Изобретение относится к средствам автоматизации конвейерного транспорта и может быть использовано для измерения величины проскальзывания ленты и скорости конвейера в системах автоматизированного управления ленточными конвейерами с регулируемым приводом и автоматическим регулированием натяжения ленты.
Известно устройство для контроля пробуксовки ленты конвейера относительно приводного барабана, использующее цифровые методы контроля и интегральные микросхемы, содержащее датчик вращения приводного шкива, датчик движения тягового органа, формирователи импульсов, счетчики, дешифраторы и пороговые элементы.
Сравнение частотных сигналов, пропорциональных скоростям приводного барабана и ленты конвейера, выполняется на суммирующих счетчиках импульсов, на счетные входы которых подаются импульсы с выхода датчиков 1..
Однако время измерения проскальзывания в известном устройстве значительно, так ,как . определяется временем заоелнения эталонного счетчика, который выдает сигнал на окончание цикла измерения. К тому же оно не обеспечивает выделения непрерывного сигнала, пропорционального текущему значению проскальзывания, что затрудняет его использование в системах с автоматическим регулированием натяжения ленты.
Известно также устройство для измерения величины проскальзывания ленты конвейера, содержащее импульсные датчики скорости приводного барабана и ленты конвейера, формирователи импульсов умножитель частоты, счетчик импульсов и дешифратор 2.
Однако известное устройство также не обеспечивает точного контроля величины проскальзывания ленты, так как время измерения проскальзывания определяется частотой импульсов с датчика скорости приводного барабана, которая не может быт№ увеличена выше предела, огращ1ченного конструкцией датчика. С уменьшением скорости конвейера уменьшается частота импульсов с датчика скорости приводного барабана, соответственно увеличивается .время измерения и уменьшается быстродействие устройства. Кроме того, устройство не позвояет выделить аналоговый сигнал, пропорциональный проскальзыванию.
Цель изобретения - повышение точноети измерения.
Цель достигается тем, что устройство для измерения величины проскальзывания ленты конвейера, содержащее импульсные датчики скорости приводного барабана и ленты конвейера, формирователи импульсов умножитель частоты, счетчик импульсов и дешифратор, снабжено эталонным генератором, вторым умножителем частоты, двумя элементами И, вторым счетчиком импульсов, блоком управления счетчиками, двумя блоками памяти, двумя преобразователями код аналог, двумя сумматорами, двумя узлами контроля датчиков скорости, пороговыми элементами и измерительными приборами, причем вход блока управления счетчиками подсоединен к выходу эталонного генератора и одним из входов элементов И, вторые входы которых подсоединены к выходам умножителей частоты, а выходы элементов И подсоединены к счетным входам счетчиков, к входам сброса ко.торых подсоединен первый выход блока управления счетчиками, второй выход которого подсоединен к управляющим входам блоков памяти, информационные входы которых подсоединены к соответствующим выходам счетчиков, а выходы блоков памяти - к соответствующим входам преобразователей код-аналог, выходы которых подсоединены к входам первого сумматора, выход которого подсоединен к первому, второму и третьему пороговым элементам и одному из измерительных приборов, выход первого преобразователя код-аналог подсоединен к пятому и шестому пороговым элементам, другому измерительному прибору и второму входу второго сумматора, на первый вход которого подается опорное напряжение, а выход подсоединен к четвертому пороговому элементу, выходы формирователей импульсов подсоединены к узлам контроля импульсных датч,иков.
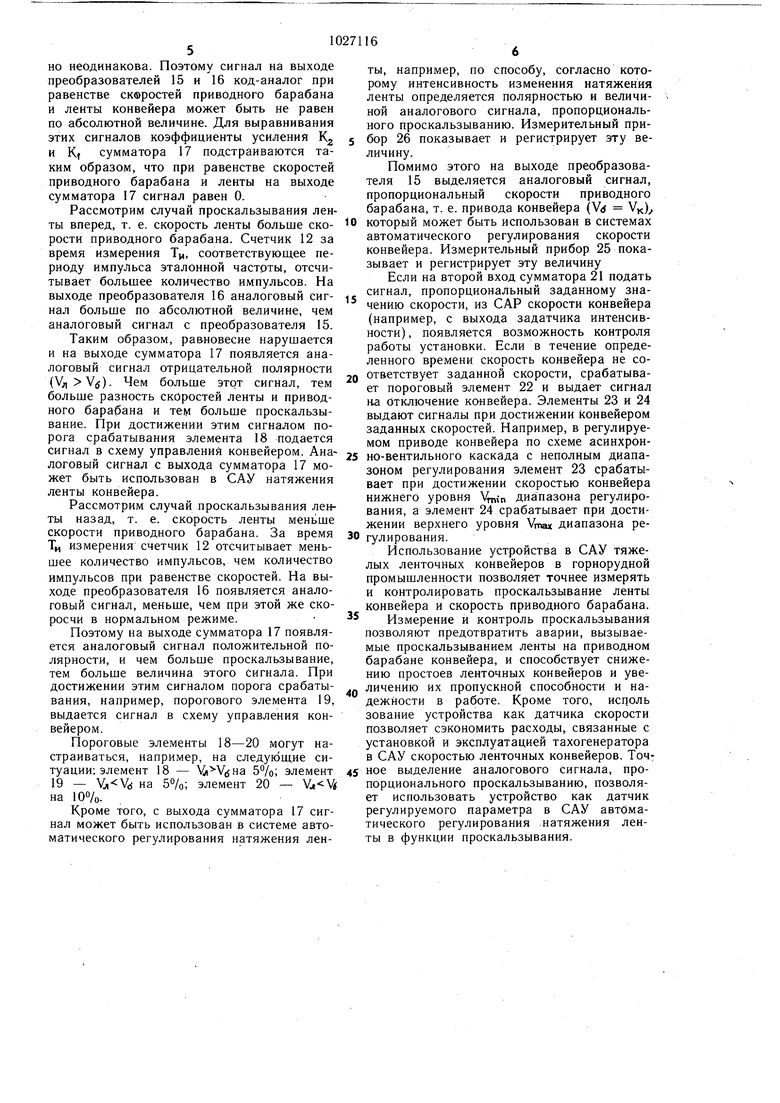
На фиг. 1 изображена функциональная схема предлагаемого устройства; на фиг. 2- временные диаграммы работы устройства.
Устройство для измерения величины проскальзывания ленты конвейера с регулируемым приводом содержит датчик 1 скорости вращения приводного барабана и датчик 2 скорости движения ленты конвейера, кинематически связанные с приввдаым барабаном и лентой, соответственно, формирователи 3 и 4 импульсов датчика скорости барабана и ленты, умножители 5 и 6 частоты, узлы 7 и 8 контроля цепей импульсных датчиков, логические элементы И 9 и 10, выходы которых подсоединен к счет ным входам счетчиков 11 и 12, соответственно блоки 13 и 14 памяти, преобразователи 15 и 16 код-аналог, первый сумматор 17, пороговые элементы 18-20, второй сумматор 21, пороговые элементы 22-24,, измерительные приборы 25 и 26, эталонный генератор 27 и блок 28 управления счетчиками.
Устройство работает следующим обра30 М.
При движении ленты и барабана датчики 1 и 2 вырабатывают импульсные сигналы, частота которых пропорциональна скоростям ленты и барабана, соответственно
-t- -ifi-|«fe-i,
где fpfjj - частота сигналов с импульсных
датчиков 1 и 2 соответственно,
V(} - линейная скорость поверхности
приводного барабана, м/с; Ун -линейная скорость ленты конвейера, м/с;
коэффициенты пропорциональности;
п -«угловая скорость приводного барабана, об/мин; Пд -угловая скорость датчика перемещения ленты, об/мин; Пев, количество импульсов, снимаемых с датчика 1 за один оборот приводного барабана; NflSj-количество импульсов, снимаемых
с датчика 2 за один оборот. Сигналы с датчиков 1 и 2 поступают на формирователи 3 и 4 импульсов, которые формируют импульсы правильной прямоугольной формы (фиг. 2 а и б). С выхода формирователей импульсов сигналы поступают на умножители 5 и 6 частоты, которые увеличивают частоту сигнала в m раз (фиг. 2 в и г).
f| fi-m,-m,. . f fz-mz т., No6j-, где tn,,nij-коэффициенты умножителей частоты, которые выбираются или nij nij, или , так как частота импульсов с выхода датчика 2 скорости ленты меньше, чем частота импульсов с выхода датчика 1 скорости приводного барабана.
С выхода умножителей 5 и 6 частоты импульсные сигналы поступают на вход логических элементов И 9 и 10, которые выполняют функции ключей и запрещают дальнейшее прохождение сигнала при отсутствии сигнала на втором входе, связанном с выходом эталонного генератора. Время, в течение которого разрешается прохождение импульсного сигнала, т. е. время измерения Т, определяется частотой эталонного генератора (фиг. 2, д).
Сигнал с эталонного генератора 27 поступает также на вход блока 28 управления счетчиками, который состоит из элементов Э и ЭгБлок управления выдает сигналы на запись сод,ержимого счетчиков. 11 и 12 в блоки 13 и 14 памяти и сигналы сброса счетчиков 11 и 12.
Элемент Э, выделяет короткий импульс, соответствующий положительному фронту импульса эталонной частоты (фиг. 2ж), а элемент Sj выделяет короткий импульс, соответствующий отрицательному фронту импульса эталонной частоты (фиг. 2 е). При появлении на выходе эталонного генератора 27 положительного фронта импульса эта,лонной частоты разрешается прохождение импульсных сигналов через логические элементы И 9 и 10. В этот момент короткий импульс с элемента Э блока 28 управления поступает на входы сброса счетчиков 11 и 12 и приводит их в исходное состояние. Счетчики И и 12 начинают счет импульсов, приходящих с выхода логических элементов 9 и 10 соответственно (фиг. 2, з и). При снятии импульса эталонной частоты логические элементы И 9 и 10 запрещают прохождение импульсов с выхода датчиков 1 и 2 на счетчики IT и 12, при этом прекращается счет импульсов. Элемент Э; в это время выделяет короткий импульс, который подается на управляющие входы блоков 13 и 14 памяти. В этот момент показания счетчиков соответствуют количеству подсчитанных за время Т импульсов N« f{;TH m,, -Sl-Тм; N,2 4 Т„ т2Ыой -| Ти.
Они записываются в блоки 13 и 14 памяти и преобразуются преобразователями 15 и 16 в аналоговые сигналы (фиг. 2, к ил).
При следунэщем появлении положительного фронта импульса эталонной частоты блок 28 управления, в частности элемент Эь выделяет короткий импульс и подает его-на сброс счетчиков И и 12, при этом они возвращаются в исходное состояние и начинается новый цикл измерения.
Для повышения точности измерения и быстродействия время ЛТ между отрицательным фронтом импульса эталонной частоты и последующим положительным фронтом импульса эталонной частоты уменьшено до минимально возможного. Оно должно быть намного меньше, чем время между двумя импульсами с выхода умножителей частоты, но достаточное для записи в память показаний счетчиков и их сброса.
Поэтому импульсы эталонной частоты имеют форму, показанную на фиг. 2 д. С выхода преобразователей 15 и 16 аналоговые сигналы, пропорциональные скоростям приводного барабана и ленты, подаются на сумматор 17 U,s а ш, Nod, - Т„; и,б-аш2Ыой2-|3-Т„; гдео-коэффициент преобразования сигнала из кода в аналоговый сигнал
Сумматор 17 выполняет функцию алгебраич,еского сложения поступаюших на его вход сигналов, т. е. выделяет аналоговый сигнал, пропорциональный разности скоростей приводного барабана и ленты конвейера, или сигнал, пропорциональный проскальзыванию
Us и„ и,5 - и« К, V, -K,V . Частота сигналов от датчиков 1 и 2 обычно неодинакова. Поэтому сигнал на выходе преобразователей 15 и 16 код-аналог при равенстве скоростей приводного барабана и ленты конвейера может быть не равен по абсолютной величине. Для выравнивания этих сигналов коэффициенты усиления К и Kf сумматора 17 подстраиваются таким образом, что при равенстве скоростей приводного барабана и ленты на выходе сумматора 17 сигнал равен 0.
Рассмотрим случай проскальзывания ленты вперед, т. е. скорость ленты больше скорости приводного барабана. Счетчик 12 за время измерения Т, соответствующее периоду импульса эталонной частоты, отсчитывает большее количество импульсов. На выходе преобразователя 16 аналоговый сигнал больше по абсолютной величине, чем аналоговый сигнал с преобразователя 15.
Таким образом, равновесие нарушается и на выходе сумматора 17 появляется аналоговый сигнал отрицательной полярности (Vj,Vtf). Чем больше этот сигнал, тем больше разность скоростей ленты и приводного барабана и тем больше проскальзывание. При достижении этим сигналом порога срабатывания элемента 18 подается сигнал в схему управления конвейером. Аналоговый сигнал с выхода сумматора 17 может быть использован в САУ натяжения ленты конвейера.
Рассмотрим случай проскальзывания ленты назад, т. е. скорость ленты меньше скорости приводного барабана. За время Т„ измерения счетчик 12 отсчитывает меньшее количество импульсов, чем количество импульсов при равенстве скоростей. На выходе преобразователя 16 появляется аналоговый сигнал, меньше, чем при этой же скоросчи в нормальном режиме.
Поэтому на выходе сумматора 17 появляется аналоговый сигнал положительной полярности, и чем больше проскальзывание, тем больше величина этого сигнала. При достижении этим сигналом порога срабатывания, например, порогового элемента 19, выдается сигнал в схему управления конвейером.
Пороговые элементы 18-20 могут настраиваться, например, на следук)ш,ие ситуации: элемент 18 5%; элемент 19 - на 5%; элемент 20 - V,4 на 10%.
Кроме того, с выхода сумматора 17 сигнал может быть использован в системе автоматического регулирования натяжения ленты, например, по способу, согласно которому интенсивность изменения натяжения ленты определяется полярностью и величиной аналогового сигнала, пропорционального проскальзыванию. Измерительный прибор 26 показывает и регистрирует эту величину.
Помимо этого на выходе преобразователя 15 выделяется аналоговый сигнал, пропорциональный скорости приводного барабана, т. е. привода конвейера (Vrf VK) который может быть использован в системах автоматического регулирования скорости конвейера. Измерительный прибор 25 показывает и регистрирует эту величину
Если на второй вход сумматора 21 подать сигнал, пропорциональный заданному значению скорости, из САР скорости конвейера (например, с выхода задатчика интенсивности) , появляется возможность контроля работы установки. Если в течение определенного времени скорость конвейера не соответствует заданной скорости, срабатывает пороговый элемент 22 и выдает сигнал на бтключение конвейера. Элементы 23 и 24 выдают сигналы при достижении конвейером заданных скоростей. Например, в регулируемом приводе конвейера по схеме асинхронно-вентильного каскада с неполным диапазоном регулирования элемент 23 срабатывает при достижении скоростью конвейера нижнего уровня диапазона регулирования, а элемент 24 срабатывает при достижении верхнего уровня Vmsai диапазона регулирования.
Использование устройства в САУ тяжелых ленточных конвейеров в горнорудной промышленности позволяет точнее измерять и контролировать проскальзывание ленты конвейера и скорость приводного барабана.
Измерение и контроль проскальзывания позволяют предотвратить аварии, вызываемые проскальзыванием ленты на приводном барабане конвейера, и способствует снижению простоев ленточных конвейеров и увеличению их пропускной способности и надежности в работе. Кроме того, исцоль зование устройства как датчика скорости позволяет сэкономить расходы, связанные с установкой и эксплуатацией тахогенератора в САУ скоростью ленточных конвейеров. Точное выделение аналогового сигнала, пропорционального проскальзыванию, позволяет использовать устройство как датчик регулируемого параметра в САУ автоматического регулирования натяжения ленты в функции проскальзывания.
V,
5
ппппппппппппп
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для многоканальной магнитной записи и воспроизведения сигналов с коррекцией временных искажений | 1990 |
|
SU1777178A1 |
| Устройство контроля скорости и проскальзывания ленты конвейера | 1988 |
|
SU1574513A1 |
| Устройство контроля обрыва и пробуксовки ленты конвейера | 1979 |
|
SU876538A1 |
| Устройство для измерения объемной массы транспортируемого конвейером материала | 1987 |
|
SU1478051A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСПРАВНОСТИ ТОРМОЗНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2453454C1 |
| Реле пробуксовки ленточного конвейера | 1972 |
|
SU472076A2 |
| Устройство для управления многобарабанной, подъемно-транспортной установкой | 1977 |
|
SU899426A1 |
| Система позиционирования электропривода с энергетической оптимизацией при двухзонном регулировании скорости | 1991 |
|
SU1820361A1 |
| Устройство контроля скорости и проскальзывания ленты конвейера | 1987 |
|
SU1479394A1 |
| Устройство для контроля проскаль-зыВАНия лЕНТы ТРАНСпОРТЕРА | 1979 |
|
SU839915A1 |
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЕЛИЧИНЫ ПРОСКАЛЬЗЫВАНИЯ ЛЕНТЫ КОНВЕЙЕРА, содержащее импульсные датчики скорости приводного барабана и ленты конвейера, формирователи импульсов, умножитель частоты, счетчик импульсов и дешифратор, отличающееся тем, что, с целью повышения точности измерения, оно снабжено эталонным генератором, вторым умножителем частоты, двумя элементами И, вторым счетчиком импульсов, блоком управления счетчиками, двумя блоками памяти, двумя преобразователями коданалог, двумя сумматорами, двумя контроля датчиков скорости, пороговыми элементами и измерительными приборами, причем вход блока управления счетчиками подсоединен к выходу эталонного генератора и одним из входов элементов И, вторые входы которых подсоединены к выходам умножителей частоты, а выходы-элементов И подсоединены к счетным входам счетчиков, к входам сброса которых подсоединен первый выход блока управления счетчиками, второй выход которого подсоединен к управляюш,им входам блоков памяти, информа ционные входы которых подсоединены к соответствующим выходам счетчиков, а выходы блоков памяти - к соответствуюшим входам преобразователей код-аналог, выходы которых подсоединены к входам первого сумматора, выход которого подсоединен к первому, второму и третьему пороговым элементам и одному из измерительных приборов, выход первого преобразователя коданалог подсоединен к пятому и шестому пороговым элементам, другому измерительному прибору и второму входу второго сумматора, на пе-рвый вход которого подается опорное напряжение, а выход подсоединен к четвертому пороговому элементу, выходы формирователей импульсов подсоединены к узлам контроля импульсных датчиков.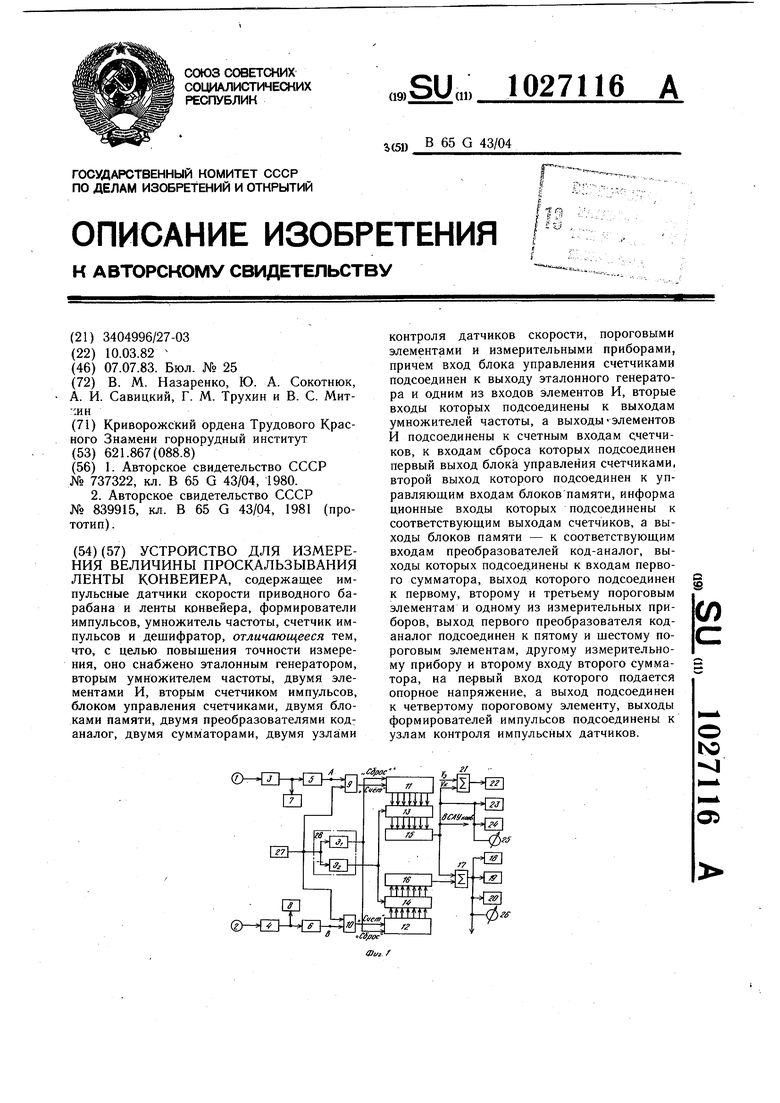
Фиг. г
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для контроля пробуксовки ленточного конвейера | 1978 |
|
SU737322A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для контроля проскаль-зыВАНия лЕНТы ТРАНСпОРТЕРА | 1979 |
|
SU839915A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
