54) ИНДУКЦИОННЫЙ РАМОЧШЛЙ ДАТЧИК ПЕРЕЖЩЕНИЙ
38
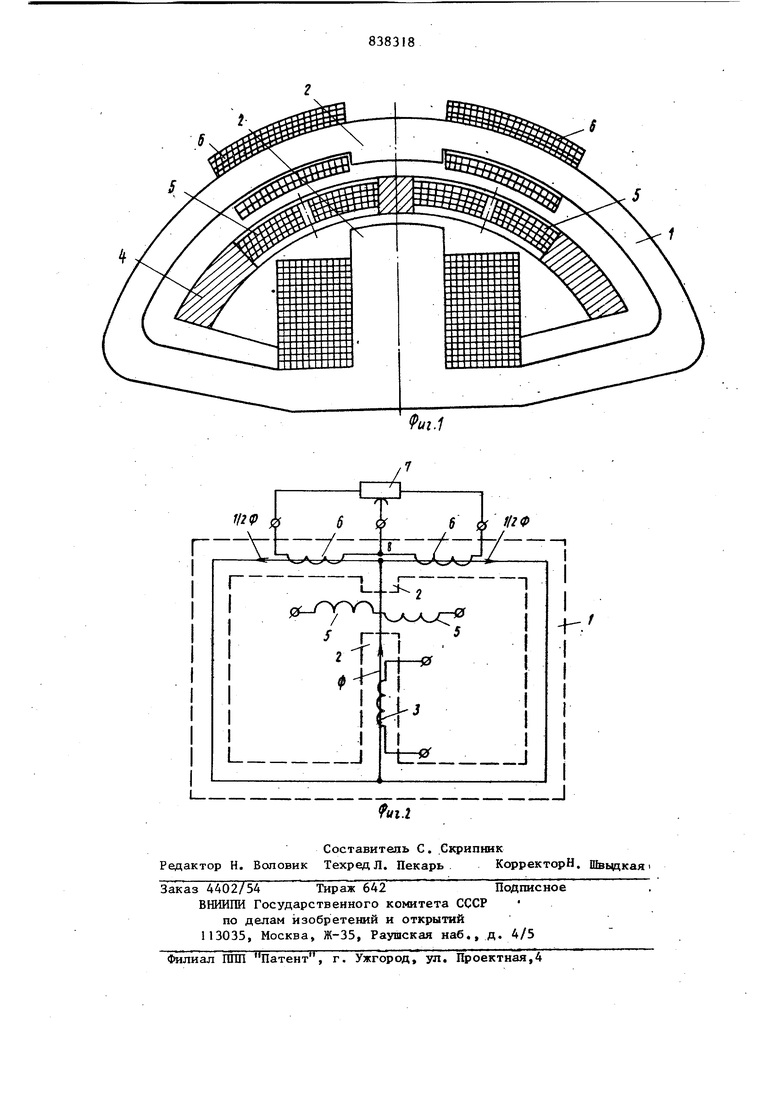
Индукционный рамочный датчик содержит статор, шихтованный магнитопровод 1 которого имеет в среднем стержне 2 разрез, образующий воздушный зазор. На этом же стержне 2 размещена обмотка 3 возбуждения. Ротор 4 датчика, размещенный в воздушном зазоре магнитопровода 1 статора несет на себе сигнальную обмотку 5, состоящую из двух катушек, соединенных последовательно встречно. На разветвленной части магнитопровода 1 размещены две вспомогательные обмотки 6, соединенные согласно последовательно и зашунтированные потенциометром 7,
подвижный контакт 8 которого подключе к точке соединения обмоток 6.
Индукционный рамочный датчик перемещений работает Следующим образом.
При подключении обмотки 3 возбуждения к источнику питания переменного поля (не показан)в магнитопроводе 1 статора возбуждается маг1штный поток Ф, наводящий ЭДС в катушках сигнальной обмотки 5, противоположные по фазе и различные по ве.личине в зависимостиот углового пере-мещения ротора 4.
В нулевом положении ротора в катушках сигнальной обмотки 6 наводится ос таточная ЭДС, обусловленная электрической и магнитной асимметрией элементов конструкции датчика. Компенсация амплитудной и фазовой несимметрии основной гармоники остаточного сигнала осуществляется с помощью вспомогательных обмоток 6 и потенцио184
метра 7. Перемещением подвижного контакта потенциометра 7 и изменением положения обмоток 6 на разветвленной части магнитопровода I уменьшают остаточный сигнал практически до нуля. После проведенной компенсации остаточного сигнала обмотки 6 и подвижный контакт 8 потенциометра 7 жестко фиксируют путем заливки клеем
Такое конструктивное выполнение индукционного рамочного датчика обеспечивает уменьшение-величины остаточного сигнала, а следовательно, повьш1ение стабильности выходного сигнала датчика и повьш1ение точности измерения перемещений.
IФормула изобретения
Индукционный рамочный датчик перемещений по авт. св. № 468088, о тличающийся тем, что, с целью снижения основной гармоники остаточного сигнала, датчик снабжен потенциометром и двумя обмотками, размещенньми на разветвленной части магнитопровода, соединенными согласно последовательно и зашунтированными потенциометром, подвижный контакт которого подключен к точке соединения обеих обмоток.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 468088, кл. Q 01 С 19/04, 1973 (прототип).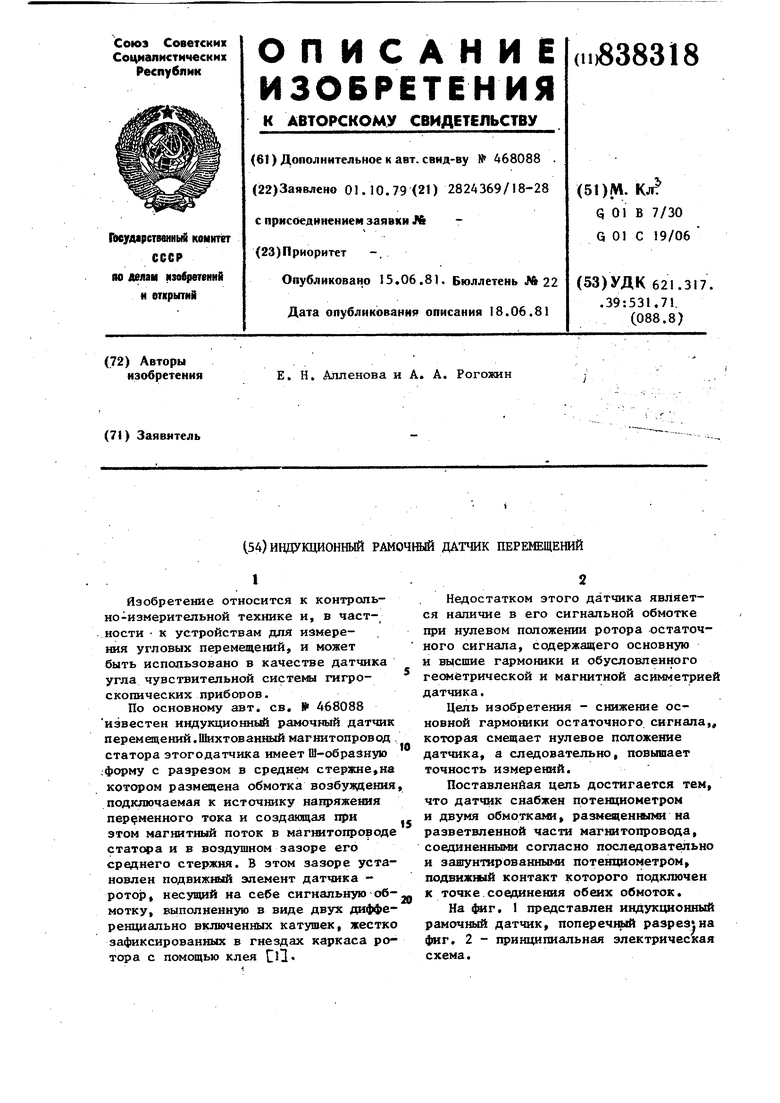
| название | год | авторы | номер документа |
|---|---|---|---|
| Индукционный рамочный датчик перемещения | 1980 |
|
SU974125A2 |
| Преобразователь угла рассогласования валов в напряжение | 1986 |
|
SU1336068A1 |
| Двухкоординатный датчик угла | 1985 |
|
SU1262274A1 |
| Вентильный электродвигатель | 1978 |
|
SU758416A1 |
| Совмещенный коллекторный двигатель-тахогенератор | 1988 |
|
SU1582288A1 |
| Соленоидный бесконтактный датчик контроля положения и перемещения протяженного тела с магнитными неоднородностями | 1980 |
|
SU903776A1 |
| Энергонезависимый датчик углового положения вала | 2023 |
|
RU2807016C1 |
| Индукционный рамочный датчик перемещения | 1973 |
|
SU468088A1 |
| Измерительный преобразователь постоянного тока | 1984 |
|
SU1253306A1 |
| ЭЛЕКТРОАГРЕГАТ | 1995 |
|
RU2112309C1 |