38
частотой (до 500 колебаний в минуту)/ то контактный принцип подкачки пнев моамортизаторов не обеспечит достаточную надежность устройства в месте крепления рычага переключения к корпусу дробилки. Вследствие наличия трения в кинематических парах крепления рычага при большой частоте колебаний с повьшенной амплитудой будет происходить повьшенный износ звеньев механизма крепления рычага переключения к корпусу дробилки.
Цель изобретения - повьппение надежности устройства.
Указанная цель достигается тем, что устройство для автоматической подпитки пневмоамортизаторов, преимущественно конусной дробилки, содержащее золотники, каждый из которых посредством воздухопровода соединен с соответствующим пневмоаморти затором и оборудован взаимодействующим с корпусом дробилки рычагом переключения пневмоклапанов,.а также источник сжатого воздуха, подключенный к золотникам, снабжено постоянными магнитами, закрепленными на каждом рычаге и корпусе дробилки и расположенными соосно одноименными полю сами навстречу друг другу.
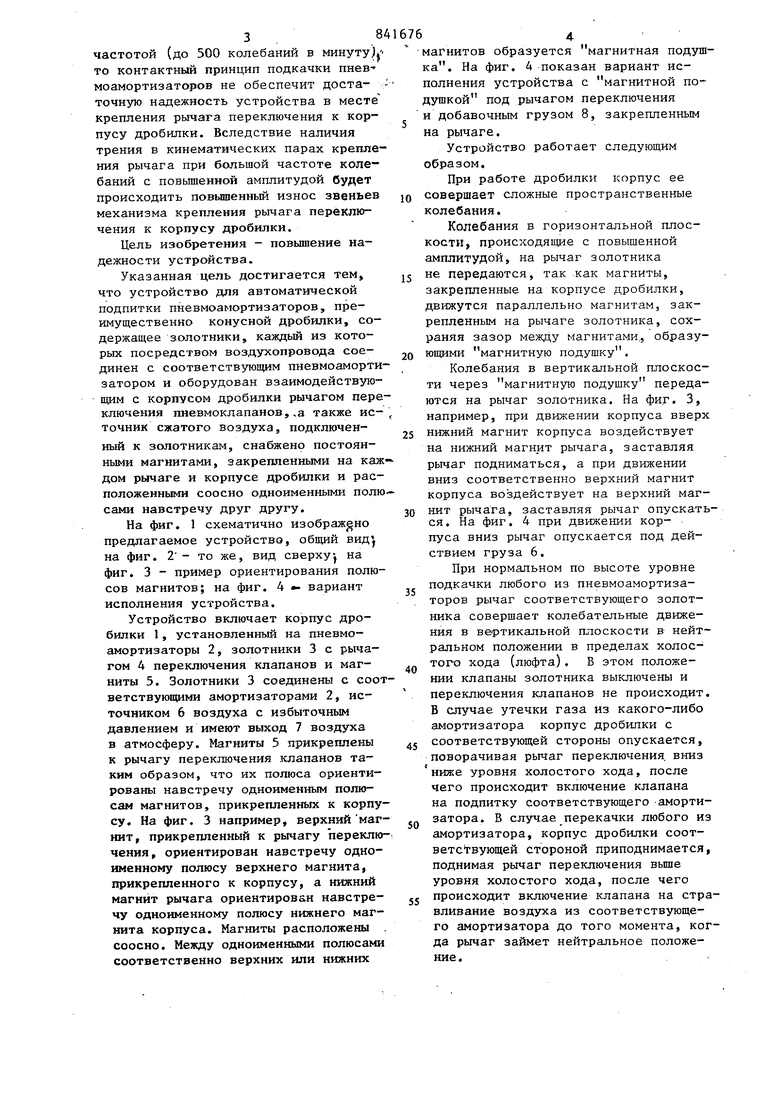
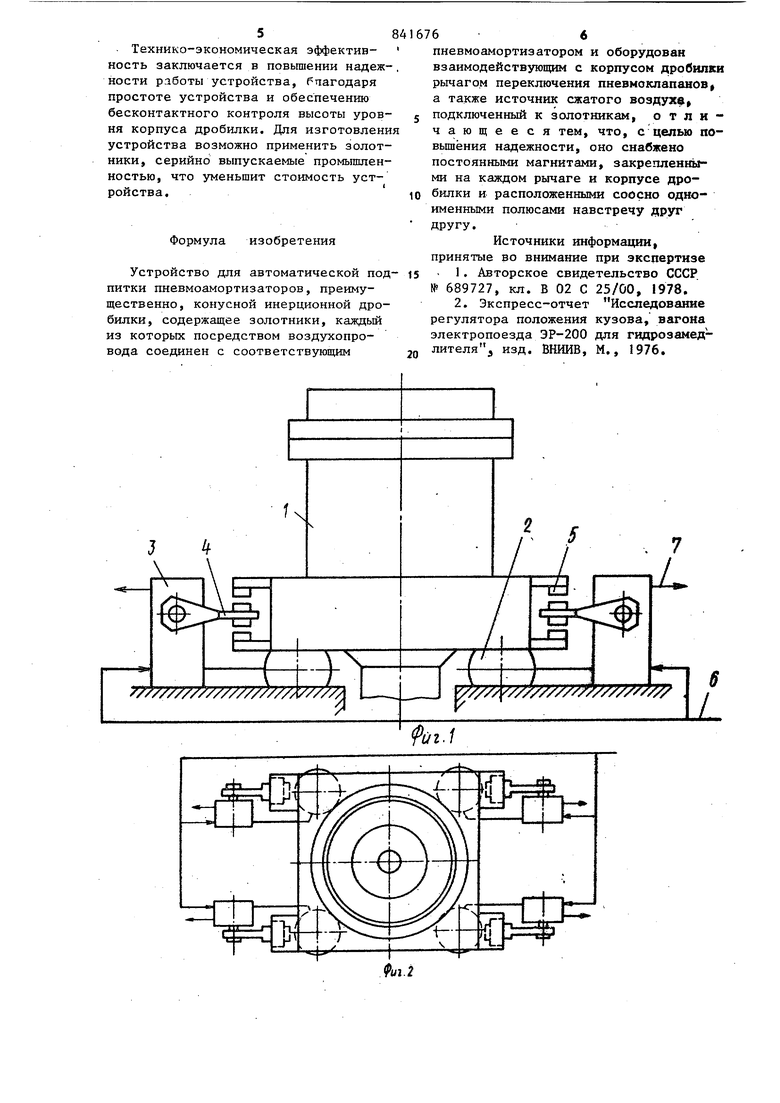
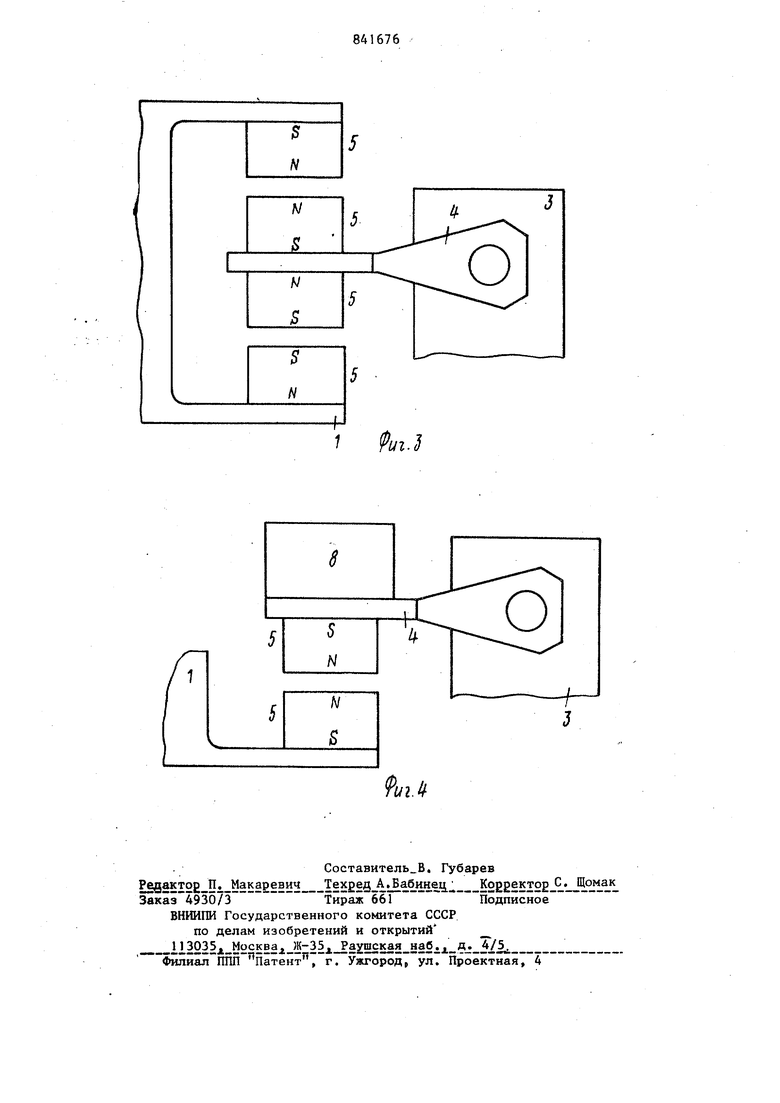
На фиг. 1 схематично изображено предлагаемое устройство, общий вид , на фиг. 2 - то же, вид сверху, на фиг. 3 - пример ориентирования полюсов магнитов; на фиг. 4 - вариант исполнения устройства.
Устройство включает корпус дробилки 1, установленный на пневмо- амортизаторы 2, золотники 3 с рычагом 4 переключения клапанов и магниты 5. Золотники 3 соединены с соответствующими амортизаторами 2, источником 6 воздуха с избыточным давлением и имеют выход 7 воздуха в атмосферу. Магниты 5 прикреплены к рычагу переключения клапанов таким образом, что их полюса ориентированы навстречу одноименным полюсам магнитов, прикрепленных к корпусу. На фиг. 3 например, верхниймагнит, прикрепленный к рычагу переключения, ориентирован навстречу одноименному полюсу верхнего магнита, прикрепленного к корпусу, а нижний магнит рычага ориентирован навстречу одноименному полюсу нижнего магнита корпуса. Магниты расположены , соосно. Между одноименными полюсами соответственно верхних или нижних
4
магнитов образуется магнитная подушка. На фиг. 4 показан вариант исполнения устройства с магнитной подушкой под рычагом переключения и добавочным грузом 8, закрепленным на рычаге.
Устройство работает следующим образом.
При работе дробилки корпус ее
совершает сложные пространственные колебания.
Колебания в горизонтальной плоскости, происходящие с повышенной амплитудой, на рычаг золотника
не передаются, так .как магниты, закрепленные на корпусе дробилки, движутся параллельно магнитам, закрепленным на рычаге золотника, сохраняя зазор между магнитами., образующими магнитную подушку.
Колебания в вертикальной плоскости через магнитную подушку передаются на рычаг золотника. На фиг. 3, например, при движении корпуса вверх
нижний магнит корпуса воздействует на нижний магнит рычага, заставляя рычаг подниматься, а при движении вниз соответственно верхний магнит корпуса во;здействует на верхний магнит рычага, заставляя рычаг опускаться . На фиг. 4 при движении корпуса вниз рычаг опускается под действием груза 6.
При нормальном по высоте уровне подкачки любого из пневмоамортизаторов рычаг соответствующего золотника совершает колебательные движения в вертикальной плоскости в нейтральном положении в пределах холостого хода (люфта), В зтом положении клапаны золотника выключены и переключения клапанов не происходит. В случае утечки газа из какого-либо амортизатора корпус дробилки с
соответствующей стороны опускается, поворачивая рычаг переключения, вниз ниже уровня холостого хода, после чего происходит включение клапана на подпитку соответствующего -амортизатора. В случае перекачки любого из амортизатора, корпус дробилки соответсгвующей стороной приподнимается, поднимая рычаг переключения вьппе уровня холостого хода, после чего
происходит включение клапана на стравливание воздуха из соответствующего амортизатора до того момента, когда рычаг займет нейтральное положение . Технико-экономическая эффективность заключается в повьппении надеж ности работы устройства, бпагодаря простоте устройства и обеспечению бесконтактного контроля высоты уровня корпуса дробилки. Для изготовлени устройства возможно применить золотники, серийно выпускаемые промьгашенностью, что уменьшит стоимость устройства. Формула изобретения Устройство для автоматической под питки пневмоамортизаторов, преимущественно, конусной инерционной дробилки, содержащее золотники, каждый из которых посредством воздухопровода соединен с соответствующим 6 6 пневмоамортизатором и оборудован взаимодействующим с корпусом дробилки рьиагом переключения пневмоклапанов а также источник сжатого воздухе подключенный к золотникам, отличающееся тем, что, с целью повьшёния надежности, оно снабжено постоянными магнитами, закрепленными на каждом рычаге и корпусе дробилки и расположенными соосно одноименными полюсами навстречу друг другу. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 689727, кл. В 02 С 25/00, 1978. 2. Экспресс-отчет Исследование регулятора положения кузова, вагона электропоезда ЭР-200 для гидрозамедлителя, изд. ВНИИВ, М., 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подпитки пневмоопор конусной дробилки | 1980 |
|
SU1107893A1 |
| Устройство для подкачки пневмоопор корпуса конусной дробилки | 1980 |
|
SU919728A1 |
| Устройство для подпитки пневмоопор конусной дробилки | 1981 |
|
SU1012975A1 |
| Устройство для подпитки резинокордных оболочек пневмоопор корпуса конусной дробилки | 1980 |
|
SU893249A1 |
| СПОСОБ ОЧИСТКИ ОТРАБОТАВШИХ ГАЗОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2306440C1 |
| УСТРОЙСТВО ДЛЯ ДЕМОНСТРАЦИИ ДЕЙСТВИЯ МАГНИТНЫХ СИЛ | 1992 |
|
RU2027226C1 |
| Гаситель механических колебаний кабины крана | 1990 |
|
SU1794866A1 |
| ПОЛУАВТОМАТ ДЛЯ МНОГОМЕРНОГО КОНТРОЛЯ ПОДШИПНИКОВ | 1990 |
|
RU2089846C1 |
| Линейный электрогенератор с толкателем-колесом | 2016 |
|
RU2644765C1 |
| ЭЛЕКТРИЧЕСКОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2012 |
|
RU2478048C1 |
1 /zJ
