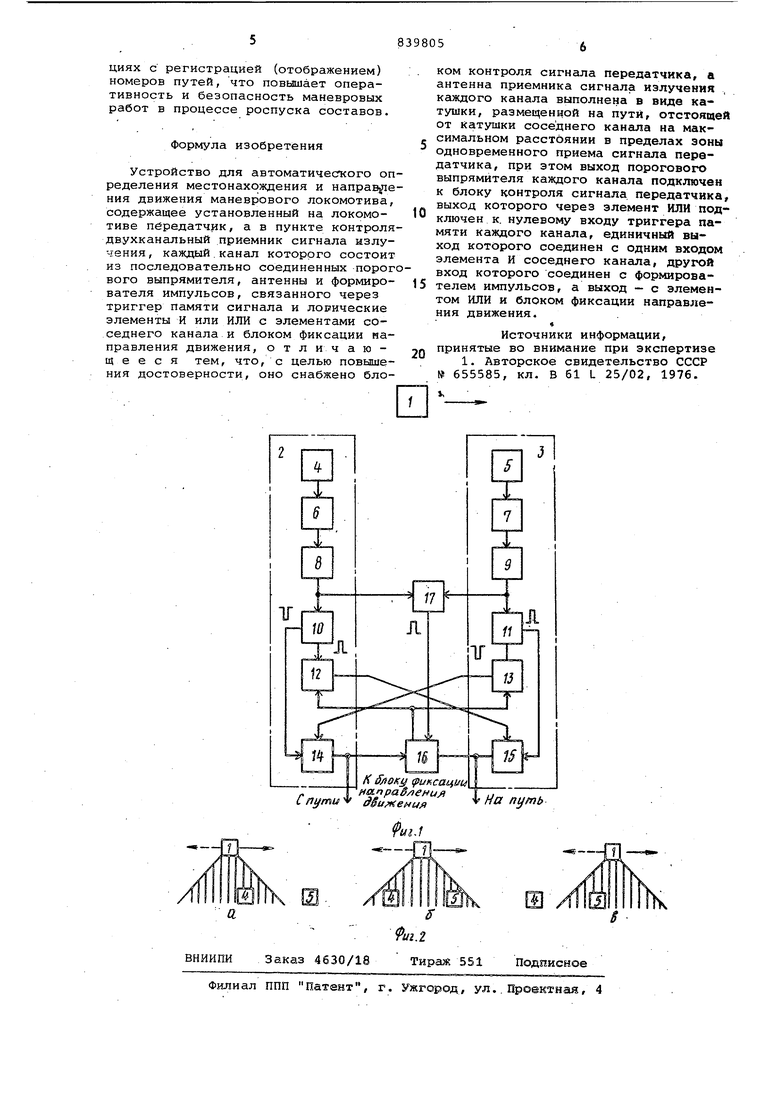
Изобретение относится к железнодорожной автоматике и может быть использовано для автоматического ввода и отображения на табло информации о местонахождении маневровых локомотивов по путям подгорочного парка, на спусковой части горки, в парке приема, на вытяжке, а также формирования управляющих команд при автоматизации технологического процесса работы на станции. Известно устройство для автоматического определения местонахождения и направления движения маневрового локомотива, содержащее установленгаай на локомотиве передатчик, а в пункте контроля - двухканальный приемник сигнала излучения, каждалй канал которого состоит из последовательно соединенных антенны и порогового выпряг ителя и формирователя импульсов связанного через триггер памяти сигнала и логические элементу И и ИЛИ с элементами соседнего каигшй и блоком фиксации направления движения 111 Недостатком известного устройства является потеря оценки направле ния движения локомотива по станции после того, как он остановится на пути над зоной размещения приемника. Цель изобретения - повышение достоверности работы устройства. Поставленная цель достигается тем, что устройство снабжено блоком контроля сигнала передатчика, а антенна приемника сигнала излучения каждого канала выполнена в виде катушки, размещенной на пути., отстоящей от катушки соседнего канала, размещенной на том же пути, на максимашьном расстоянии в пределах зоиы одновременного приема сигнала передатчика, при этом выход порогового выпрямителя каждого канала подключен к блоку контроля сигнала передатчика, выход которого через элемент ИЛИ подключен к нулевому входу три -гера памяти каждого канала, единичный выход которого соединен с одним входом элемента И соседнего канала, другой вхо которого соединен с формирователем импульсов, а выход - с элементом ИЛИ и с блоком фиксации направления движения. На фиг. 1 представлена функциональнгш схема устройства; на фиг.2 варианты расположения маневрового локомотива относительно приемников излучения. Устройство содержит одночастотны передатчик 1, размещенный на маневровом локрмотиве, и приемник, состоя щий, из двухканальной аппаратуры и размещенный в пункте контроля. Каждый канал 2, 3 содержит катушку 4, для приема сигнала излучения, подключенную через фильтр-усилитель б, к пороговый выпрямитель 8, 9 к формирователю 10, 11 импульсов. Выход формирователя 10, 11 импульсов подключен к триггеру 12, 13 памяти и к элементу И 14, 15, другой выход которого подключен к выходу триггера 12, 13 памяти, подключенного к выходу элемента ИЛИ 16, на вход которого подключен выход блока 17 контро ля сигнала передатчика, а выход элемента И 14, 15 подключен к другому входу элемента ИЛИ 16 и является вхо дом блока фиксации направления движения (на чертеже не показан). На фиг. 2 показано размещение локомотивного одночастотного передатчика и его зоны распространения излу чаемой энергии. При последовательном перемещении передатчика в зоне уверенного приема его сигнала сказывают ся последовательно катушки 4 и 5 каж дого канала сигнала излучения. Устройство работает следующим образом. Приемные катушки 4 и 5 четного и нечетного каналов размещаются в начале пути. При заезде локомотива на путь (направление показано стрелкой под воздействием энергии сигнала передаваемой частоты, поступающей с передатчика 1, наво;цится ЭДС в катушке 4 четного канала 2. С выхода усилителя 6, при достижении установленного порогового значения, сигнал вь;прямляется (схемой 8) и поступает в формирователь 10 -и блок 17 контроля. Передний фронт выпрямленного сиг нала передатчика формирует положительный импульс, устанавливающий три гер 12 в рабочее состояние. Триггер 12 открывает по первому входу элемент И 15 канала 3. При движении локомотива, через некоторое время аналогичным образом срабатывает нечетный канал 3. В этом случае положительный импульс передне го фронта сигнала передатчика 1 с формирователя 11 открывает элемент И 15 канала 3. На выходе элемента И 15 нечетного канала формируется сигнал занятости пути На путь, поступающий на блок фиксации направления движения. Этим сигналом через элемент ИЛИ 16 триггер 12 четного канала 2 устанавливается в исходное состояние. При дальнейшем движении локомотива последовательное появление отрица тельных импульсов (задний фронт сигнала передатчика 1) на выходе формирователей 10 и 11 каналов 2 и 3 не приводит к появлению рабочих сигналов , так как импульс формирователя 10 канала 2 прекращает свое воздрйствие на элемент И 14 четного-канала 2 раньше, чем перебрасывается триггер 13 нечетного канала 3. Прекращение действия сигнала передатчика 1 на обе катушки 4 и 5 формирует на выходе блока 17 контроля сигнал установки триггеров 12 и 13 в исходное состояние. Сигнал освобождения пути(С пути) формируется на выходе элемента 14 и четного канала 2 в последовательности, Аналогичной описанной выше, при условии, что сначала-работает канал 3, а затем канал 2. Формирование сигнала С пути в отличие от сигнала На путь производится отрицательными импульсами, соответствующими заднему фронту сигнала передатчика. Это обеспечивает соответствие информации истинному положению локомотива на пути. Кроме сквозного проезда локомотив может остановиться над зоной размещения катушек 4 и 5 на неограниченное время и после этого начать движение в любом направлении. При этом возможны три варианта заезда на путь: 1.Сигнал передатчика 1 принят только чет.ным каналом 2 (фиг. 2а) , после чего направление движения изменяется. Сигнал На путь не выдается. С уходом локомотива с пути блок 17 контроля возвращает триггер 12 четного канала 2 в исходное состояние. 2.Сигнал передатчика 1 принят обоими каналами (фиг. 26). Формируется сигнал занятости пути(На путь). Триггеры 12 и 13 в исходном состоянии. При изменении направления движения формируется сигнал С пути. Устройство устанавливается в. исходное состояние. 3.Сигнал передатчика 1 принят обоими каналами, но катушка 4 четного канала 2 свободна от воздействия сигнала передатчика 1 (фиг. 2в), Сформирован сигнал. На . путь. При изменении направления движения формируется сигнал С пути. Устройство устанавливается в исходное положение. При остановках локомотива над зоной размещения катушек 4 и 5 приемника при освобождении пути и последующем измении направления движения в любом из аналогичных (фиг. 2) вариантов сигнал освобождения пути не формируется. Предлагаемое устройство обеспечивает автоматизацию накопления оперативно-технической информации о местонахождении маневровых и горочных локомотивов на сортировочных стан
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического определения местонахождения и направления движения маневрового локомотива | 1991 |
|
SU1792865A1 |
| Устройство для определения координаты локомотива | 1990 |
|
SU1832093A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ МЕСТОНАХОЖДЕНИЯ МАНЕВРОВОГО ЛОКОМОТИВА | 1990 |
|
RU2026223C1 |
| Устройство для контроля проследования маневрового локомотива | 1989 |
|
SU1794748A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЗАПОЛНЕНИЯ ПУТИ | 1991 |
|
RU2025357C1 |
| Система обмена информацией между локомотивом и диспетчерским пунктом | 1989 |
|
SU1787853A1 |
| Устройство для определения местонахождения локомотива | 1989 |
|
SU1801846A1 |
| Устройство для контроля местоположения локомотива | 1990 |
|
SU1794765A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЗАПОЛНЕНИЯ ПУТИ | 1991 |
|
RU2022854C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЛОКОМОТИВОВ ПРИ МАНЕВРОВОЙ РАБОТЕ | 2014 |
|
RU2567099C1 |
