(54) СЛЕДЯЩАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1979 |
|
SU822148A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU407286A1 |
| Следящая система | 1980 |
|
SU941925A1 |
| Следящая система | 1979 |
|
SU834668A1 |
| Следящая система | 1986 |
|
SU1352451A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| Комбинированная следящая система | 1982 |
|
SU1023276A1 |
| Следящая система | 1986 |
|
SU1411704A1 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ | 2010 |
|
RU2453891C1 |
Изобретение относится к автоматическому регулированию и управлению и может найти применение в тех систе мах автоматического регулирования, где присутствуют нелинейные элемен ты и блоки. Известна следящая система, содержащая последовательно соединенные первый сумматор, первый и второй усилитель, второй сумматор, нелинейный блок, двигатель и редуктор, выхо которого соединен с одним из входов первого сумматора, а выход первог.о усилителя через последовательно соединенные реле и делитель соединен со вторым входом второго сумматора Точность такой системы обеспечивается только в линейной зоне работы нелинейного элемента и резко снижается при сигналах ошибки, выходящих за пределы линейной зоны. . Известна следящая система, содержащая последовательно соединенные . первый сумматор, усилитель, второй сумматор, третий сумматор, нелинейный инерционный блок, четвертый сумматор, двигатель, выход которого соединен с одним входом первого.сумматора, выход которого через последовательно соединенные пятый сумматор, первый и второй дифференциатор подключен ко второму входу второго суьматора, выход первого дифференциатора соединен с третьим входом второго сумматора и через реле - со вторым входом четвёртого сумматора и входом делителя, выход которого соединен со вторым входом третьего сумматора,выход второго сумматора через последовательно соединенные первую и вторую модель соединен со вторым входом пятого .сумматора Недостатком известной системы является неточность воспроизведения входного сигнала вследствие того, что на вход нелинейного блока поступает не .только усиленный сигнал ошибки, но и сигнал с выхода разокнутого кана-
38
ла по задающему воздействию, включаю щего два последовательных дифференцирующих блока, поэтому при быстрых изменениях задающего воздействия на выходе этого канала возникают кратковременные импульсы, большой амплитуды, переводящие нелинейный элемент в режим насыщения. Ошибка комбинированной следящей системы при наличии в замкнутом контуре нелинейного элемента резко возрастает. Это увеличение ошибки объясняется тем, что недокомпенсированная ошибка связью по задающему воздействию становится больше, а замкнутой частью системы уменьшается в меньшее число раз, чем в линейной систем.е. Поэтому накладываются ограничения на выбор условий инвариантности для входного задшощего ваздействия, что сужает облас применения системы для заданной точности слежения. Кроме того, при насыщении нелинейного элемента з еньшается эквивалентный коэффициент усиления, что приводит к затягивают переходных процессов и уменьшению быстродействия всей системы.
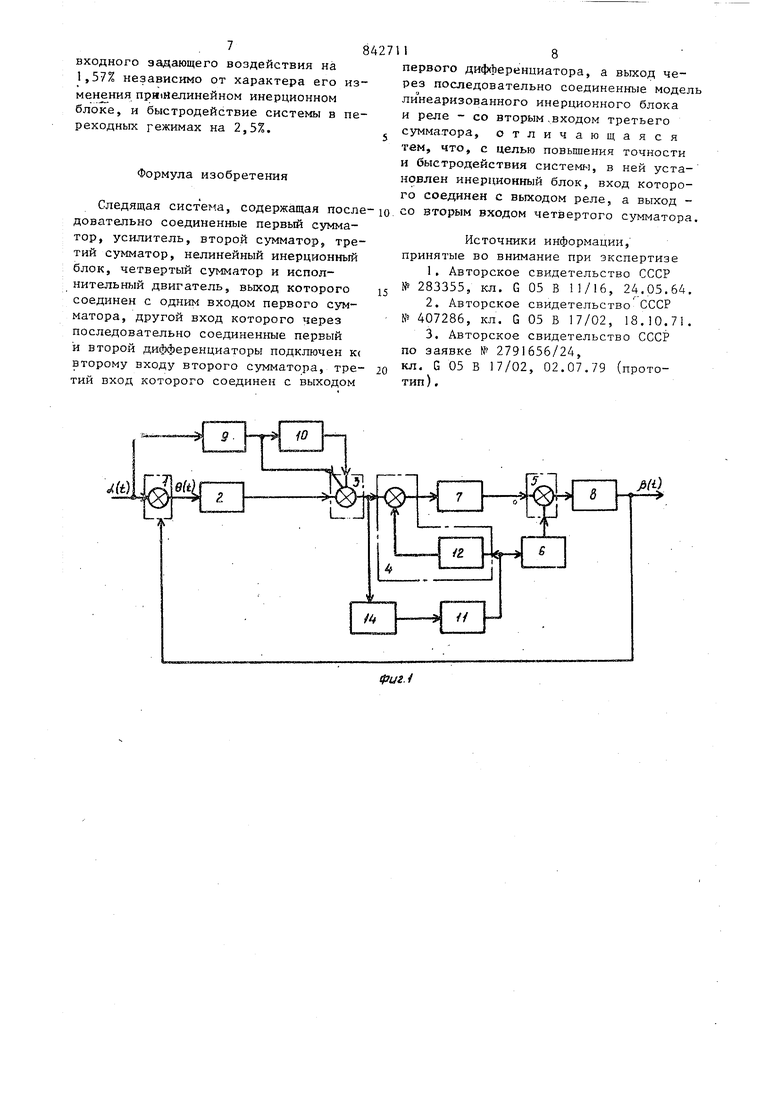
Наиболее близкой по технической сущности к предлагаемому является слдящая система, содержащая последовательно соединенные первый сумматор усилитель, второй сумматор, третий сумматор, нелинейный инерционный бло четвертый сумматор и исполнительный двигатель, выход которого соединен с одним из входов первого сумматора, другой вход которого через последовательно соединенные первый и второй дифференциаторы соединен со вторым входом второго сумматора, третий вход которого соединен с выходом первого дифференциатора, а выход через последовательно соединенные модель линеаризованного инерционного блока и реле - со вторым входом третьего сумматора .
Недостатком известной системы является ее неточность и быстродействие при быстром изменении сигнала задания.
Цель изобретения - повьшхение точности и быстродействия системы.
Поставленная цель достигается тем, что в системе установлен инерционный блок, вход которого соединен с выходом реле, а выход - со вторым входом четвертого сумматора.
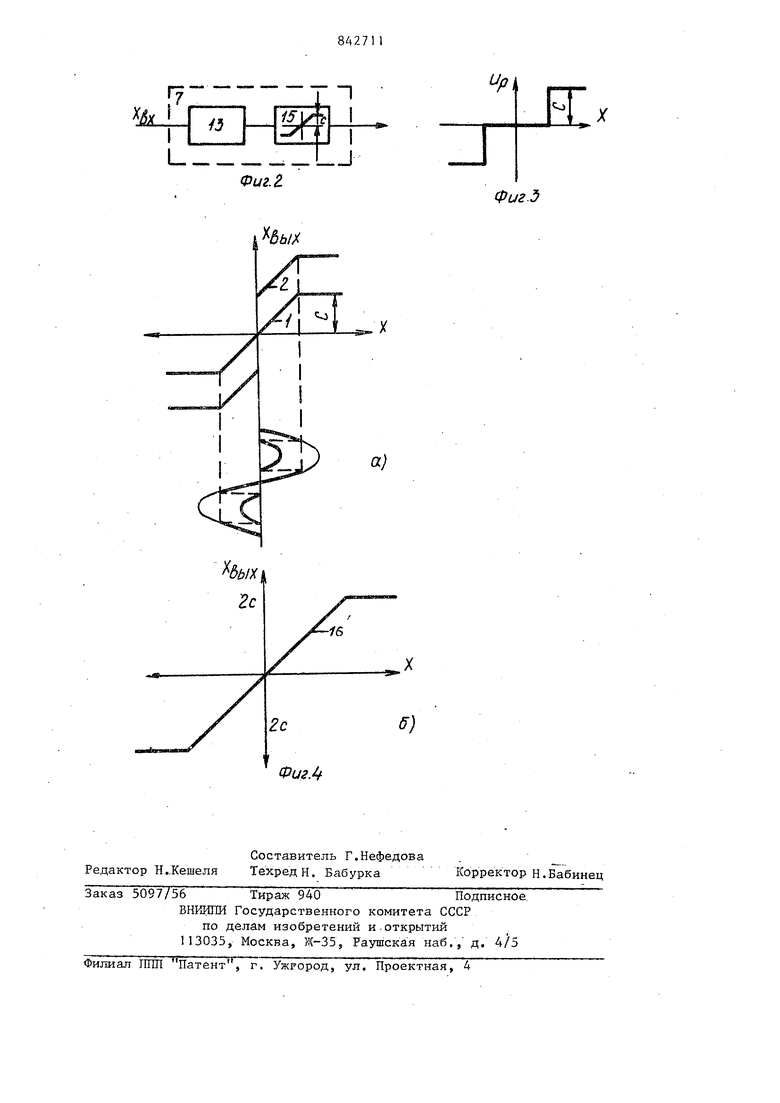
На фиг. 1 представлена блок-схема системь ; на фиг. 2 - блок,-с. нелиней14.
кого инерционного блокад на фиг. 3 характеристика реле; на фиг. А эпй)ры напряжения.
Система содержит, первый сумматор 1, усилитель 2, второй, третий и четвертый сумматоры 3-5, инерционный блок 6, нелинейный инерционный блок 7, исполнительный двигатель 8, первый и второй дифференциаторы 9 и-10, реле 11, делитель 12 напряжения, инерционная чачть 13 нелинейного блока 7 модель линеаризованного инерционного блока 14, безинерционная нелинейность 15 нелинейного блока 7, oC(t),fi (t), 0(t), соответственно, задающее воздействие, выходной аигнал и сигнал .рассогласования.
Работа системы заключается в точном воспроизведении задающего воздействия, которое возможно при равенстве нулю сигнала рассогласований
9(t)oC(t)-B(t)O.Пpи подаче на вход системы (на вход первого сумматора 1) задающего, воздействия o.(t) на выходе системы формируется сигнал, поступающий на другой вход первого сумматора 1, тем самым образуя сигнал рассогласования &. (t) на выходе первого сумматора 1, который усиливается, предварительным усилителем 2 и через сум.маторы 3 и 4 и нелинейный блок 7 с насьшцением подается на вхад исполнительного двигателя 8. Разомкнутый канал управления дифференциатора 9 и
10формирует первую и вторую .производные от задающего воздействия 0(t), обеспечивая повьш1ение порядка астатйзма системы, а следовательно, и точ ности воспроизведения задающего воздествия. Однако эффективность разомкнутого канала резко падает при наличии нелинейного блока 7 с насьЩ ением. Оп1ика системы увеличивается до недопустимых величин. Нелинейный блок 7 можно представить в виде последователного соединения инерционной части 13
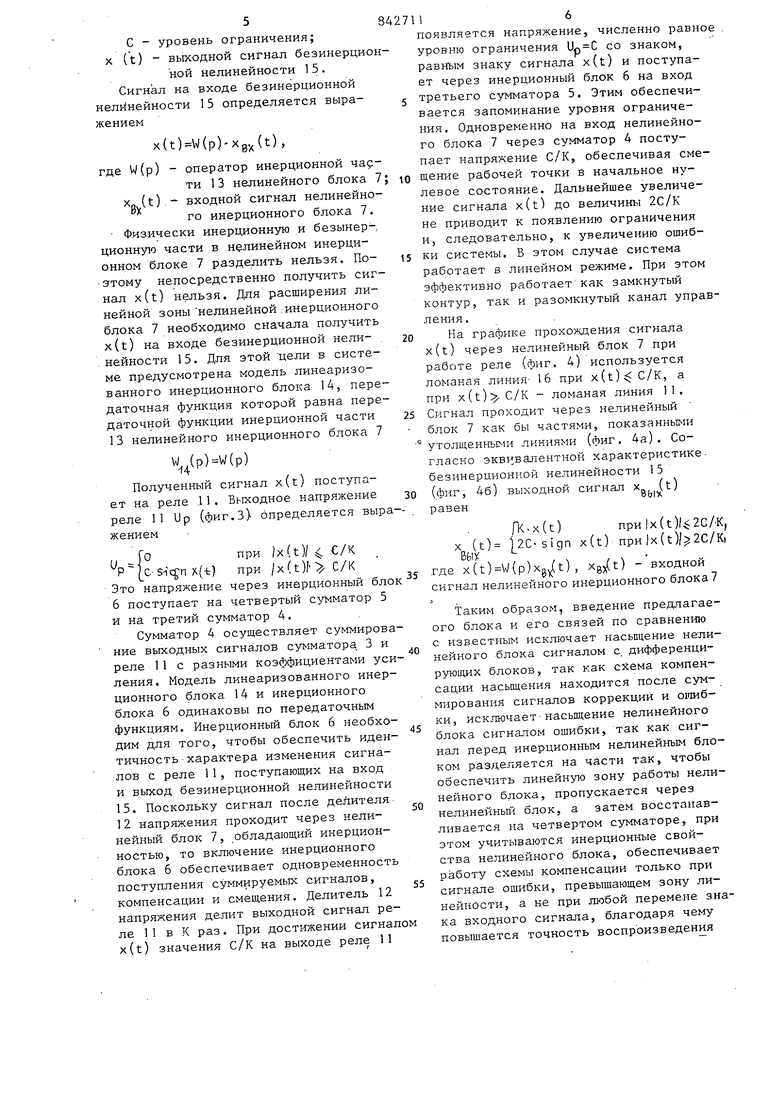
и безинерционной нелинейности 15 (фиг. 2). Зависимость между входом и выходом-безинерционной нелинейности 15 определяется выражением
. Гкх(; ПРИ/x(t)u с/,
LC-si n X(t; ПРИ (X(t;| С//6: ,
где К - коэффициент усиления безинерционной нелинейности 15 на линейном участке; с - уровень ограничения; X (t) - вь1ходной сигнал безинерцио ной нелинейности 15. Сигнал на входе безинерционной нелинейности 15 определяется выражениемx(t)W(p)X0.(t) , где .W(p) - оператор инерционной ча ти 13 нелинейного блока - входной сигнал нелинейно го инерционного блока 7. Физически инерционную и безынер-, ционную части в нелинейном инерционном блоке 7 разделить нельзя. Поэтому непосредственно получить сиг нал x(t) нельзя. Для расширения линейной зоны нелинейной.инерционного блока 7 необходимо сначала получить x(t) на входе безинерционной нелинейности 15. Для этой цели в системе предусмотрена модель линеаризованного инерционного блока 14, пере даточная функция которой равна пере даточной функции инерционной части 13 нелинейного инерционного блока 7 %(p)w(p) Полученный сигнал x(t) поступает на реле .11. Выходное напряжение реле 11 Up (фиг.З) определяется выр жением Опри |x(t)/ 4 С/К Р I С- 51СГП X(-t)при /x(t)|- С/К о4 v „ Это напряжение через инерционный бло 6 поступает на четвертый сумматор 5 и на-- третий сумматор 4. Сумматор 4 осуществляет суммирова ние выходных сигналов сумматора, 3 и реле 11 с разными коэффициентами уси ления. Модель линеаризованного инерционного блока 14 и инерционного блока 6 одинаковы по передаточным функциям. Инерционный блок 6 необходим для того, чтобы обеспечить идентичность характера изменения сигна:Лов с реле 11, поступающих на вход и выход безинерционной нелинейности 15. Поскольку сигнал после деЛителя. 12 напряжения проходит через нелинейный блок 7, .обладающий инерционностью, то включение инерционного блока 6 обеспечивает одновременность поступления суммируемых сигналов, компенсации и смещения. Делитель 12 напряжения делит выходной сигнал реле 1 в К раз. При достижении сигнал x(t) значения С/К на выходе реле 11 116 появляется напряжение, численно равное уровню ограничения со знаком, paBHbiM знаку сигнала x(t) и поступает через инерционный блок 6 на вход третьего сумматора 5. Этим обеспечивается запоминание уровня ограничения. Одновременно на вход нелинейного блока 7 через сумматор 4 поступает напряжение С/К, обеспечивая смещение рабочей точки в начальное нулевое состояние. Дальнейшее увеличение сигнала x(t) до величины 2С/К не приводит к появлению ограничения и, следовательно, к увеличению ошибки системы. В этом случае система работает в линейном режиме. При этом эффективно работает как замкнутый контур, так и разомкнутый канал управления. На графике прохождения сигнала x(t) через нелинейный блок 7 при работе реле (фиг, 4) используется ломаная линия- 16 при x(t)C/K, а при x(t)C/K - ломаная линия 11. Сигнал проходит через нелинейный блок 7 как бы частями, показанными утолщенными линиями (фиг. 4а) . Согласно эквр валентной характеристике, безинерционной нелинейности 15 (фиг, 4б) выходной сигнал х-, (t) равен x(t) npH|x(t)l42G/-K, 2Csign x(t) npH|x(t), X (t) ВЫХ / .., ,N где x(t)W(p)xnJt) , Xni/t) - входной . сигнал нелинейного инерционного блока 7 Таким образом, введение предлагаеого блока и его связей по сравнению с известным исключает насьпцение нелинейного блока сигналом с. дифференцирующих блоков, так как схема компенсации насыщения находится после суммирования сигналов коррекций и ошибки, исключает-насыщение нелинейного блока сигналом ошибки, так как сигнал перед инерционным нелинейным блоком разделяется на части так, чтобы обеспечить линейную зону работы нелинейного блока, пропускается через нелинейный блок, а затем восстанавливается на четвертом сумматоре, при этом учитываются инерционные свойства нелинейного блока, обеспечивает работу схемы компенсации только при сигнале ошибки, превышающем зону линейности, а не при любой перемене знака входного сигнала, благодаря чему повьш1ается точность воспроизведения 7 входного задающего воздействия на 1,57% независимо от характера его изменения пржнелинейном инерционном блоке, и быстродействие системы в переходных режимах на 2,5%. Формула изобретения Следящая система, содержащая после довательно соединенные первый сумматор, усилитель, второй сумматор, третий сумматор, нелинейный инерционный блок, четвертый сзгмматор и исполнительный двигатель, выход которого соединен с одним входом первого сум. матора, другой вход которого через последовательно соединенные первый и второй дифференциаторы подключен к второму входу второго сумматора, третий вход которого соединен с выходом 8 первого диф(Ьеренциатора, а выход через последовательно соединенные модель линеаризованного инерционного блока и реле - со вторым ..входом третьего сумматора, отличающаяся тем, что, с целью повышения точности и быстродействия системм, в ней установлен инерционный блок, вход которого соединен с выходом реле, а выход со вторым входом четвертого сумматора. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 283355, кл. G 05 В 11/16, 24.05.64. 2.Авторское свидетельство СССР № 407286, кл. G 05 В 17/02, 18.10.71. 3. Авторское свидетельство СССР по заявке № 2791656/24, кл. G 05 В 17/02, 02.07.79 (прототип).
5б/Х
ФигЛ
Фиг.5
