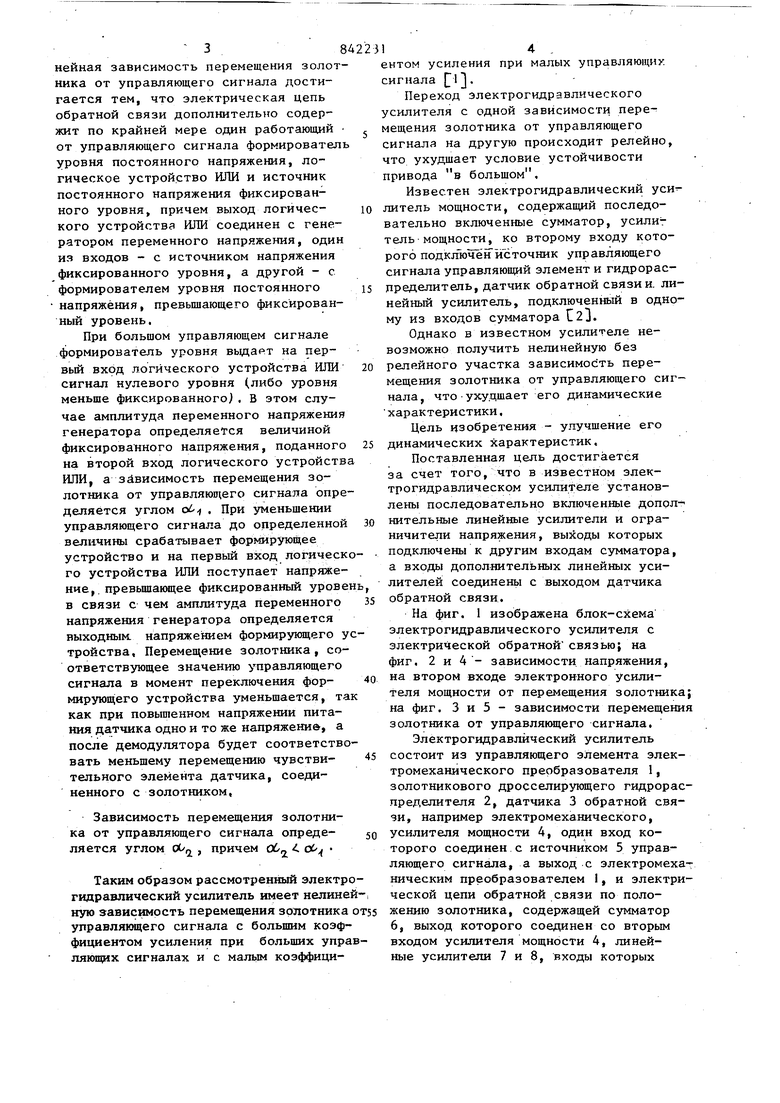
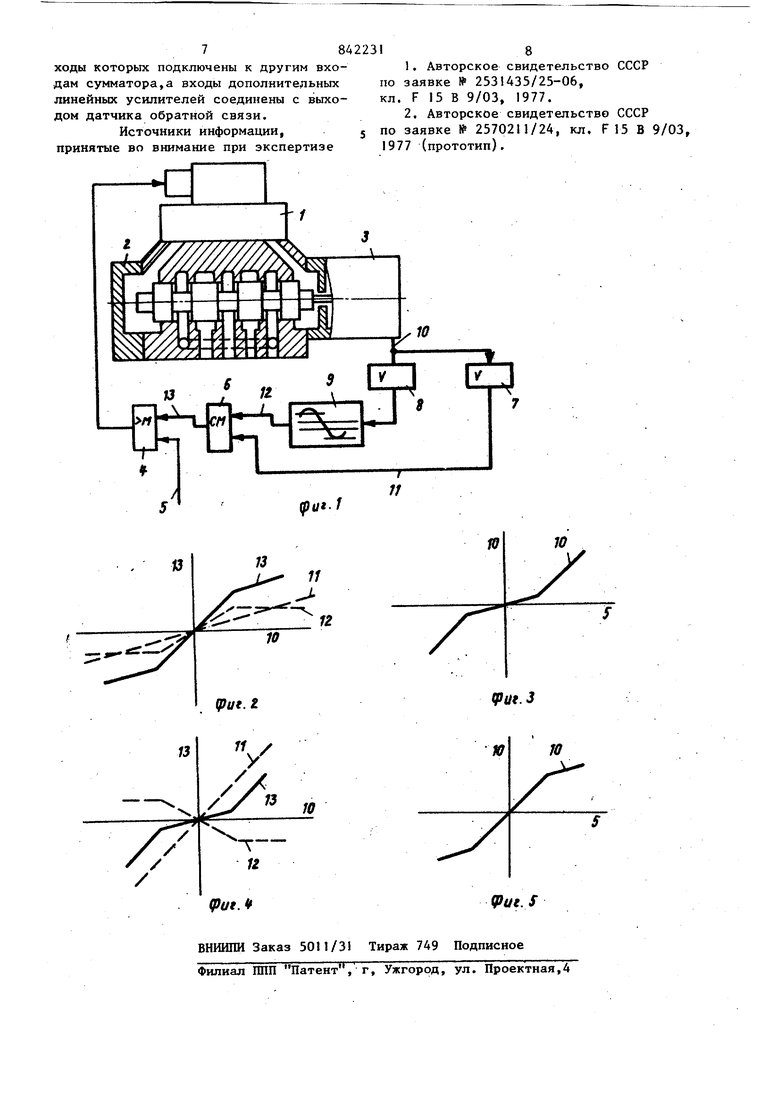
Изобретение относится к электрогидравлическим системам автоматического управления и может быть использ в&но в различных машинах и механизмах с гидравлическими исполнительными органами. Коэффициент усиления разомкнутого электрогидравлического привода является расчетной величиной, так как он определяет устойчивость и динамические характеристики привода. Поэтому допустимый коэффициент усиления электрогидравлического усилителя, т,е, отношение приращения расхода к приращению управляющего сигнала, обратно пропорционален произведению коэффициентов усиления остальных звеньев привода, из которых одно звено гидравлическое (гидродвигатель) , а остальные - электрические (электронный усилитель, канал обратной связи). Произведение коэффициентов усиления электрических звеньев определяет погрешность позиционирования привода, поэтому при наличии статизма в звеньях привода это произведение должно быть возможно большим. Следовательно, прог изведение коэффициентов усиления гидравлических звеньев должно быть таким, чтобы общий коэффициент усиления разомкнутого привода не превышал допустимой величины. Уменьшение коэффициента усиления гидродвигателя достигается увеличением его рабочего объема, что не может считаться оптимальным решением, поэтому малый коэффициент усиления должен быть электрогидравлический усилитель. Известен элёктрогидравлический усилитель мощности с электрической обратной связью, который содержит электромеханический преобразователь, электромеханический датчик положения золотника дросселирующего распределителя, генератор переменного напряжения, питающий датчик, в выходной цепи которого установлен демодулятор, Нели3нейная зависимость перемещения золот ника от управляющего сигнала достигается тем, что электрическая цепь обратной связи дополнительно содержит по крайней мере один работающий от управляющего сигнала формировател уровня постоянного напряжения, логическое устройство ИЛИ и источник постоянного напряжения фиксированного уровня, причем выход логического устройства ИЛИ соединен с генератором переменного напряжения, один из входов - с источником напряжения фиксированного уровня, а другой - с формирователем уровня постоянного напряжения, превышающего фиксированный уровень. При большом управляющем сигнале формирователь уровня выдает на первый вход логического устройства ИЛИ сигнал нулевого уровня (либо уровня меньше фикc.иpoвaннoгo , В этом случае амплитуда переменного напряжения генератора определяется величиной фиксированного напряжения, поданного на второй вход логического устройств ИЛИ, а зависимость перемещения золотника от управляю01его сигнала опре деляется углом о6 , При уменьшении управляющего сигнала до определенной величины срабатывает формирующее устройство и на первый вход логическ го устройства ИЛИ поступает напряжение,, превышающее фиксированный урове в связи с чем амплитуда переменного напряжения генератора определяется выходным, напряжением формирующего у тройства. Перемещение золотника, соответствующее значению управляющего сигнала в момент переключения формирующего устройства уменьщается, т как при повышенном напряжении питания датчика одно и то же напряжение, а после демодулятора будет соответств вать меньшему перемещению чувствительного элемента датчика, соединенного с золотником. Зависимость перемещения золотника от управляющего сигнала определяется углом ot/, , причем oL 4. csi Таким образом рассмотренный электр гидравлический усилитель имеет нелине кую зависимость перемещения золотника управляющего сигнала с большим коэф фициентом усиления при больших упр ляющих сигналах и с мальм коэффици14 . нтом усиления при малых управляющих сигнала 1. Переход электрогидравлического силителя с одной зависимости перемещения золотника от управляющего сигнала на другую происходит релейно, что ухудшает условие устойчивости привода в большом. Известен электрогидравлический усилитель мощности, содержащий последовательно включенные сумматор, усилитель мощности, ко второму входу которого подклТоченйсточник управляющего сигнала управляющий элемент и гидрораспределитепь, датчик обратной связи и. линейный усилитель, подключенный в одному из входов сумматора С23. Однако в известном усилителе невозможно получить нелинейную без релейного участка зависимость перемещения золотника от управляющего сигнала, ЧТОухудшает его динамические характеристики. Цель изобретения - улучшение его динамических характеристик. Поставленная цель достигается за счет того, что в известном электрогидравлическом усилителе установлены последовательно включеннь1е допрлнительные линейные усилители и ограничители напряжения, выходы которых подключены к другим входам сумматора, а входы дополнительных линейных усилителей соединень с выходом датчика обратной связи. На фиг, 1 изображена блок-схема электрогидравлического усилителя с электрической обратной связью; на фиг, 2 и А- зависимости, напряжения, на втором входе электронного усилителя мощности от перемещения золотника; на фиг, 3 и 5 - зависимости перемещения золотника от управлянщего сигнала. Электрогидравлйческий усилитель состоит из управляющего элемента электромеханического преобразователя 1, золотникового дросселирующего гидрораспределителя 2, датчика 3 обратной связи, например электромеханического, усилителя мощности 4, один вход которого соединен.с источником 5 управляющего сигнала, а выход с электромеханическим преобразователем 1, и электрической цепи обратной связи по положению золотника, содержащей сумматор 6, выход которого соединен со вторьм входом усилителя мощности 4, линейШ)1е усилители 7 и 8, входы которых
соединены с выходом датчика 3 положения золотника, выход усилителя 7 непосредственно соединен с одним из входов сумматора 6, а между выходом усилителя 8 и вторым входом сумматора 6 установлен ограничитель напряжения 9. Цепей, содержащих усилители напряжe: ия 8 и ограничители 9 в цепи обратной связи может быть несколько.
Элёктрогидравлический усилитель работает следующим образом.
Сигнал 10 пропорциональный перемещению золотника, поступает на входы усилителей напряжения 7 и 8. С выхода усилителя 7 напряжение 11 поступает на вход сумматора 7. Напряжение с выхода усилителя 8 ограничивается по амплитуде ограничителем напряжения 9 и в виде напряжения 12 поступает на второй вход сумматора 6.
Если напряжение 12 складывается с напряжением 11, то напряжение 13 на втором входе электронного усилителя мощности 4 имеет вид, показанный на фиг. 2. .
Тяк как напряжение 13 представляет собой напряжение обратной связи по положению золотника, то зависимость .перемещения золотника при линейном датчике-3, или эквивалентное перемеще нию напряжения 10 от управляющего сигнала 5, имеет вид, показанный на фиг. 3,
Если напряжение 12 вычитается из напряжения 11, .то напряжение 13 имеет вид, показанный на фиг. 4, а зависимость напряжения 10 от управляющего сигнала 5 изображена на фиг, 5,
Наклоны . участков характеристики определяются коэффициентами усиления усилителей 7 и 8 напряжения, устанавливаемыми при настройке электрогидравлического усилителя, реализующего требуемую из условий работы привода зависимость перемещения золотника от управляющего сигнала.
Напряжение на выходах усилителей напряжения 7 и 8 зависят от величины перемещения золотника, дросселирующего распредели.теля 2 и от настраиваемы величин коэффициентов усиления этих усилителей..
Как видно из графиков на фиг..3 и 5, предложенный электрогидравлический усилитель имеет нелинейную завйсимость перемещения золотника от управляющего сигнала, причем уменьшение или увеличение коэффициента
усиления при малых управляющих сигналах достигается инвертированием или неинвертированием сигнала после огра. ничения.напряжения.
Уменьшение коэффициента усиления электрогидравлического усилителя при малых управляющих сигналах (фиг, 2) приводит к стабилизации следящих приводов с большими инерционными нагрузками. Увеличение коэффициента усилен электрогидравлического усилителя при малых управляюи№1х сигнала (фиг. 5) позволяет при необходимости повысить статическую и динамическую жесткость следящего привода в зоне малых скоростей движения исполнительного органа.
Указанные зависимости не имеют релейного участка, что существенного .для стабилизации следящих электрогидравлическнх приводов, .
При установке нескольких цепей, состоящих из последовательно соединенных усилителя напряжения и ограничителя напряжения обеспечивается несколько коэффициентов усилителя элёктрогйдравлического усилителя без релейных участков.
Применение в известном электрогидраалическом усилителе с электрической обратной связью сумматора, двух усилителей напряжения ограничителя напряжения и соответствукицее их соединение позволяет получить нелинейную без релейного участка зависимость перемещения золотника от управляющего сигнала. Это, в свою очередь, позволяет стабилизировать элек1 рогидравлический привод при больших коэффициентах усиления его электрических звеньев, определяющих погрешность позиционирования привода.
Формула изобретения
Электрогидравлический усилитель, :содержащий последовательно включенные сумматор, усилитель мощности, ко второму входу которого подключен источник управляющего сигнала, управляющий элемент и гидрбраспределитель, датчик обратной связи и линейный усилитель, подключенный к одному из входов сумматора, отличающийс я тем, что, с целью улучшения динамических характеристик усилителя, в нем установлены последовательно включенные дополнительно линейные усилители и ограничители напряжения, вы

| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| Электрогидравлический усилитель мощности с электрической обратной связью | 1977 |
|
SU735831A1 |
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1999 |
|
RU2161579C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
| Способ автоматического регулирования частоты вращения ротора синхронного генератора и регулятор для его реализации | 2023 |
|
RU2823536C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2006 |
|
RU2311568C2 |
| Электрогидравлическая следящая система | 1980 |
|
SU924433A1 |
