходимо для формирования массива данных за полный оборот рамы относительно вектора силы тяжести Земли, исходный массив функции тока в цепи двигателя от угла поворота за полный период получают объединением массивов, полученных при измерении тока в каждом положении корпуса гиростабилизатора.
| Лавров С.А | |||
| О статической балансировке специальных приборов | |||
| Авиационная промышленность: научн.-произв | |||
| журн | |||
| М., Авиапром | |||
| СССР, 1973, N1, с.25-27 | |||
| US 3064469 A, 20.11.1962 | |||
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ВАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2017156C1 |

