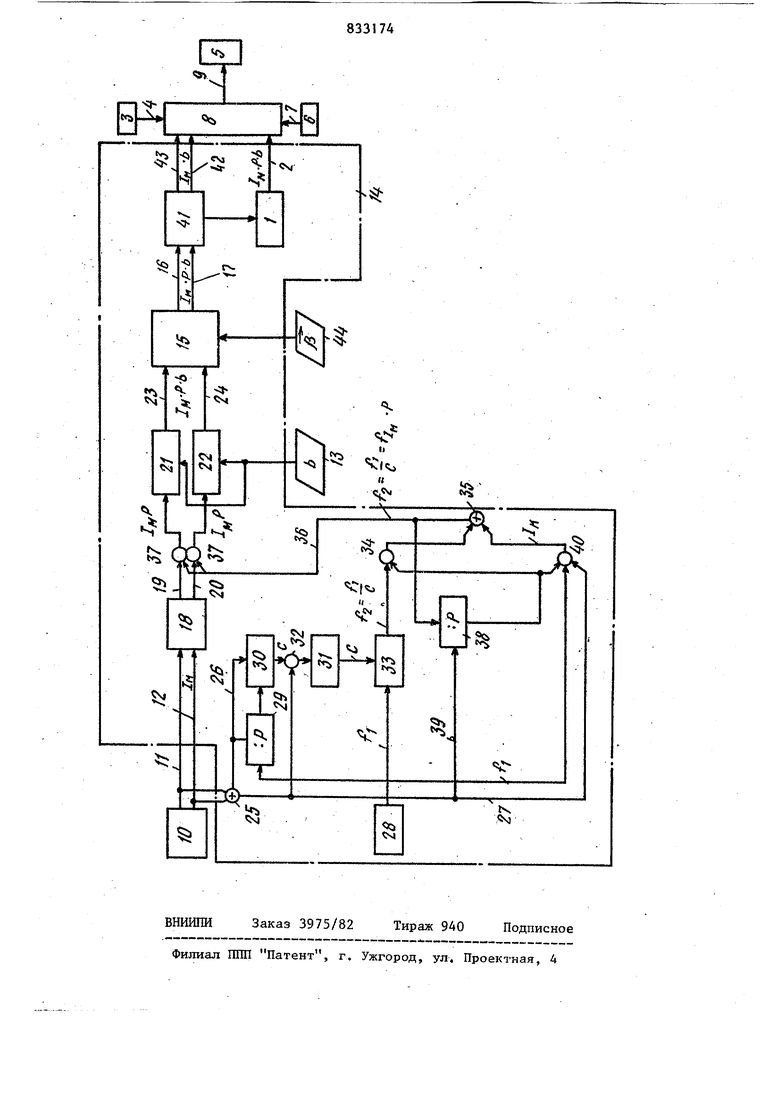
винт соединен с импульсным преобразователем числе оборотов. Созданные импульсы подаются через схему делителя частоты к схеме координации, содержащей цифроаналоговый преобразователь, к которой подаются и созданные в зависимости от числа оборотов импульсы инструмента, т.е. шлифовального круга и изделия 2 J. Недостаток известного устройства заключается в том, .что при использовании уапв шарикового ходового винта для измерения пути следует считаться в лучшем случае с ошибкой при передаче от 0,ОО2 до 0,003 мм, которая является слишком большой для шлифования боковых сторон зубьев особо точных зубчатых колес. Дру гие неточности возникают от того, что в схеме координации сравниваются прямо деленная по частоте последовательность импульсов каретки изделия, умноженная и деленная последовательность импульсов каретки изделия и умноженная и деленная последовательность импульсов инструмента с последовательностью импульсов изделия. Цель изобретения - повышение точности рабочей скорости устройства. Поставленная цель достигается тем, чт в устройство для управления станком для обработки косозубых изделий, содержащее первый импульсный датчик, второй импупь сньй датчик, выходы которых подключены к регулятору, третий импульсный датчик, выход котфого связан с регулятором, вве дены импульсный генератф постоянной ча стоты, js выходу которого подключен делитель, счетчик, подключенный к делителю и к третьему импульсному датчику, второ делитель, который с одной стороны подклю чен к счетчику через первый элемент И . управляемый третьим импульсным датчиком, и который с другой стфоны подключен к импульсному генератору, третий де литель подключенныйк третьему импульсному датчику, причем выходьг второго и третьего делителя подключены к второму элементу И, а выходы третьего импульсного датчика, импульсного генератора третьего делителя подключены к третьему элементу И, при этом второй и третий элементы И подключены к элементу ИЛИ, элемент ИЛИ подключен к четвертому элементу И, угфавляемому третьим импульсным датчиком, причем управл5пощий вход третьего делителя пошслючен к выходу элемента ИЛИ. На чертеже приведена функциональная схема устройства. Устройство содержит цифроаналоговый преобразователь 1 с выходом 2, первый импульсный датчик 3 (гла поворота инструмента) с выходом 4, двигатель 5, второй импульсный датчик 6 с выходом 7, регулятор 8 с выходом 9, третий импульсный датчик 10 с выходами 11 и 12, установочньр срГан 13, дифференциал 14, еверсивный переключатель 15 с выходами 16 и 17, блок 18 памяти с выходами 19 и 20, умножители 21 к 22 с выходамисоответственно 23 и 24, элемент 25 ИЛИ с выходами 26 и 27, импульсный генератор 28 постоянной частоты, делитель 29, счетчик 30, блок 31 памяти, первый элемент 32 И, второй делитель 33, второй элемент 34 И, элемент 35 ИЛИ с выходом 36, четвертые элементы 37 И, третий делитель 38 с входом 39, третий элемент 40 И, счетчик 41 с выходами 42 я 43 я установочный орган 44. Для шлифования косозубых цилиндрических колёс необходимо создать для него дополнительное вращательное движение, что можно осуществлять общеизвестным образом посредство{;/1 механической дифуференциальной передачи снабженной сменными шестернями, или преимущественно . путем создания дополнительных импульсов, поступающих к регулятору 8. Устройство для указанного создания и подачи импульсов, вызывающих дополнительное вращательное движение, называют электронным дифференциалом. Для создания необходимой путевой информации о движении каретки предусмотрена общеизвестная цифровая система. измерения пути, состоящая из оптического масштаба и прин дяежащей к нему считьшающей головки, причем оптический масштаб закреплен на каретке, а считьтающая головка закреплена на корпусе суппорта. Считывающая головка создает в зависимости от пути импульсь Л i Таким образом, измерение перемещения каретки и этим зубчатого осуществляется непосредственно на каретке, т.е. без поМощи механических передаточных элементов, например зубчатой рейки и ше-: стерни, шарикового ходового винта и шариковой гайки зубчатой передачи и т.п. По этой причине нет практически никаких механических источников ошибок. Путевые информации поступают от датчика 10 в виде импульсов Т к электронному дифференциалу 14. В последний вводятся данные, необходимые для отношения движения каретки к дополнительному вращательному движению, а именно 58 модуль tn , число зубьев 2 и угол каклона зубьев (Ь подвергаемого шлифоваию косозубого Цй линдрического колеса, двоиной радиус делительной окружности ко торого составляет, как известно, щ-г /cos Упом-мутые данные назьшают фактором tj При этом для создания дополнительног вращательного движения должно иметься бпределенное отношение числа имоульсов действительного значения 1 изделия к числу созданных в зависимости от пути масштабных импульсов 1 , каждый раз за единицу времени. Это представленное фактором Ь отношение рассчитывается следующим образом .. It-m-x-o, ЛЛ где 1 - число импульсов изделия за единицу времени; INV - число масштабных импульсоя за единицу времени; число импульсов изделия за оборот;О - постоянная масштаба (число импульсов на метр). Таким образом, правильное отношение получается рассчетом и установкой фактора Ъ . Для ввода фактора Ъ в электронный дифференциал 14 предусмотрен установочный орган 13, В учетом фактфа Ь .включая направление винтовой линии зу бьев и направлённе.подачи каретки, импульсы 1(уц обрабатьюаются в электронном дифференциале 14, причем, как указано ниже, осуществляется и предварительно выбираемое умножение путевых импульсов 1|«А в цел$1х повышения разрешающей спо собности измерения пути. Полученный обработкой в электронном дифференциале 14 сигнал поступает в виде последовательности импульсов к регулятору 8, в котором последовательность импульсов Tjvv накладывается на последовательность импульсов Ig установленного на инструментальном шпинделе Датчика 3 в цепях, создания сравнением с последовательностью импульсов I привода изделия сигнал, оказывающий влияние на двигатель 5 изделия и создающий очень точным образом необходимое дополнительное врашательное движение . Согласно использованному в устройстве способу создается с началом каждого интервала, ограниченного двумя следующими друг за другом масштабными импульсами 46 l во временно, «о меньшей мере прнблизигельно, равномерной аоследовагельиосги определенное постоянное число промежуточных импульсов-Лругими словами, осуществляется предварительно выбираемое умножение маштабных импульсов Гдд датчика Ю на определенный фактор р таклм образом, что ввод соответствующего числа р -1 промежуточных импульсов в течение изменяющихся периодов частоты повторения импульсов 1, оптического масштаба осуществляется с возможно равномерным распредепенвеМ. , Так как скорость движения подачи каретки изменяется по отношению к расстояниям между штрихами масштаба системы измерения пути не скачками, а постепенно, соответствующие расстояния р-1 промежуточных импульсов в течение определенного периода 1,, (.и) последовательноffсти масштабных импульсов 1д .определяются согласно изобретению на основании предыдущего периода.. (и-1). Датчик Ю каретки, осуществляющей перемещения в обоих направлениях оси зубчатого колеса, передает путевую информацию в виде импульсов 1дд , поступающих в блок 18 памяти. Эти импульсы 1ц поступают, кроме того, на элемент 25 ИЛИ, Импульсный генератор 28 генерирует импульсьг постоянной частоты, составляющей, например, 1 МПх, Импульсы частоты . -поступают на вход делителя 29, котфый считывает приходящие импульсы и после достижения определенного числа импульсов выдает один импульс к дополнительно вколоченному счетчику ЗО, При этом частичный фактор делителя равен упомянутому фактору Р умножения масштабных импульсов 1.Д , Он может колебаться приблизительно в пределах 4-64, причем для факт(фов ниже 4 ,. полученное повышение разрешающей способности масштабных импульсов не играет почти никакой роли, а для факторов выше 64 требуется сложное электронное обсрудова-.ние и (швбки импульсного масштаба не позволяют высокс расширяющей способности, В счетчике 30, служащем для измере-. ния периодов, выходные импульсы делителя. 29, т,е. импульсы частоты f / р считьшаются непрерывно до тех пор, пока не появляется следующий масштабный импульс 1 .В этот момент содержание с счетчика перезаписывается в блоке 31, Для этого выход счетчика ЗО подключен 7S3 к первому входу элемента 32 И, а второй вход элемента 32 И соединен с выходом элемента 25 ИЛИ, Подачей масштабных импупьсов 1 осуществляется сброс показаниЙ делителя 29 н одновременна) счетчвка 30. Таким образом, в каждом периоде -(jw d) масштабный импульс и, деленное фактором р , число импульсов частоты считываются и запоминаются в блоке 31, где они сохраняются до еледующего периода (И+1) и только масштабный импульс 1 (), следующий за вызывающим счет масштабным импульсом 1д(И), вызьшает передачу содержания из счетчика 30 в блок 31 и одновременно возвращает счетчик 30 .в исходное положение в целях начала нового счетного цикла. Из блока 31 содержание с счетчика ЗО поступает в другой делитель 33, считьюаюший приходящие импульсы постоянной частоты j и после достижения числа с поступающих от импульсного генератора 28 импульсов выдающий выходной импульс, после чего он возвращается в исходное положение, начинает опять считьтать до достижения числа t , отдает опять выходной импульс и т.д., Таким образом, частота выходных импульсов делителя 33 составляет {а - , С и может изменяться в соответствии с имеющимся в данный момент содержанием с счетчика 30 помере предьшущего периода масштаб ных импульсов. С другой стороны, содержание с делителя 33 состоит из считанны в течение периода I и деленных на по стоянное число р импульсов импульсного генератс а 28 частоты f , т.е. оно со ставляет С- Т.. гIw4 Следовательно, выходные импульсы делителя 33 имеют следующую частоту Р -1-1 4 . .-р р а с S хд, 4 где - частота масштабных импуль сов. Таким образом, выходные импульсы делителя 33 образуют последовательность импульсов, частота которой равна умножейной на постоянный фактор р частоте масштабных импульсов. Другими словами, последовательность масштабных импульсов с р-1 промежуточными импульсами меж 4 , у двумя следующими друг за другом мастабными импульсами, причем расстояния промежуточных импульсов являются в каждом периоде масштабных импульсов равно мерными н на основании предыдущего периода определенными. Выходные импульсы делителя 33 поступают через элемент 34 И, элемент 35 ИЛИ и к двум элементам 37 И, ив зависимости от кoм /fyтaциoннoгo положения блока 18, к одному из выходов 19 и 20. В целях достижения точно р-1 проме жуточных импульсов вначале каждого периода масштабных импульсов таким образом, что для каждого более длинного периода Предусматривается перерыв в генерированин импульсов, для каждого более коротксяго периода вводятся лишние промежуточные импульсы повьшгенной часто- ты непосредственно после начала следующего периода предусмотрены наряду с элементом 34 И и элементом 35 ИЛИ делитель 38 и элемент 4О И с тремя входами. Счетный вход делителя 38 подключен к выходу элемента 35 ИЛИ. Управляющий вход делителя 38 для его возвращения в нулевое положение .подключен к выходу элемента 25 ИЛИ. Выход делителя 39 подгслючен к входу элемента 34 И к входу элемента 4О И. Выходные импульсы делителя 33 пос-|; тупают обычно через элемент 34 И и элемент 35 ИЛИ к входу делителя 38. Как только делитель 38 Достиг емкости р , он блокирует элемент 34 И. Только при следующем масштабном импульсе 1уу делитель 38 освобождает элемент 34 И таким образом, что он возвращается под влиянием .масштабногоийпульса в нулевое положение. Однако, если делитель 38 при прибытии следующего масштабного импульса I / еще не емкости р , то при- прибытии этого следуюшего масштаб1Йэго импу-. льса импульсы импульсного генератсра 28 частоты поступают в виде корректирующих импульсов 1. к элементу 35 ИЛИ. Таким образом, делитель 38 продолжает считывать до сих пор, пока он не достигнет емкости р , после чего он блокирует элемент 4О И и возвращается в нулевое .положение. Так как частота импульсов импульсного генератора 28 на много выше, чем частота j /с .. выходных импульсов делителя 33, осуществляется передача импульсов импульсного генератора 28 задолго до появления выходного .96 импульса счегчика 33 после масшгабного импульса. Для установки величины допопнительного вращательного движения изделия-зубчатого колеса- следует учесть его данные модуль Ун , число зубьев z и угол наклона зубьев р , и умножить поступающую последовательность импульсов делителя 33 на соответствующий фактор Ь1 который меньще 1. Для этого вклю чают регулируемые умножители 21 и 22, которые снабжены установочным органом 44. Число разрядов умножителей 21 и 22 определяет точность устройства. В данном случае целесообразно предусмотреть 18 двоичных разрядов. Реверсивный переключатель 15 можно переключать посредством установочного органа 44 в целях учета направления винтовой линии изделия - зубчатого колеса, т.е. направления угла наклона зубьев р . Реверсивный переключатель 15 имеет два выхода 42 и 43, относящиеся к направлению дополниJ тельного вращательного двихсения изделиязубчатого колеса, причем один выход 43 представляет собой канал для прямого вращения, а -другой выход 42 - канал для обратного вращения изделия-зубчатого колеса. Если, .например, установочНБЙ орган 44 имеет выходной сигнал с одним бинарным уровнем, то выход 23 соединен через реверсивный переключатель 15 с выходом 43, а выход 24 - с вйосодом 47. В случае выходного сигнала установочного органа 44 с другим бинар-35 ным уровнем выход 23 соединен с выходом 42, а выход 24 - с выходом 43. Находящаяся на одном из выходов 43 и 42 в виде последовательностей импульсов цифроинкрементная информация IО о положении каретки изделия подразделяется затем в целях ц одготовки сигнала для регулятора 8 системы управления принудительным движением таким образом, что к регулятору 8 подается грубое извещение45 положения в цифро-инкрементной форме, а точнее извещение положения в аналрговой форме. Это подразделение осуш.ествляется .при помощи счетчика 41, считьшающего в данном примере выполнение от нуля до. определенного постоянного числа р-1 и формирующего затем вьрсодной импульс к одному КЗ соединенньЕх с регулятором 8 выV4Оходом 42 и 43. Однако, подразделение может осущесгвяягься н при помощи любс«го другого фактора. Содержание счетчика 41 подается к цифроаналоговому преобразователю 1, подключенному к нему и выдающему соответствующий аналоговый сигнал на регулятор 8. Предлагаемое устройство позволяет повысить скорость резанйя и точность обработки боковых сторон зубьев по способу винтового обката, , Формула изобретения 1. Устройство для управления станком для обработки косозубых изделий, содержащее первый импульсный датчик, второй импульсный датчик, выходы которых подключены к регулятору, третий импульсный датчик, вых.од связан с регулятором, отличающееся тем, что, с целью повыщения рабочей скороста и точности, в него введены импульсный генератор постоянной частоты, к выходу которого подключен делитель, счетчик, подключенный к делителю и к третьему импупьсному датчику, второй делитель, который с одной подключен к счетчику через первый элемент И, управляемый третьим импульсным датчиком, и который с другой стороны подключен к импульсному генератору, третий делитель, пошслючен ный к третьему импульсному датчику. причем выходы второго и третьего делителя подключены к втсрому элементу И, а выходы третьего импульсного датчика, импульсного генератора и третьего делителя подключены к третьему элементу И, при этом второй и третий элементы И подключены к элементу ИЛИ, элемент ИЛИ подключен к четвертому элементу И, управляемому импульсным Датчиком, причем управляющий вход третьего делителя подключен . к выходу элемента ИЛИ. Источники информации, принятые во внимание при экспертизе 1. Штенг ФРГ № 1248964, кл. В 23 F 5/ОО, оПублик. 197О. 2. Патент ФРГ № 2255514, кл. В 23 F 5/ОО, опублик. 1977 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения прерывной кинематической погрешности зубчатых колес | 1980 |
|
SU926526A1 |
| Устройство синхронной связи к зубообрабатывающему станку, работающему по методу обката | 1986 |
|
SU1392545A1 |
| Цифроаналоговая следящая система | 1986 |
|
SU1405025A1 |
| Устройство для измерения и коррекции перекоса камеры судоподъемника | 1989 |
|
SU1735804A1 |
| Акустический профилемер подземных полостей, заполненных жидкостью | 1989 |
|
SU1786458A1 |
| Устройство для регулирования синхронногоХОдА зубООбРАбАТыВАющЕгО CTAHKA | 1978 |
|
SU822772A3 |
| Калибратор периодических сигналов инфразвуковых частот | 1987 |
|
SU1449926A1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗАГРУЗКИ ДВИГАТЕЛЯ | 1999 |
|
RU2159417C1 |
| Электропривод | 1987 |
|
SU1476584A1 |
| Устройство для программной закалки длинномерных изделий | 1982 |
|
SU1059012A1 |