(34)УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ. ДВИЖЕНИЕМ ПЛАВУЧЕГО СЕЙСМОРАЗВЕДОЧНОГО КОМПЛЕКСА
значения управляющих воздействий -у., Эти .управления реализуются на регуляторе УО. Информация о текущем значении переменных состояния .Х в виде наблюдаемьк на выходе датчика переменных сос.ояния УО значений Z поступает в блок оптимальной фильтрации. Поиск оптимальных управлений Ч . в этом устройстве осуществляется неоднократным интегрированием уравнений свободного движения на прогнозирующей модели при фиксированном положении управляющего органа изаданных в начале цикла расчета значениях X{i(j). Прогнозирование движения УО на отрезок времени прогноза Т осуществляется за время t , в течение которого величина управляющего воздействия V остается неизменной tS. Однако применение такого устройства2о рой для управления движением сейсморазведочного комплекса невозможно, так прогнозирование поведения сложного объекта с распределенными параметрами, каким является сейсморазведочный к.ойплёкс(СРК).даже на достаточно упрощенной модели,требует довольно значительного времени, что делает предположение о малости At неприемлемым, так как оптимальное на начальный момент i) управление может оказаться для реального времени {5+ Д-Ь , .с которого оно начинает реализоваться на УО, далеко не лучшим . . , Цель изобретения - повышение точности устройства. Поставленная цель до.стигается тем, что в устройство введены экстра полятора состояния судна, вариатор управляющих воздействий, логический блок, причем датчик заданной траектории и да-учик ограничений на переменные состояния судна соединены со входами экстраполятора состояний судна, на другие входы которого подк чены выход блока оптимальной фильтрации, выход датчика скорости движения комплекса и выход датчика навигационных препятствий, выход зкст раполятора состояний судна соединен со вторым входом оптимизатора управляющих воздействий, к третьему входу которого подключен вариатор управляю щих воздействий, первый выход оптими затора управляющих воздействий соединен с первым входом логического бл ка, ко второму входу которого подключен выход блока оптимальной фильтрации, выход логического блока подключеу ко входам блока настройки модели, блока оптимальной фильтрации, исполнительного элемента с управляемым объектом,
А также для повышения качеств управления устройство содержит .датчик положения сейСмографной косы, вычислитель средних значений и зкстраполятор положения сейсморазведочного комплекса, на входы которого подключены выходы датчиков положения сейсмографной косы, навигационных препятствий, скорости движения комплекса,
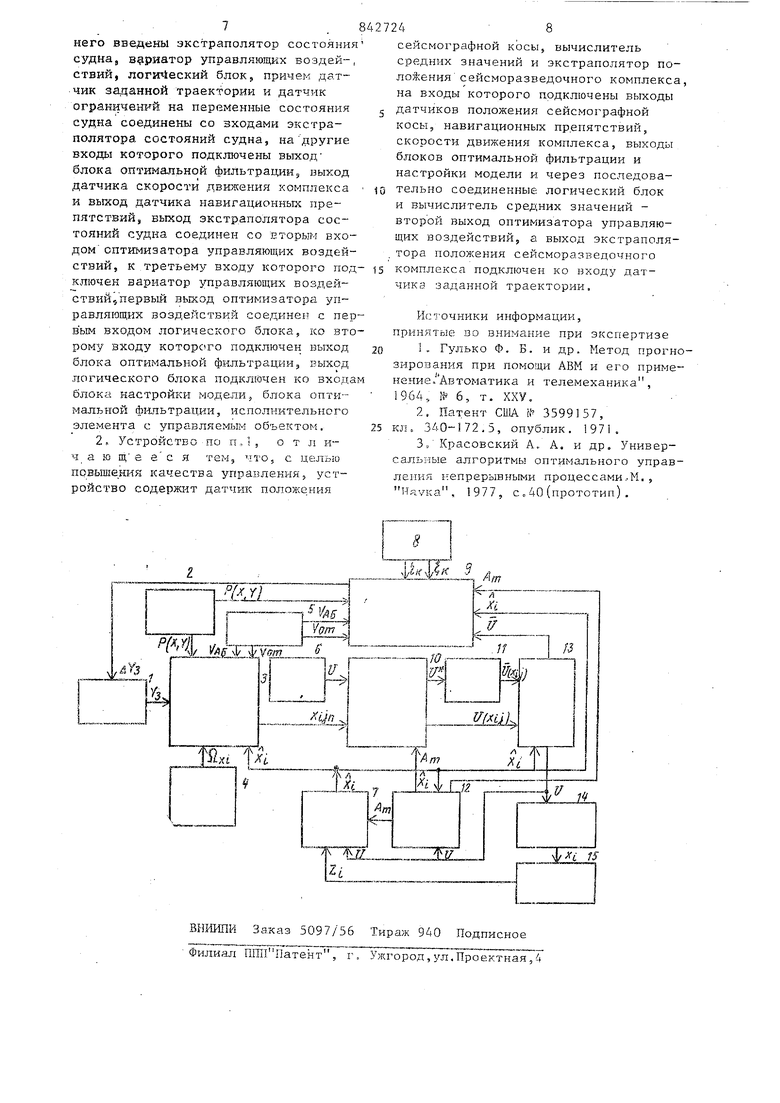
выходы блоков оптимальной фильтрации и настройки модели и через последовательно соединенные логический блок и вычислитель средних значений - втовыход оптимизатора управляющих воздействий, а выход, экстраполятора положения сейсморазведочного комплек- „, са подключен ко входу датчика заданной траектории. На чертеже представлена блоксхема устройства для управления движением подвижного сейсморазведочного комплекса. Устройство включает датчик 1 заданной траектории, датчик 2 навигационных препятствий, экстраполятор 3 состояния судна датчик 4 ограничений на переменные состояния судна, датчик 5 скорости движения комплекса, вариатор 6 управляющих воздействий, блок 7. оптимальной фильтрации, датчик 8 .. положения сейсмографной косы, зкстраполятор 9 положений сейсморазведочного комплекса, оптим 1затор 10 управляющих воздействий, вычислитель 1 1 сред шх значений 1 12 настройки модели, логический блок 13,исполнительный элемент 14 с управляемым объектом, датчик 15 переменных состояний суд- на. Предлагаемое устройство работает следующим образом. В процессе движения СРК происходит изменение углов курса Ц и дрейфа Х/г. судна, углЪвой скорости рыскания Х, положения центратяжести судна в неподвижной относительно Земли системе координат Х и Xgменяются и углы перекладки руля Х,. Эти переменные л 1,2,,,.,6) измеряются датчиком 15 переменных состояния судна и в смеси с шумами измерения в виде переменных 2 поступают в блок 7 оптимальной . . фильтрации измеренных величин. Здесь на основании .информации об изменении параметров самонастраивающейся модели А.„,(1гг 1,2..,) , поступившими из блока 12 настройки модели с учетом динамики УО и действующих на нег управляющих сигналов V , определяют- ся неивероягнейшие значения Х-| в виде оптимальных оценок х-; . Эти оценки переменных состояния судна, поступают в. канале каждого цикла расчета,в блок 12 настройки модели, в логический блок .13, а также в оба экстраполятора. В блоке настройки модели, на,основании рассогласования переменных состояния модели ы и реального процесса постоянно проис ходит уточнение параметров соответствии с изменением динамических характеристик УО. В начале цикла расчета датчик 1 заданной траектории выдает в экстраполятор состояний судна 3 участок траектории, по которой должно пройти судно время от начального момента -to до момента Ц-t о i +ТпрСТцр ЛЬ в виде функции времени f, (-t) Туда же в начале цикла поступает информация о значениях скоростей движения судна на текущий момент irQ от датчика 5, а также сведения Р(х, о находящихся на пути следования комплекса навигационных препятствий от .датчика 2.навигационных препятствий. С выхода датчика 4 в экстраполятор 3 постоянно поступают также значения ограничений Х крле бания углов курса и дрейфа судна и его угловой скорости, а также на углы перекладки руля. Эти ограничения, вызванные необх.одимостью обесп чения нормального функционирования закрепленных на СГК приемников первичной геолого-геофизической информации, задаются в зависимости or программы плавания. Используя поступившую в начале цикла информацию, экстраполятор состояний суднаопре- деляет с учетом программы плавания и соответствующего данной программе вида критериальной функции, мас.сивы, физически возможные и незапрещенные наложенными ограничениями. Далее эти массивы поступают в оптими-55
затор 10 управляющих воздействий, где на настраиваемой модели 01цени- ваются для каждого набора значений Х
управляющих воздействий, отличающееся тем, что., с целью повьшения точности устройства, в 46 различные варианты управлений, вырабатываемых вариатором 6, по миниму му критерия качества. В оптимизаторе 10 итеративно формируется управление V (, а в вычислителе П определяется таким путем последовательных усреднений массив средних значений управляющих воздействий V(.j) , ко- . торые поступают в логический блок 13. В момент времени Ь +д-Ь- где время вычисления в логическом блоке 13, из блока оптимальной фильтрации поступаег информация о состоянии УО на это время в виде оценки ) ,. . Логический блок I3 находит из массивов те два значения V иХ/, которые соответствуют текущему состоянию судна. Управление; V в течение очередного цикла расчета длительностью в ut реализуется на УО, а среднее значение V поступает в экстраполятор положений сейсморазведочного комплекса. Тцда же поступают уточненные значения коэффициентов А у,,, оценка состояния )- УО на момент tдН-Лtj координаты каждой точки СГК. По резул,ьтатам прогнозирования экстраполятор 9 оценивает близость прохождения СРК по отношению к указанным датчикам 2 навигационных препятствий и, в случае необходимости. вьщаеТ в Датчик 1 Сигнал Л ч1 -j корректирующий первоначально заданную траекторию.. - . . Описанный вьшге порядок работы уст-. ройства повторяется далее с цикличностью Vai.- , Формула изобретения 1 . Устройство для управле-ния движением плавучего сейсморазведочного комплекса, содержащее датчики заданной траектории, переменных состояний судна, ограничений на переменные сое-, тояния судна, скорости-движения комплекса навигационных препятствий и блок настройки модели, первый выход которого связан со входом блока бптимальной фильтрации, выход которого ооединен сО входом блока настройки модели, второй выход которого подключей к первому входу оптимизатора
него введены экстраполятор состояния судна, вариатор управляющих воздей-, ствий, лог1Р4аский блок, причем датчик заданной траектории и датчик ограничений на переменные состояния судна соединены со входами экстраполятора состояний судна, на другие входы которого подключены вьпсод блока оптимальной фильтрации, выход датчика скорости движения комплекса и выход датчика навигационных препятствий, выход экстраполятора состояний судна соединен со вторым входом оптимизатора управляющих воздействий, к.третьему входу которого подключей вариатор управляющих воздействий первый выход оптимизатора управляющих воздействий соединен с первым входом логического блока, ко второму входу которого подключен выход блока оптимальной фильтрации, выход логического блока подключен ко входам блока настройки модели, блока оптимальной фильтрации, исполнительного элемента с -управляемым объектом.
2, Устройство по п,1, отличаю ще ес я тем, что, с целью повышения качества управления, устройство содержит датчик положе.ния
сейсмографной косы, вычислитель средних значений и экстраполятор полоЛения сейсморазведочного комплекса на входы которого подключены выходы датчиков положения сейсмографной косы, навигационных препятствий, скорости движения комплекса, выходы блоков оптимальной фильтрации и настройки модели и через последовательно соединенные логический блок и вычислитель средних значений второй выход оптимизатора управляющих воздействий, а выход экстраполя, тора положения сейсморазведочного комплекса подключен ко входу датчика заданной траектории.
Источники информации, принятые во внимание при экспертизе
1.Гулько Ф, Б. и др. Метод прогнзирования при помощи АВМ и его применение.Автоматика и телемеханика, 1964, № 6, т. XXV.
2.Патент США № 3599157, кл. 340-172.5, опублик. 1971.
3.Красовский А. А. и др. Универсальные алгоритмы оптимального управления непрерывными процессами..М., Наука, 1977, с.40(прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления движением судна | 1978 |
|
SU717730A1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2012 |
|
RU2489731C1 |
| Устройство для автоматического регулирования технологического параметра,преимущественно влажности бумажного полотна | 1986 |
|
SU1416582A1 |
| СПОСОБ КООРДИНИРОВАННОГО МАНЕВРИРОВАНИЯ СУДНА | 2010 |
|
RU2429161C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2021 |
|
RU2759068C1 |
| ОПЫТОВЫЙ МОРСКОЙ МОДУЛЬНЫЙ КОМПЛЕКС | 2021 |
|
RU2760823C1 |
| Система оптимального управления объектами второго порядка | 1976 |
|
SU648946A1 |
| Система прогнозирования безопасного расхождения судов | 2022 |
|
RU2780081C1 |
