Изобретение относится к высокоточным системам автоматического управления и может найти применение при yn-J равлении летательными аппаратами, кораблями и технологическими процессами в химической промышленности.
Известна комбинированная следящая система, содержащая последовательно . соединенные измеритель рассогласования, последовательное корректирующее устройство, сумматор, усилитель мощности, исполнительный двигатель, редуктор и блок основной отрицательной обратной связи, выход которого соединен с одним из входов измерителя рассогласования, другой вход которого через масштабирующий блок и дифференциатор подключен к входам сумматора, причем усилитель мощности и исполнительный двигатель, может быть охвачен местной скоростной рбр-атной связью| 1
Известна комбинированная следящая система, содержащая последовательно соединенные измеритель рассогласования, усилитель, первый сумматор, усилитель мощности, исполнительный двигатель,, редуктор и блок основной отрицательной обратной связи, выход которого соединен с одним из входов измерителя рассогласования, другой вход которого через дифференциатор подключен к входу второго дифференциатора и первому входу второго сумматора, подключенного вторым входом к выходу электронного усилителя, а выходом - к входу электронного усилителя и перво.му входу третьего сумматора, подключенного вторым входом к выходу второго дифференциатора, а выходом - к второму входу первого суммйтора, выход исполнительного двигателя через блок скоростной обратной связи подключен к третьему входу сумматора 2 .
Недостатком известных систем является их невысокая точность, обусловленная наличием люфтов в механических редукторах.
Наиболее близкой к предлагаемой по технической сущности является комбинированная следящаяг система, содержащая последовательно соединенные измеритель рассогласования, первый усилитель, первый сумматор, второй нелинейный усилитель, второй сумматор, усилитель мощности, исполнительный двигатель, редуктор и блок основной отрицательной обратной связи, выход которого соединен с одним из входов измерителя рассогласования, другой
входкоторого через первый дифференциатор подключен к второму входу первого сумматора, входу второго дифференциатора и входу третьего усилителя выход которого через релейный элемент соединен с третьим входом второго сумматора и входом источника питания подключенного к второму входу второго сумматора, вход второго дифференциа- . тора соединен с четвертым входом первого сумматора, пятый выход которого через блок местной скоростной обратной связи соединен с выходом исполнительного двигателя С 31
Недостаток этой системы - ее невысокая точность, обусловленная влиянием люфта, присущего реальной следящей системе с редуктором.
Цель изобретения - повышение точности следящей системы путем компенсации ошибки, вносимой люфтом редуктора в динамическом режиме.
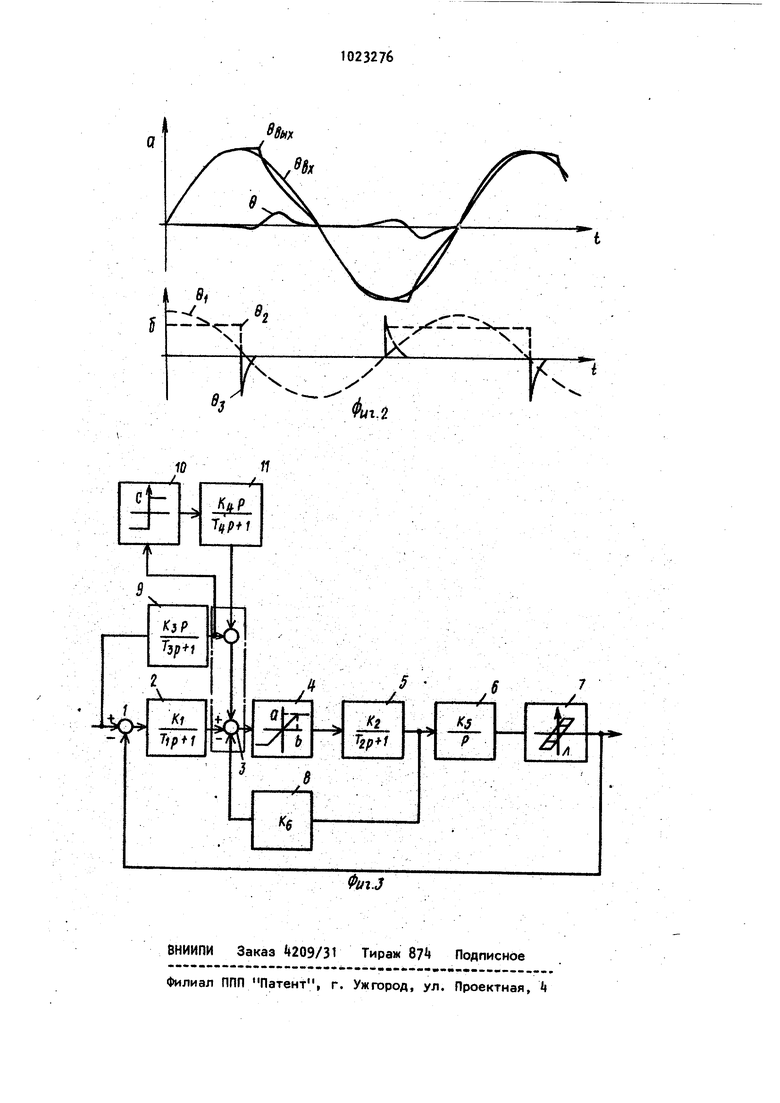
Поставленная цель достигается тем, что в комбинированной следящей системе, содержащей последовательно соединенные измеритель рассогласования, первый усилитель, сумматор второй усилитель, исполнительный двигатель, редуктор и блок основной отрицательной обратной связи, выход которого соединен с одним из входов измерителя рассогласования, другой вход которого через первый дифференциатор подключен к входу релейного блока и к второму входу сумматора, третий вход которого подключен к выходу второго дифференциатора, а четвертый вход через блок местной скоростной обратной связи -соединен с выходом исполнительного двигателя, вход второго дифференциатора подключен к выходу релейного блока.
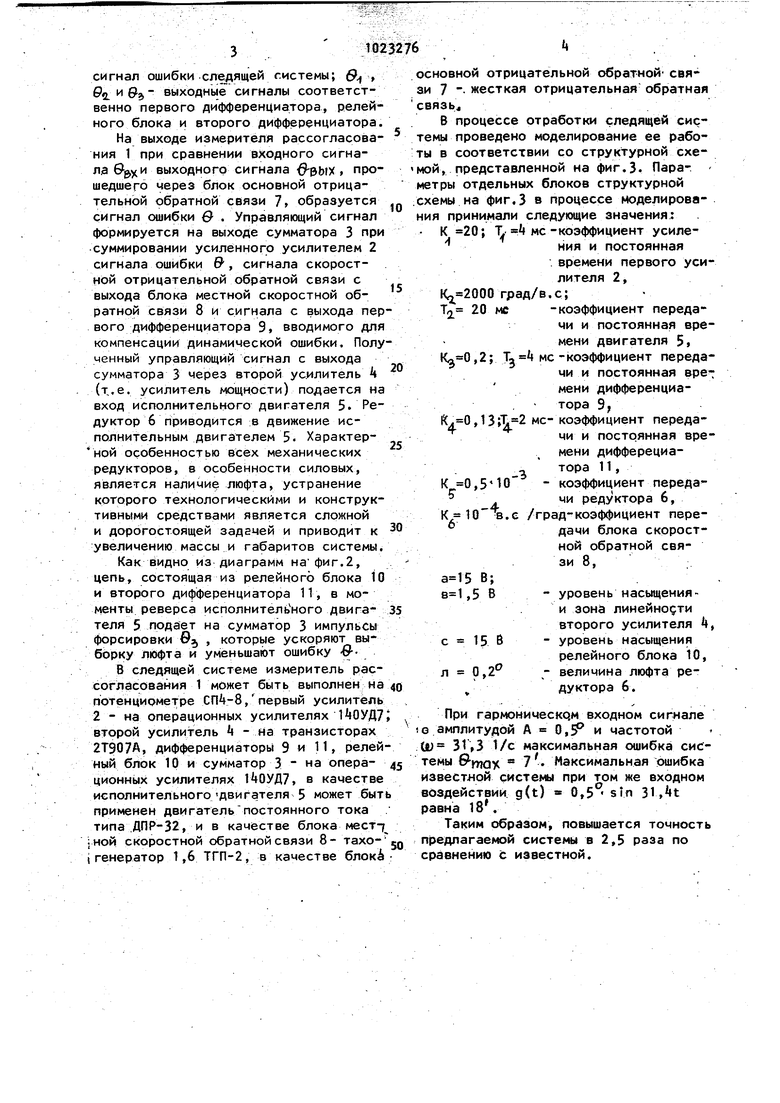
На фиг.1 представлена функциональная схема следящей системы; на фиг.2 временные диаграммы, поясняющие принцип работы следящей системы; на фиг.З структурная схема конкретного выполнения следящей системы.
Устройство содержит измеритель рассогласования 1, первый усилитель 2 . сумматор 3, второй усилитель k, исполнительный двигатель 5, редуктор 6, блок основной отрицательной обратной связи 7, блок местной скоростной обратной связи 8, первый дифференциатор 9, релейный блок 10, второй дифференциатор 11. На фиг.2 приняты следующие
обозначения:-© и-9gbiX входной и выходной сигналы следящей системы; &сигнал ошибки следящей системы; & , 02. и выходные сигналы соответственно первого дифференциатора, релейного блока и второго дифференциатора. На выходе измерителя рассогласования 1 при сравнении входного сигнала &у)(И выходного сигнала рых, прО шедшего через блок основной отрицательной обратной связи 7, образуется сигнал ошибки О . Управляющий сигнал формируется на выходе сумматора 3 при суммировании усиленного усилителем 2 сигнала ошибки & , сигнала скоростной отрицательной обратной связи с выхода блока местной скоростной обратной связи 8 и сигнала с выхода пер вого дифференциатора 9. вводимого для компенсации динамической ошибки. Полу ченный управляющий сигнал с выхода сумматора 3 через второй усилитель k - (т.е. усилитель мощности) подается на вход исполнительного двигателя 5. Редуктор 6 приводится в движение исполнительным двигателем 5. Характерной особенностью всех механических редукторов, в особенности силовых, является наличие люфта, устранение которого технологическими и конструктивными средствами является сложной и дорогостоящей задачей и приводит к увеличению массы и габаритов системы. Как видно из диаграмм нафиг.2, цепь, состоящая из релейного блока 10 и второго дифференциатора 11, в моменты реверса исполнитель ного двигателя 5 подает на сумматор 3 импульсы форсировки © , которые ускоряют выборку люфта и уменьшают ошибку в-В следящей системе измеритель рассогласования 1 может быть выполнен на потенцирметре СП4-8,первый усилитель 2 - на операционных усилителях ЙОУД7 второй усилитель - на транзисторах 2Т907А, дифференциаторы 9 и 11, релей ный блок 10 и сумматор 3 на операционных усилителях 140УД7, в качестве исполнительногодвигателя 5 может быт применен двигательпостоянного тока типа .ДПР-32, и в качестве блока мест-f ;ной скоростной обратной связи 8- тахо(генератор 1,6 ТГП-2, в качестве блок овной отрицательной обратной свя7 жесткая отрицательная обратная зь« В процессе отработки следящей сисы проведено моделирование ее рабов соответствии со структурной схе, представленной на фиг.З. Пара- ры отдельных блоков структурной мы на фиг.З в процессе моделировапринимали следующие значения: К 20; Ъ «if мс-коэффициент усиления и постоянная . времени первого усилителя 2, град/в.с; Т2 20 мс -коэффициент передачи и постоянная времени двигателя 5, ,2; Т5 мс -коэффициент передачи и постоянная времени дифференциа тора 9, К ,0,13 мс- коэффициент передачи и постоянная времени дифферециатора 11, К 0,5МО - коэффициент передачи редуктора 6, к ,с /град-коэффициент передачи блока скоростной обратной связи 8, В; ,5 В уровень насыщенияи зонз линейности второго усилителя , с 15 В уровень насыщения релейного блока 10, л 0,2 величина люфта редуктора 6. При rapMOHM4ecKQM входном сигхале мплитудой А 0, и частотой 31,3 1/с максимальная ошибка сисМаксимальная ошибка естяои системз при том же входном действий g(t) Qt5° sin 31,t на 18. Таким образом, повышается точность длагаемой системы в 2,5 раза по внению с известной.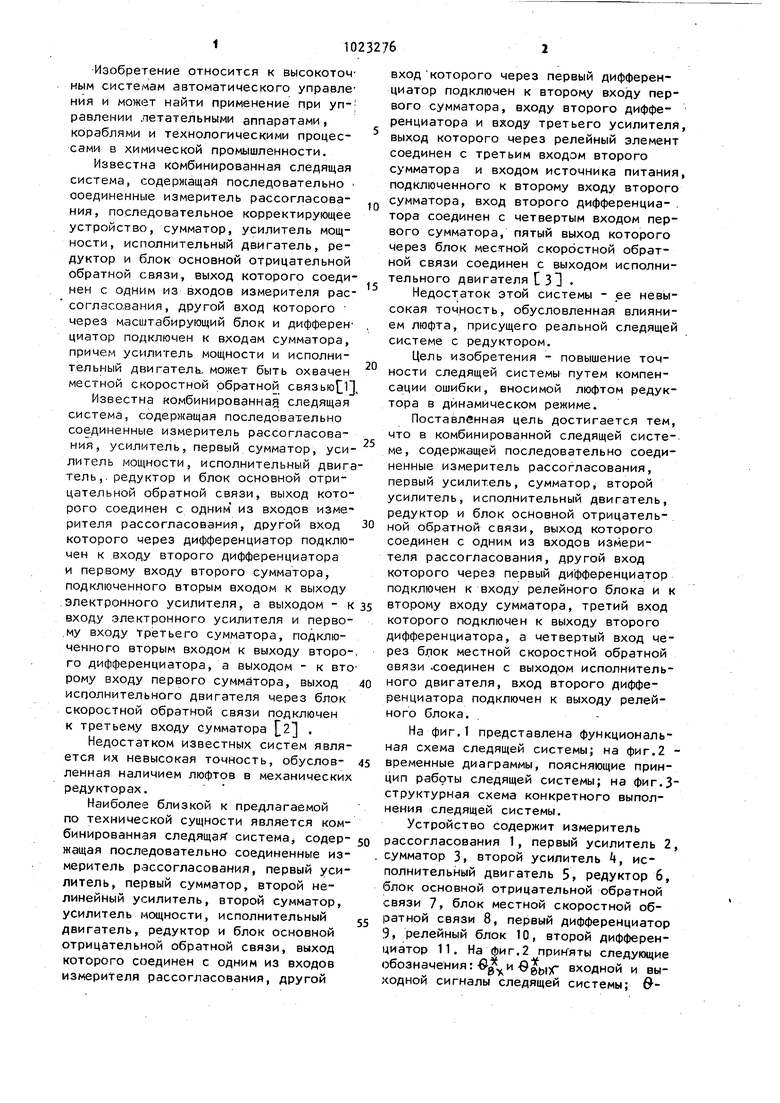
| название | год | авторы | номер документа |
|---|---|---|---|
| Комбинированная следящая система с люфтом | 1985 |
|
SU1318989A1 |
| Комбинированная следящая система с люфтом | 1987 |
|
SU1571546A2 |
| Следящая система | 1975 |
|
SU742871A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2143719C1 |
| Следящая система | 1980 |
|
SU885970A1 |
| Следящая система | 1978 |
|
SU746405A1 |
| Следящая система | 1977 |
|
SU732807A1 |
| Следящая система | 1981 |
|
SU968783A2 |
J
п
10
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Петров Б.Н | |||
| Современные методы проектирования систем автоматического регулирования | |||
| М., Машиностроение, 1967 | |||
| Солесос | 1922 |
|
SU29A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Машгиз, 1963, с.3 7-351 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
