t
Изобретение относится к куэнечнопрессовому оборудованию и может быть использовано для привода исполнительных механизмов колодновысадочного автомата.
Известен гидравлический импульсный привод к холодновысещочному автомату, содержащий управляющий и следящий краны-золотники, гидроцилиндры, связанные штоками с исполнительными механизмами, устройство сравнения их положений и.фазочувствительный усилитель с двумя входами l .
данный привод не обеспечивает достаточного быстродействия по обработке рассогласования положения исполнительных механизмов, так как скорость изменения выходного параметра |азочувствительного усилителя не зависит от величины рассогласования и, кроме того, по мере нарастания скорости изменения величины рассогласования привод производит отработку рассогласования с неизменной скоростью.
Цаль изобретения - уменьшение времени отработки рассогласования положения гидроцилиндров исполнительных механизмов и увеличение точности синхронизации.
Поставленная цель достигается тем,, что привод снабжен цепью коррекции, состоящей из установленных на пути перемещения штоков гидроцилиндров датчиков скорости исполнительных механизмов , соединенных с датчиками блоков масштабных коэффициентов, связанного с блоками устройства сравнения скоростей, своим выходом соеди0ненного через регулятор частоты и генератор импульсов со вторьм входом фазочувствительного усилителя, и устройства задержки, связывающего выход устройства сравнения положений со
5 вторым входом регулятора частоты.
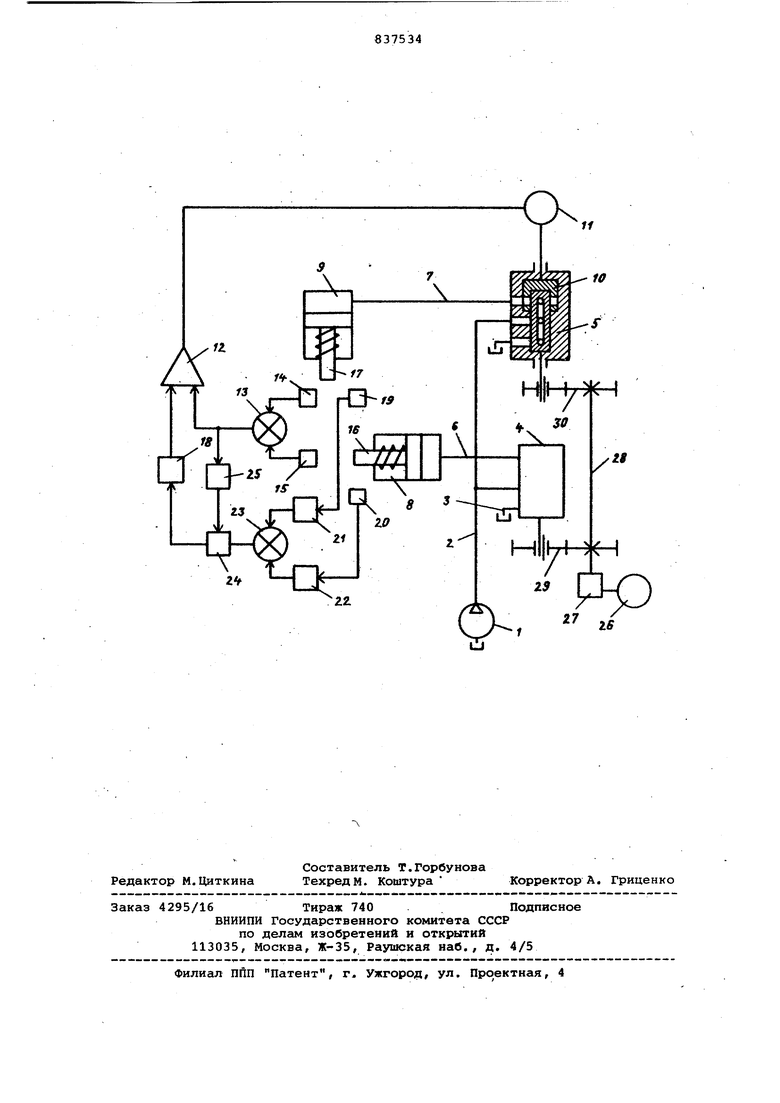
На чертеже представлена блок-схема гидравлического импульсного привода к холодновысадочному автомату.
Гидравлический импульсный привод
0 к холодновыссщочному автомату содержит источник 1 постоянного гидравлического давления, напорную 2 и слив ную 3 гидролинии, управляющий 4 и следящий 5 краны-золотники, соединенные
5 гидролйниями 6 и 7 соответственно с управляющим 8 и следящим 9 гидроцилйндрами исполнительных механизмов (на чертеже не показаны). Отслеживающая втулка 10 крана-золотника 5
0 кинематически связана с электродвигателем 11, вход которого соединен с фазочувствительным усилителем 12. Пер вый вход фазочувствительного усилителя 12 через устройство 13 сравнения подключен к датчикам 14 и 15 положения, установленных на путях перемещений штоков 16 и 17 гидроцилиндров 8 и 9 исполнительных механизмов. Второй вход фазочувствительного усилите ля 12 подключен к выходу генератора 18 импульсов. Датчики 19 и 20 скорости, установленные на путях переме щений штоков 16 и 17 гидроцилиндров 8 и 9 исполнительных механизмов, блоками 21 и 22 масштабных коэффициентов через устройство 23 сравнени и регулятор 24 частоты соединены с входом генератора 18 импульсов. Второй вход регулятора 24 частоты устройства 25 задержки соединен с устройством 13 сравнения датчиков 15 и 14 положения. Золотники кранов 4 и 5 соединены с электродвигателем 26 через редуктор 27, приводной вал 28 и зубчатые передачи 29 и 30. Устройство работает следующим образом. Давление жидкости источника 1 при вращении золотников кранов 4 и 5,при водимых электродвигателем 26, передается в виде гидравлических импульсов по гидролиниям 6 и 7 в полос ти гидрО15илиндров 8 и 9. Датчики 14 и 15 положений, стоящие на путях перемещения гидроцилиндров 8 и 9 испол нительных механизмов, через устройст вр 13 сравнения подают сигнал рассогласования на вход фазочувствитель ного усилителя 12, который устанавливает направления включения электро двигателя 11. Датчики 19 и 20 скорости через блоки 21 и 22 масштабных коэффициентов и устройство 23 сравнения датчиков скорости регулятором 24 частоты устанавливают частоту генератора 18 импульсов. Разрешающий сигнал на коррекцию частотного режима работы привода на следующий цикл -работы устройства фор мируется задним фронтом сигнала рассогласования положений исполнительны механизмов в предшествующем цикле работы и через устройство 13 сравнения и устройство 25 задержки подается на второй вход регулятора 24 частоты. Генератор 18 импульсов через фазочувствительный усилитель устанавливает скорость работы электродвигателя 11 по частоте, зависимой от величины рассогласования скорости штоков гидроцилиндров 8 и 9 исполнительных механизмов. Электродвигатель 11 поворачивает отслеживающую втулку 10 крана золотника 5, который формирует в гидроцилиндр 9 по гидролинии 7 гидравлические импульсы, направленные на уменьшение рассогласования сигналов датчиков положения и датчиков скорости исполнительных механизмов гидроцилиндров 8 и 9. Формула изобретения Гидравлический импульсный привод к холодновысадочному автомату, содержащий управляющий и следящий кранызолотники, гидроцилиндры, связанные штоками с исполнительными механизмами , устройство сравнения их положений и фазочувствительный усилитель с двумя входами, отличаюадийс я тем, что, с целью уменьшения времени на отработку рассогласования положений гидроцилиндров исполнительных механизмов, привод снабжен цепью коррекции, состоящей из установленных на пути перемещения штоков гидроцилиндров датчиков скорости исполнительных механизмов, соединенных с датчиками блоков масштабных коэффициентов, связанного с блоками устройства сравнения скоростей, своим выходом соединенного через регулятор частоты и генератор импульсов со вторым входом фазочувствительного усилителя, и устройства задержки, связываквдего выход устройства сравнения положений со вторым входом регулятора частоты. Источники информации, принятые во внимание при экспертизе . 1. Авторское свидетельство СССР по заявке № 2671587/25-27,кл. В 21 J 5/08 , 1978.
Ox
11 i
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический импульсный привод кХОлОдНОВыСАдОчНОМу АВТОМАТу | 1979 |
|
SU841762A1 |
| Гидравлический импульсный привод к холодновысадочному автомату | 1978 |
|
SU730433A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВО,всссогознАЯр,- '-гч'-:-.'•'';[.'?|'.тгн»о. ..! ;; 1\^ )i..'Uiil iLunAji . Е'^^БЛИОТЕКА | 1971 |
|
SU309813A1 |
| Устройство для управления гидравлическим экскаватором | 1989 |
|
SU1778249A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1999 |
|
RU2161579C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ СУДОВОЙ ПАРОТУРБИННОЙУСТАНОВКИ | 1966 |
|
SU185721A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1971 |
|
SU307897A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| СИСТЕМА СОВМЕСТНОЙ РАБОТЫ НА ГРЕБНОЙ ВАЛ СУДНА ЖЕСТКО СВЯЗАННЫХ КИНЕЛиТИЧЕСКИ ГАЗОВОЙ ТУРБИНЫ | 1973 |
|
SU408857A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ДРОССЕЛЬНОГО РЕГУЛИРОВАНИЯ С ОДНОКАСКАДНЫМ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ УСИЛИТЕЛЕМ МОЩНОСТИ | 2007 |
|
RU2361122C2 |