со
со
01
4
сл
Изобретение относится к станкостроению, а в частности к управлению зубообра- батываюидими станками, работаюпшми по методу обката.
Цель изобретения - повышение точности устройства.
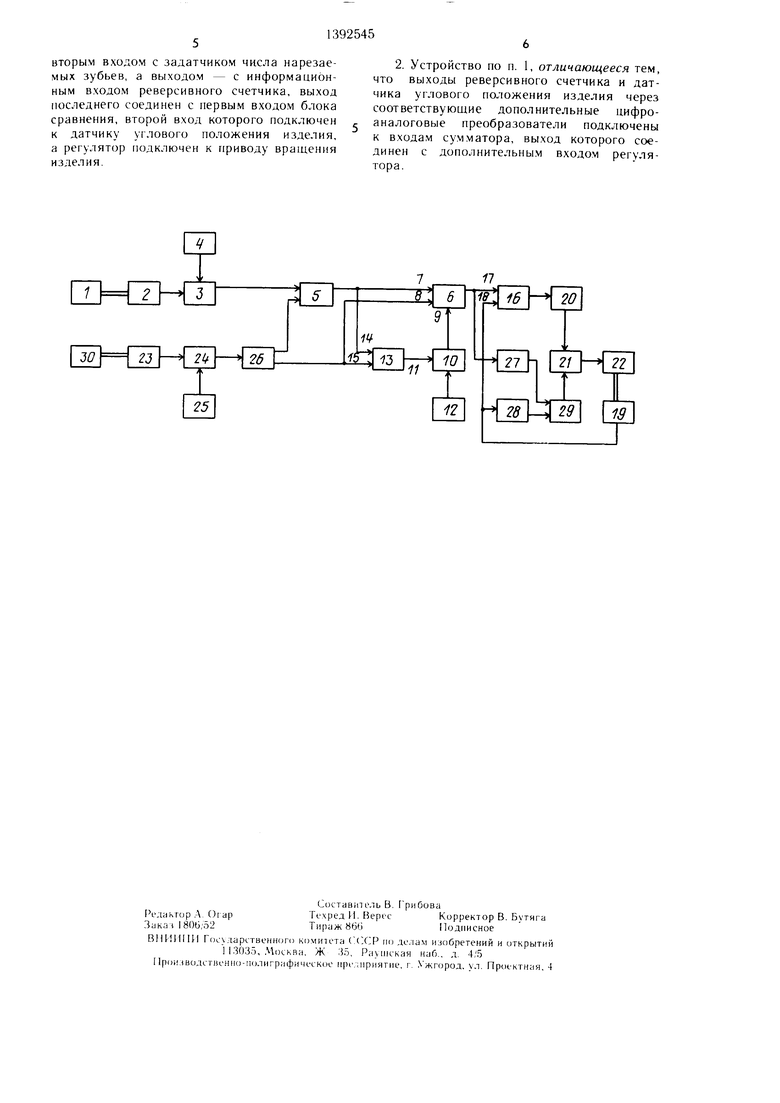
На черте/ко nDHBr.j Vja блок-схема устройства.
Устройство содержит привод 1 вращения инструмента с импульсным датчиком 2 углового по.чожения, умножитель 3 числа импульсов с задатчиком 4 числа заходов инструмента, элемент ИЛИ 5, реверсивный двоичный счетчик 6 с входо.м 7 обратного счета, входом 8 прямого C4eia и информационным входом 9, переключатель 10 прямого кода в обратный с управляюгцим входом 11, задатчик 12 числа нарезаемых зубьев, б. юк 13 сравпепия частот импульсов с входами 14 и In, б. кж 16 сравнения чисе:1 импульсов с в.хода.ми 17 и 18, импу.льсный датчик 19 у| лово Ч) положения изделия, цифроаналоговый преобразователь 20 , регулятор 21 привода враа1ения изделия, импульсный датчик 23 перемещения суппорта, делите.ль 24 с пе)емсппы коэффициентом деления с задатчиком 25 угла наклона зуба, коммутатор 26, преобразователи 27 и 28 частота напряжение, сумматор 29 и привод 30 перемеп1епия суппорта.
Устройство работает следующим образом.
При pafxHt привода 1 вращения инструмента жгсгкп сиязап} Ь Й с ним датчик 2 г с- нерирует последов а те;1ьность имг|ульсов, число которь 11)опорционально углу поворота инструмента. Эти импульсы известным способом умножак гся в соответствии с числом ааходов и пструмеп га и через элемент ИЛИ 5 1исгупак)т с ре1улируемый делитель 4nc;ia им.чу,, состоящий из )е- версивпого двоичного счетчика 6, переклк - чателя 10 прямою кода в обратный, задат- чика 12 и блока 13 сравш-ния частот имиу. п, сов.
Реверсивньи двоичный счетчик 6 работает в режиме делителя числа имиульсов с предварительной установкой кода. Принцип работы такого делителя заключается в том, что счет начинается каждый раз не с нуля. а с некоторого числа N, код которого (двоичный) записывается в е четчик 6 через ип- формапионный вход 9. Этот код устанавливается задатчиком 12. При поступлении счетиых импу;1ьсов на вход 7 обратного счета состояние счетчика уменьщается на единицу с каждым входным импульсом и когда очередной импульс переводит счетчпк в нулевое состояние, в него снова записывается двоичный код числа N, а на выходе появляется один импульс. При этом коэффициент деления в режиме обратного счета равен чис. 1у N. При поступлении счетных
5
0
5
импульсов на вход 8 прямого счета состояние счетчика увеличивается на единицу с каждым импульсом и когда счетчик очередным импульсом переводится из состояния максимальной емкости М в нулевое, в него снова записывается код числа N, а на выходе появляется один импульс. В этом случае коэффициент деления равен М-N. Для того, чтобы коэффициент деления при
O обратном и прямом счете был одинаковым и равным числу N, необходимо при прямом счете в счетчик записывать обратный код числа N. Если поочередно на входы прямого и обратного счета поступают пачки импульсов, то число импульсов на выходе определяется разностью чисел импульсов на входах, деленной на коэффициент делении. При этом для сохранения коэффициента деления равным установленному задатчиком 12 необходимо контролировать частоту импульсов на обоих входах и, если oFia выше на входе обратного счета, то на информационный вход 9 должен передаваться код за датчика 12 в прямом виде, и если на входе прямого счета, то в обратном. Для этого в схему введен переключатель К) кода с управляющим входом 11. В зависимости от уровня сигнала (высокого или низкого) на этом входе код задатчика 12 передается па информационный вход, 9 счетчика 6 прямо или инвертируется. Управляет
Q переключателем 10 кода блок 13 сравнения часто импульсов, на выходе которого по- ;15,1яется сигнал высоког О или низкого уровня в зависимости- от частоты импульсов, посту 1аюпи1х на его входы 14 и 15, соединенные с входами 7 и 8 реверсивного двоич5 1И.ПО счетчика 6.
При нарезании пря.мозубых колес импульсы с элемента ИЛИ 5 подаются на плод 7 обратного счета счетчика 6 и на и.чол 14 блока сравнения частот импульсов. При JTOM им11ульс 1ый датчик 23 переме- ценпя суппорта отключен, на вход 15 бло- t.a 13 импу;1ьсы н«; послупают и на его выходе усганавливаегся сигнал, соответствую- записи в счетчик 6 прямого кода числи, установлеппого задатчиком 12. Импуль5 сы, поступивплие па вход 7 счетчика 6, де- ЛЯ1СЯ па установленное число и подаются на вход 17 блока 16 сравнения чисел импульсов, на второй вход 18 которого подаются импульсы с углового импульсного датчика 19 углового положения изделия. Блок 16 сравнения чисел импульсов подключен к цифроаналоговому преобразователю 20, на выходе которого формируется аналоговый сигнал, пропорциональный разности чисел импульсов, приходящих на входы 17
5 и 1Н блока 16 сравнения. Этот сигнал через регулятор 21 управляет частотой вращения нринода 22 изде. шя. При этом регулятор стремится поддержать такую частоту вра0
цения, фи которой в каждый момент времени на оба входа блока 16 проходит одинаковое число импульсов. В этом случае рассогласование приводов инструмента и изделия близко к нулю. Число импульсов датчика 2 углового положения инструмента, приходяпаихся на один оборот инструмента, равно числу импульсов датчика 19, приходящихся на один оборот изделия, поэтому для получения необходимого соотношения частот вращения изделия и инструмента
Пцзд к
. .ii-,
nuwCTfZ
где К-число заходов инструмента;
Z -число зубьев изделия, импульсы датчика 2 должны быть умножены в умножителе 3 в К, раз и разделены в регулируемом делителе на число Z. Коэффициенты умножения и деления устанавливаются задатчиками 4 и 12. При обработке косозубых колес с импульсного датчика 13 перемещения суппорта через делител) 24 с переменным коэффициентом де.чения и коммутатор 2Н в счетчик 6 поступают :ю- полнительные импульсы. В зависимости от направления наклоны зуба и направления пере.меп1ения суппорта эти импульсы коммутатором 26 напранляктгся через элемент ИЛИ 5 на вход реверсивного счетчика tx Еели импульсы приходят па вход 8. то они су.ммируклч я с и.и1УЛ1)Сами датчика 2 инструмента, при этом изделие по.чучает дополнительный донпрот. дополнительные нмпу.аьсы loCTvnaiO i на вход 8, то в счетчике происходит выч.чтапие их из числа импульсов датчика 2 и изделие замедляется. Для заданного yr, ia наклона :u 6a 1ич бходн- мое cooTHOLiienne частот и.мпч льса датчика 13 перемещения (jpTa и датчика 19 NT.IO- вого положения изде,1ия определяется как
ь
. IUJA rm g
fxчзд
JL(
sчастота имчульсов датчика суппорта;
частота импульсов датчика углового положе)1ия и; делия; число имнульсов на 1 оборот из- дел и я;
число импу/ibcoB на I .мм перемещения суппорта; /1 -yrOvi наклона зубьев; ти-модуль обрабатываемого изделия. В этой формуле в знаменателе отсутствует число Z - число зубьев обрабатываемого изделия, так как дополнительные и.мпульсы нрохо,аят через регулируемый де.читель, настроешн.ш на коэффициент Деления, раьньм 1 /. Эт является сущест- вепны.м п|)еимун1естном изобретения, за- ключаюн1имся в том, что каждый дополни
0
5
0
5
0
5
0
5
тельный импульс па входе реверсивно о счетчика вызывает сдвиг фа;и:,1 выходных импульеов на величину, равную 1 7. HejiHo- да их следования, в то время как в известном устройстве каждый донсхтните.мьный импульс вызывает поворот изделия па целую дискрету. Кроме того, частога следования допо.чнительных .1ьсов, приходя щих на входы реверсивного счетчика, не зависит от числа Z и нрн .чюбом числе обрабатываемых зубьев остается достаточно высокой, что способствует более равномерному вращению изделия, в то время как в известном ycTpoiicTBe частота уменьшается пропорционально числу Z. 11редла1 ае.мое устройство характеризуется также тем, после деления в счетчике 6 дополните,)- 1)е им 1ульсы, в слччае )- рас ределе 1ные во времен, усредняются, что также Овь Ц1ает точность ycTpoii- ства. Для пов) точности ycTpoiicTBa в устройство введена обрат 1ая связь о скорости врап1епия издел я, ,1ненная а реобразователях 27 и 28 частота - иа- ряжение, которые через сумматор 29 сое- дине1 1,1 с ре улятором 21. Это )собству- ет улучп ен 1К) качества устойч вост1 системы.
Формула изобретения
1. Устройство (ОЙ СВЯЗ К зубооГ)рабат ваюн1ему , раб() по методу обката. содержап1ее приводы вра- |1К 1И я нст) и изделия с датчиками уг,()го 11(). 1оже 1 1Я, привод cyiii 0)Ta с датчиком ) по,1ожен Я, лируемь Й де., числа мнульсон, элемент ИЛИ, отличающееся тем. что, с ie, U)K) 1ов1 П11еп я TO4 iocTii об)аб)ТК, в него вве- задатчик чнс.1а заходов 1 етруме та, , ia } арезаем х , уг,та 1ак.она зу- бьен, у., 1ь, коммутатор, де, итель с пере.менным коэффиц 1ентом, 1оследова- те, И)НО блок , 1и|ф- р(,1оговый г реобразователь и ре Л лятор, а регулируемый делитель вынол ен а ре- счетчике, блоке сравне я частот, ,:1ючателе, риче.м вход) ум(),я
ПОДК.) к датчику () ПО.:(
струмента и к задатч 1ку чис. 1а заходов инструмента, а выход через э, 1еме т И.ЧИ к обратному входу реверс 1В 101 о счетчика датчика ереме це Я )та через делитель с неременным коэффн и1е том, подключенный вторым входом к задатч ку угла наклона зубьев, ) с входо коммутатора, один В)ход кого)ог() fei с входом элемента И, 111. а ()й с рям,1м входом В НО Ч) счетчика и с )1м входо.м б,ока сравпе Н1я частот, второй нход которого нодк,1К)чен к в,Х(ыу элеме та IL Iit. а в)ГХод к вому входу пе нм лючате.1я. соедп neiiHoix)
вторым входом с задатчиком числа нарезаемых зубьев, а выходом - с информационным входом реверсивного счетчика, выход последнего соединен с первым входом блока сравнения, второй вход которого подключен к датчику углового положения изделия, а регулятор подключен к приводу вращения изделия.
2. Устройство по п. 1, отличающееся тем, что выходы реверсивного счетчика и датчика углового положения изделия через соответствующие дополнительные цифро- аналоговые преобразователи подключены к входам сумматора, выход которого соединен с дополнительным входом регулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Аналого-цифровое устройство для управления токарным станком | 1980 |
|
SU947830A1 |
| Устройство для управления станком | 1981 |
|
SU970322A1 |
| Устройство для управления правкой абразивного червяка | 1986 |
|
SU1357203A1 |
| Устройство для дробления стружки на станках с программным управлением | 1982 |
|
SU1072001A1 |
| АВТОМАТИЗИРОВАННЫЙ РЕЗЬБОНАРЕЗНОЙ ШПИНДЕЛЬ | 1993 |
|
RU2069608C1 |
| Устройство для измерения вертикальных перемещений бурильной колонны | 1988 |
|
SU1557315A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДАМИ СТАНКА-АВТОМАТА ДЛЯ ШЛИФОВАНИЯ ВИНТОВЫХ КАНАВОК РЕЖУЩЕГО ИНСТРУМЕНТА | 1990 |
|
RU2031771C1 |
| Автомат для шлифования винтовых канавок | 1985 |
|
SU1713778A1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Устройство для регулирования температуры | 1981 |
|
SU980076A1 |
Изобретение относится к области станкостроения, в частности к управлению зубообрабатываюшими станками. и,ель шение точности обработки. Устройство С(. держит приводы вращении инструмента, перемещения суппорта и вран1ения изде. 1и.ч, снабженные датчика.ми, задатчики чис, 1а заходов инструмента, yr.ia наклона зубьев и числа нарезаемы.х зубьев и регулируемый делитель числа импульсов. Устройство позволяет для заданного угла наклона зубьев получить необ.ходимое соотношение частот импульсов перемещения суппорта (каретки) к и вращения изделия fb lx/fi,3 sin y/j -ni-g, где у - число импульсов на один оборот изделия; g - число импульсов на 1 мм перемещения супнорта; f - - угол наклона зубьев; m - модуль обрабатываемого изделия. Устройство позволяет повысить разрешающую способность, что повьипает точность обработки. 1 з.п. ф-лы, 1 ил. (Л
| Устройство для управления станком для обработки косозубых изделий | 1978 |
|
SU833174A3 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
