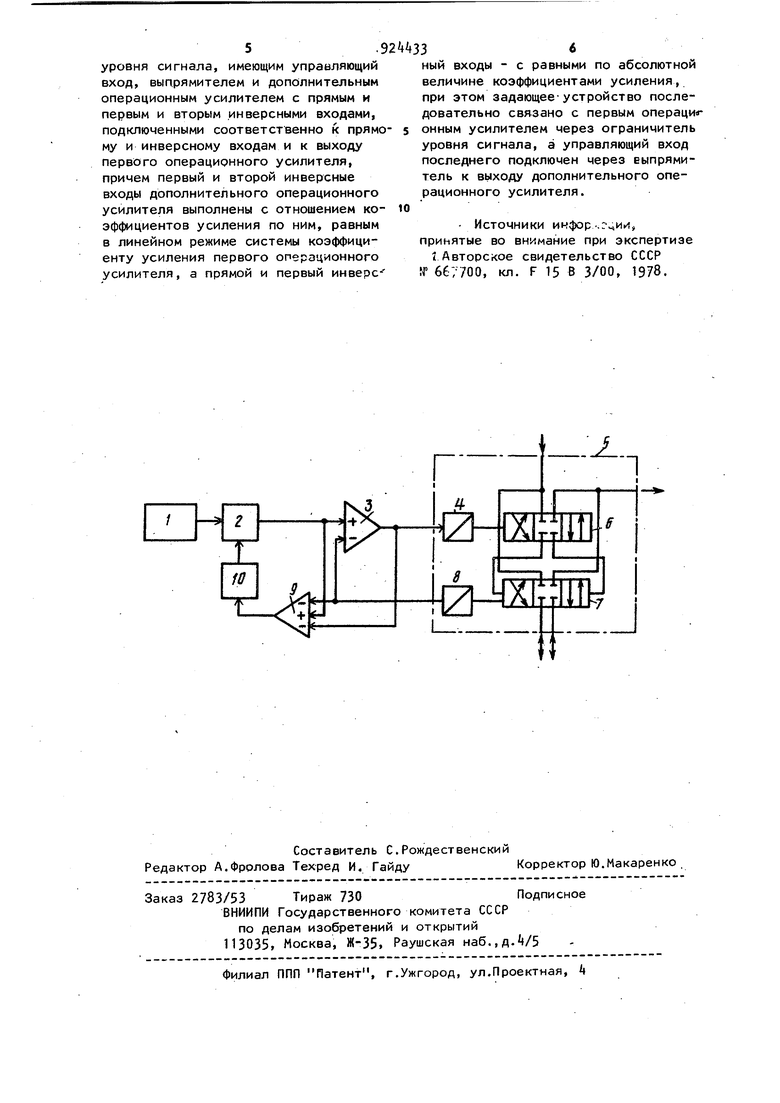
(S) ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ Изобретение относится к гидроавтоматике и может быть использовано,, например в электрогидравлических приводах вибростендов и в поверхностных источниках сейсмических сигналов вибрационного типа. Известна электрогидравлическая следящая система, содержащая последо вательно соединенные задающее устрой ство, первый операционный усилитель с прямым и инверсным входами, электромеханический преобразователь и гидроусилитель с распределительным золотником и датчиком обратной связи по положению последнего, подключенным к инверсному входу первого операционного усилителя 11. Недостатком известной системы яв ляется малая устойчивость вследствие возможности работы первого операцион ного усилителя в режиме ограничения выходного сигнала. СИСТЕМА Цель изобретения - повышение устойчивости системы. Указанная цель- достигается тем, что система снабжена ограничителем уровня сигнала, имеющим управляющий вход, выпрямителем и дополнительным операционным усилителем с прямым и первым и вторым инверсными входами, подключенными соответственно к прямому и инверсному входам и к выходу первого операционного усилителя, причем первый и второй инверсные входы дополнительного операционного усилителя .выполнены с отношением коэффициентов- усиления по ним, равным в линейном режиме системы коэффициенту усиления первого операционного усилителя, а прямой и первый инверсный входы - с равными по абсолютной величине коэффициентами усиления, при этом задающее устройство последовательно связано -С первым операционным усилителем через ограничитель уровня сигнала, а управляющий вход последнего подключен через выпрямитель к выходу дополнительного операционного усилителя. На чертеже изображена принципиаль ная схема электрогидравлической следящей системы. Система содержит последовательно соединенные задающее устройство 1, ограничитель (регулятор) 2 уровня сигнала, имеющий управляющий вход, первый операционный усилитель 3 с прямым и инверсным входами, электромеханический преобразователь Ц и гидроусилитель 5 с управляющим и распределительным золотниками 6 и 7 соответственно и датчиком обратной свя зи 8 по положению золотника 7 подключенным к инверсному входу усилителя 3. Кроме того, система содержи дополнительный операционный усилитель 9 с прямым и первым и вторым инверсными входами, подключенными соответственно к прямому и инверсно му входам усилителя 3 и к его выходу, а выход усилителя 9 через выпрямитель 10 подключен к управляюще му входу ограничителя 2 уровня сигн ла. При этом первый и второй инверс ные входы усилителя 9 выполнены с отношением коэффициентов усиления, равным в линейном режиме системы ко эффициенту усиления усилителя 3, а прямой и первый инверсный входы с равными по абсолютной величине ко эффициента усиления, ТакИпМ образом, соотношения коэффициентов усиления можно записать в виде: h,dK ,, где К - коэффициент усиления усилителя 3 h h|2 hj- коэффициенты усиления уси лителя 9 по прямому, первом и второму инверсным входам /соответственно, cL- постоянный коэффициент. Электрогидравлическая следящая система работает следующим образом. Сигнал управления, например, син соидальной формы, выработанный зада щим устройством 1, проходит через регулятор 2 уровня и поступает на прямой вход усилителя 3. Усиленный сигнал прикладывается к входу элект ромеханического преобразователя , который приводит в действие управля ющий золотник 6 гидроусилителя 5Датчик обратной связи 8 преобразует .9 перемещение золотника 7 в электрический сигнал, который поступает на инверсный вход усилителя 3, реализуя.тем самым отрицательную обратную связь, необходимую для установления, рабочего режима гидроусилителя 5. Сигналы с входов и выхода усилителя 3 поступают одновременно на входы дополнительного усилителя 9Поскольку коэффициенты усиления по . входам усилителя 9 связаны указанными выше соотношениями, напряжение на его выходе в линейном режиме системы равно нулю. Напряжение на выходе выпрямителя и на управляющем входе ограничителя 2 отсутствует и последний будет сохранять первоначальный коэффициент передачи, равный, например, 1. В случае, если усилитель 3 будет работать в режиме ограничения выходного сигнала, соотношения коэффициентов усиления 1изменятся1 и сигнал поступит на управляющими вход ограничителя 2, коэффициент передачи которого будет уменьшаться до тех пор, пока ограничения сигнала на выходе усилителя 3 не достигнут минимального уровня, который может быть установлен сколь угодно малым. Таким образом, работа усилителя 3 в режиме огранимения выходного сигнала исключается, следовательно, не возникают дестабилизирующие работу и снижающие линейность системы дополнительные гармонические составляющие. Применение изобретения в электрогидравлических приводах вибростендов и в поверхностных источниках сейсмических сигналов вибрационного типа позволяет повысить их устойчивость. Формула изобретения Электрогидравлическая следящая система, содержащая последовательно соединенные задающее устройство, первый операционный усилитель с прямым и инверсным входами, электромеханический преобразователь и гидроусилитель с распределительным золотником и датчиком обратной связи по положению последнего, подключенным к инверсному входу первого операционного усилителя, отличающаяся тем, что, с целью повышения устойчивости, она снабжена ограничителем
уровня сигнала, имеющим управляющий вход, выпрямителем и дополнительным операционным усилителем с прямым и первым и вторым инверсными входами, подключенными соответственно к прямому и инверсному входам и к выходу первого операционного усилителя, причем первый и второй инверсные входы дополнительного операционного усилителя выполнены с отношением коэффициентов усиления по ним, равным в линейном режиме системы коэффициенту усиления первого операционного усилителя, а прямой и первый инверсный входы - с равными по абсолютной величине коэффициентами усиления, при этом задающее-устройство последовательно связано с первым операци онным усилителем через ограничитель уровня сигнала, а управляющий вход последнего подключен через выпрямитель к выходу дополнительного операционного усилителя.
Источники ИКфОр ..ГчИИ,
принятые во внимание при экспертизе
t Авторское свидетельство СССР ff 667/00, кл. F 15 В 3/00, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
| Вибрационный источник сейсмических сигналов | 1986 |
|
SU1543361A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1999 |
|
RU2161579C1 |
| Электрогидравлическая следящая система | 1981 |
|
SU1019119A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2311567C1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ | 2009 |
|
RU2430397C2 |
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 1996 |
|
RU2129305C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
