(54) ИНДУКЦИОННЫЙ РАМОЧНЫЙ ДАТЧИК ПЕРЕМЕИЩНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Индукционный рамочный датчик пе-РЕМЕщЕНий | 1979 |
|
SU838318A2 |
| Индукционный рамочный датчик перемещения | 1973 |
|
SU468088A1 |
| Датчик угловых перемещений | 1984 |
|
SU1234725A1 |
| ДАТЧИК МАГНИТНОГО ПОЛЯ | 1987 |
|
SU1500055A1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК УГЛОВОГО ПЕРЕМЕЩЕНИЯ | 1991 |
|
RU2006790C1 |
| ДАТЧИК УГЛА | 1971 |
|
SU309242A1 |
| ДВУХКООРДИНАТНЫЙ ДАТЧИК | 1971 |
|
SU294074A1 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ АБСОЛЮТНОЙ УГЛОВОЙ СКОРОСТИ | 2016 |
|
RU2621642C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |
| Способ измерения реактивного момента трансформаторных датчиков угла | 1979 |
|
SU905668A1 |
Изобретение относится к гироскопической технике, в частности к конструкциям датчиков угла и перемещения чувствительной системы гироскопических приборов.
По основному авт.св. № 468088 известен индукционный рамочный датчик перемещения, содержащий магнитопровод с катушкой возбуждения и каркас с размещенными в его окнах сигнальными обмотками, при этом в каркасе выполнены прорези Г 1.
Однако у известного датчика недостаточная точность из-за смещения его нулевого положения, так как в нулевом сигнале датчика присутствует основная гармоника, обусловленная геометрической и магнитной несимметрией датчика.
Цель изобретения - повышение точности и стабильности.
Поставленная цель достигается тем, что в индукционном рамочном датчике перемещения торец среднего стержня магнитопровода выполнен с двумя симметричными выступами, на каждом из которых закреплена дополнительная компенсационная обмотка.
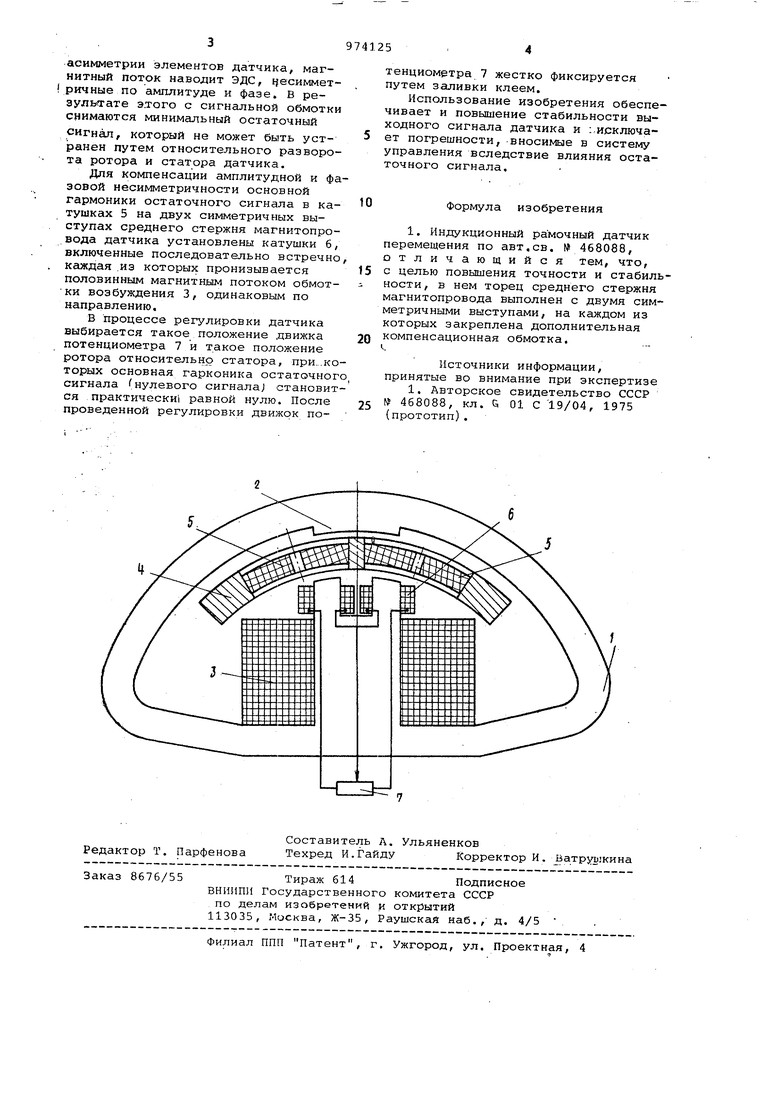
На чертеже изображен описываемый датчик.
Датчик перемещения состоит из статора и ротора. Статор содержит магнитопровод 1 броневого типа, представляющий собой шихтованный сердечник , .средний стержень 2 которого .разделен, воздушным зазором. На среднем стержне магнитопровода закреплена обмотка возбуждения 3. Ротор содержит каркас 4 и сигнальную
10 обмотку, состоящую из двух катушек 5, включенных последовательно встречно. На двух симметричных выступах среднего стержня магнитопровода установлены две катушки 6, включен15 ные встречно и зашунтированные потенциометром 7, движок которого соединен со средней точкой, образуя мостовую схему компенсации.
Датчик работает следующим обра20зом.
При подаче на обмотку возбуждения 3 питания в воздушном зазоре среднего стержня 2 создается магнитный поток, который в сигнальных катуш25ках 5 ротора, находящихся в зазоре, наводит ЭДС, противоположные по фазе.
В нулевом положении ротора относительно статора в катушках 5,
30 за счет магнитной и электрической
