4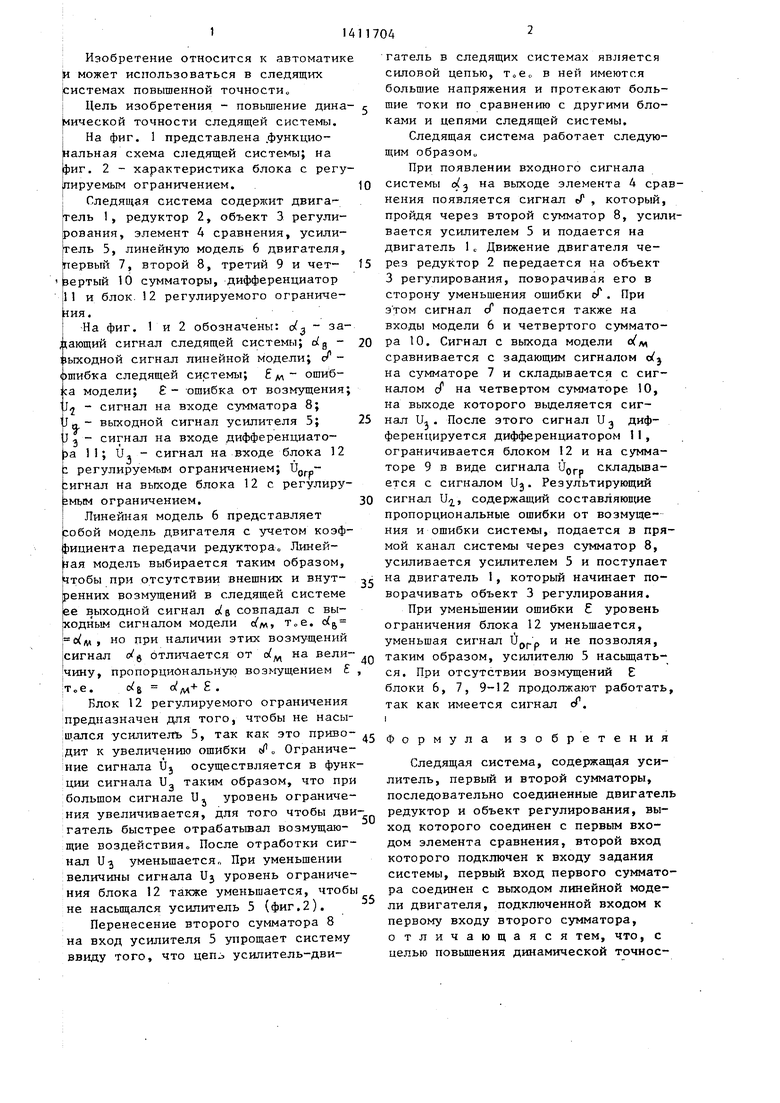
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU407286A1 |
| Комбинированная следящая система с люфтом | 1985 |
|
SU1318989A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU376751A1 |
| Следящая система | 1979 |
|
SU842711A1 |
| Следящая система | 1983 |
|
SU1123019A1 |
| Самонастраивающаяся система регулирования скорости | 1987 |
|
SU1462243A1 |
| Устройство для управления электроприводом | 1984 |
|
SU1187149A1 |
| Следящая система | 1983 |
|
SU1109712A1 |
| Следящая система | 1979 |
|
SU834668A1 |
| Система управления | 1978 |
|
SU697974A1 |

Изобретение относится к автоматике и может использоваться в следящих системах повышенной точности. Целью изобретения является повышение динамической точности следящей системы. Система содержит двигатель 1, редуктор 2, объект регулирования 3, элемент сравнения 4, усилитель 5, линейную модель 6 двигателя, сумматоры 7, 8, 9, 10, дифференциатор 11 и блок регулируемого ограничения 12, В системе компенсируется инерционность электромеханической части следящей системы и предотвращается насыщение усилителя системы. 2 ил„ &
о
Фиг1
Изобретение относится к автоматике И может использоваться в следящих Ьистемах повышенной точности
IЦель изобретения - повьштение дина- ической точности следящей системы.
i На фиг. 1 представлена .функциональная схема следящей системы; на фиг. 2 - характеристика блока с регулируемым ограничением. ; Следящая система содержит двигатель 1, редуктор 2, объект 3 регулирования, элемент 4 сравнения, усилитель 5, линейную модель 6 двигателя, первьпТ( 7, второй 8, третий 9 и чет- зертый 10 сумматоры, дифференциатор
IIи блок. 12 регулируемого ограничения.
На фиг. 1 и 2 обозначены: d- задающий сигнал следящей системы; oJg - пыходной сигнал линейной модели; / - ошибка следящей системы; м ошиб- са модели; - -ощибка от возмущения; J.J - сигнал на входе сумматора 8; iJrt - выходной сигнал усилителя 5; J 2 - сигнал на входе дифференциато- эа 11; и, - сигнал на входе блока 12 г регулируемым ограничением; Ugrp :игнал на выходе блока 12 с регулиру- гмьгм ограничением,
Линейная модель 6 представляет собой модель двигателя с учетом коэффициента передачи редуктора. Линейная модель выбирается таким образом, чтобы при отсутствии внещних и внут- ренних возмущений в следящей системе ее выходной сигнал ofg совпадал с выходным сигналом модели Тое. о(/, но при наличии этих возмущений сигнал отличается от , на вели- чину, пропорциональную возмущением Е ;Т.е. .
Блок 12 регулируемого ограничения предназначен для того, чтобы не насы- :щался усилитель 5, так как это приво- дит к увеличению ошибки f Ограниче- ние сигнала Uj осуществляется в функции сигнала U таким образом, что при больщом сигнале Ua уровень ограничения увеличивается, для того чтобы двигатель быстрее отрабатьшал возмущающие воздействияо После отработки сигнал U-J уменьщается,, При уменьшении величины сигнала Кз уровень ограничения блока 12 также уменьшается, чтобы не насьш ался усилитель 5 (фиг.2).
Перенесение второго сумматора 8 на вход усилителя 5 упрощает систему ввиду того, что цепз усилитель-дви
5
0 5 0
5
0
5
гатель в следящих системах является силовой цепью, т„е„ в ней имеются большие напряжения и протекают большие токи по сравнению с другими блоками и цепями следящей системы.
Следящая система работает следующим образоМо
При появлении входного сигнала системы o|Jj на выходе элемента 4 сравнения появляется сигнал tf , который, пройдя через второй сумматор 8, усиливается усилителем 5 и подается на двигатель 1„ Движение двигателя через редуктор 2 передается на объект 3 регулирования, поворачивая его в сторону уменьшения ошибки i/. При этом сигнал сГ подается также на входы модели 6 и четвертого сумматора 10. Сигнал с выхода модели «X /v, сравнивается с задающим сигналом ofj на сумматоре 7 и складывается с сигналом сГ на четвертом сумматоре 10, на выходе которого вьщеляется сигнал Ui. После этого сигнал U, дифференцируется дифференциатором 11, ограничивается блоком 12 и на сумматоре 9 в виде сигнала складьша- ется с сигналом Uj. Результирующий сигнал и, содержащий составляющие пропорциональные ошибки от возмущения и ощибки системы, подается в прямой канал системы через сумматор 8, усиливается усилителем 5 и поступает на двигатель 1, который начинает поворачивать объект 3 регулирования.
При уменьшении ошибки уровень ограничения блока 12 уменьшается, уменьшая сигнал и не позволяя, таким образом, усилителю 5 насьш;ать- ся. При отсутствии возмущений Е блоки 6, 7, 9-12 продолжают работать,
так как имеется сигнал of.
I
Формула изобретения
Следящая система, содержащая усилитель, первый и второй сумматоры, последовательно соединенные двигатель редуктор и объект регулирования, выход которого соединен с первым входом элемента сравнения, второй вход которого подключен к входу задания системы, первый вход первого сумматора соединен с выходом линейной модели двигателя, подключенной входом к первому входу второго сумматора, отличающаяся тем, что, с целью повышения динамической точное314
ти следящей системы, в нее введены третий и четвертый сумматоры, дифференциатор и блок регулируемого ограничения, причем выход элемента сравнения соединен с первым входом второго сумматора, подключенного, выходом через усилитель к входу двигателя, а вторым входом - к выходу третьего сумматора, первый вход которого подключен к выходу блока регулируемого ограничения, информационный вход I
117044
торого соединен с выходом дифференциатора, подключенного входом к второму входу третьего сумматора, входом управления уровнем ограничения блока регулируемого ограничения и с выходом четвертого сумматора, первый вход которого соединен с выходом первого сумматора, второй вход которого
JQ соединен с вторым входом элемента сравнения, подключенного выходом к второму входу четвертого сумматора.
i U02P
«i
uj
ui
VLLZ.Z
| Следящая система | 1980 |
|
SU1115013A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Следящая система | 1983 |
|
SU1109712A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
