. I .
Изобретение относится к устройствам точного управления движением научноисследовательских судов на шельфе и в Мировом океане для проведения специальных геолого-геофизических работ и, главным образом, при управлении судами когда необходимо обеспечивать маневрирование курсом, так и скоростью в соответствии с заданной программой геолого-геофизических работ, т.е. обеспечивать точное маневрирование судна по заданной траектории с заданной скоростью, когда проявляются существенные нелинейные свойства судна как управл5а емого объекта, в частности при движении иа малых скоростях хода судНа, когда снижается эффективность действия руля Н ухудшается управляемость судна.
Основным критерием качества функционирования таких систем является достижение необходимой точности движений по заданной траектории с заданной скоростью, обусловленной спецификой геологонлеофизических работ.
Известно устройство для стабилизаци судна на гиперболической тpaeктopииj являющейся геометрическим местом точек, имеющих одинаковую разность фаз между колебаниями двух синфазных передатчиков фазовой радионавигационной системы, содержащее приемник фазовой радщ навигационной системы (датчик разности фаз), датчик курса, блок управления рулевой машиной l .
Недостатком данного устройства являетсй невозможность управления судном по какой-либо траектории, отличной от гиперболической траектории и невозможность автоматического управления скоростью движения.
Известны также устройства, обеспечивающие движение объектов по заданной траектории, в которых используется принцип управления с моделью объекта в контуре утфавления 2j .
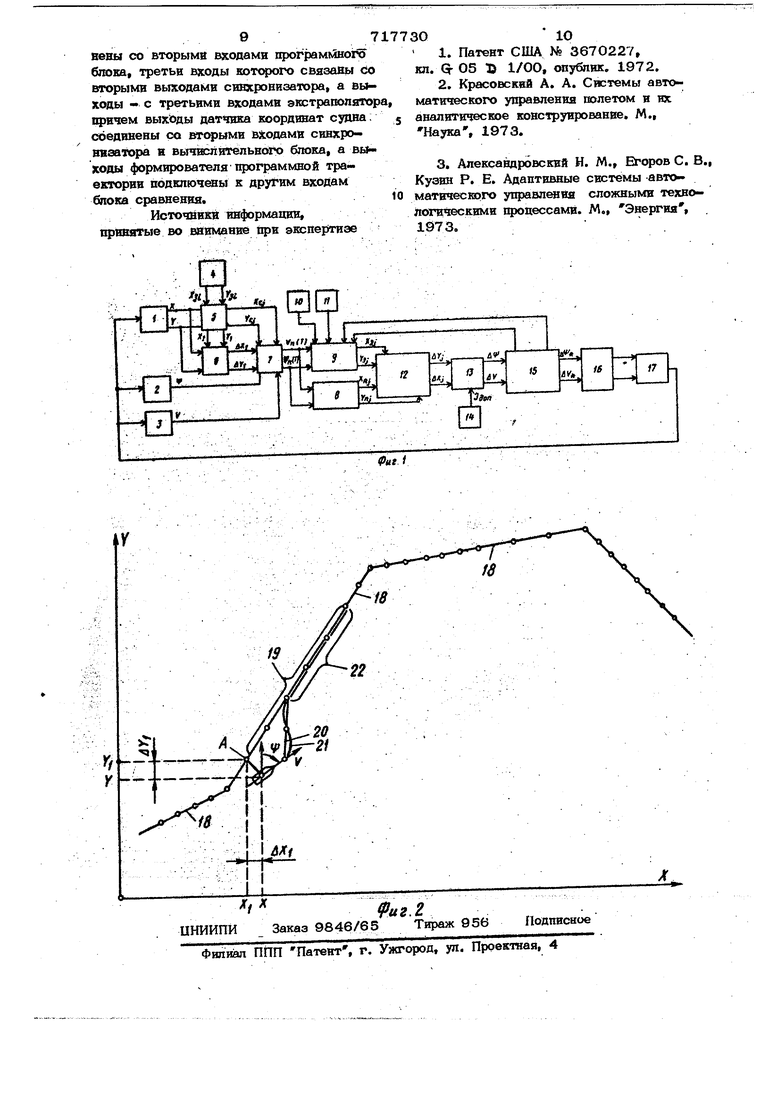
Эти устройства предназначены для рещения задач стабилизации курса и траектории, но не обеспечивают управления по траектории, когда необходимо не только обеспечивать минимальное отклонение от заданной линии, но и осуществлять автоматическое управление скоростью в режиме маневрирования по про)рамме. Наиболее близкими по технической сущности к предлагаемой являются сие- темы управления с прогнозирующими подстраиваемыми; моделями, работающие по принципу упреждающей коррекции. Такие автоматические системы управления имеют следующую обобщенную структуру. Система датчиков, характеризующая состояния управляемого объекта, подключена к экстраполятору динамических характеристик объекта, к другим входам которог подключены задатчик начальных условий и датчик внещних возмущений, а выход эвстраполятора подключен либо к блоку сравнения, к другому входу которой подключен датчик заданных характеристик процесса управления, либо непосредственн к вычислителю критерия качества, последовательно соединенного с оптимизатором и коммутатором, один из двух выходов которого подключен к экстра.полятору, чем организована обратная связь для поиска оптимальных управляющих воздействий, дру1Х)й к исполнительному устройству управляемого объекта з7 . Применение таких систем весьма эфктивно для управления сложными пролессами, когда рещение задачи оптимального управления классическими методами затруднено (существенно нелинейные объё -тЫв неквадратичные качества , и пр.), что. как раз имеет место при управлении судном по траектории в режиме маневрирования курсом и скоростью по заданной программе геолого-геофизически работ. Однако указанные системы не мо гут быть применены для точного управле ния судном в режиме маневрирования по заданной траектории с заданной скорость поскольку в известных системах осущест вляется либо непосредственное сравнение экстраполируемых характеристик управляемого процесса с заданными желаемыми характеристиками, либо критерий качеств вычисляется как функция управл5зпощих воздействий в результате экстраполяции процесса управления, что не позволяет в задаче управления судном при маневрировании курсом и скоростью по заданной сложной траектории обеспечить сходимость и устойчивость управления, т.е. не позволяет обеспечить принципиальное реение задачи, так как для щюцесса о1Р тимизации при таком построении системы невозможно задать ни начальных условий ни определить направления поиска оптимального угфавленияо Кроме того, в таких системах не предусмотрена возможность вхождения в заданную траекторию в любой точке маршрута, возможность прерывания и возобновления процесса управления при необходимости рещения других задач маневрирования, не предусмотренных программой геолого-геофизических работ, а также обеспечивать работоспособность системы при возможных сбоях входной информации. Целью изобретения является повышение точности и надежности системы, а именно, создание системь точного управления движением судна при маневрировании по заданной траектории с заданной скоростью и обеспечение при этом возможности вхожден1ая в заданную траекторию в любой точке маршрута, прерывания и возобновления процесса управления при необходимости рещения других задач маневрирования, а также обеспечение работо-. способности системы при возможных сбоях в канале информации о местоположении судна. Поставленная цель достигается тем, что система содержит последовательно соединенные первый блок памяти, синхронизатор, вычислительный блок, программный блок и формщзователь программной траектории, а также второй блок памяти, выход которого подключен к другому входу оптимизатора, .выходы датчиков курса и скорости соединены со вторыми входами программного блсжа, третьи входы которого связаны со вторы ми выходами синхронизатора, а выходы с третьими входами экстраполятора, причем выходы датчика координат судна соединены со вторыми входами синхронизатора и вычислительного блока, а выходы формирователя программной траектории подключены к другим входам блока сравнения. На фиг, 1 представлена функциональная схема системы; на фиг. 2 - геометрическая интерпретация процесса управления судном по заданной траектории. Система (см, фиг. 1) включает дат чик 1 координат ( . , ) судна в прямоугчэльной системе координат ( Y-OY ), неподвижной относительно земли, датчик 2 курса f судна, датчик 3 скорости V судна, первый блок памяти 4, хранящий массда коо1ряшшт (Х , t{ ) j 1, 2t ..,Г заданной тр аектории. Выходы Х и блока памяти 4 соединены со входами сйнхрйниэатора 5, к другим входам которого, а также ко входам вычислительного блока 6 пбд оуЬчены выходы X и датчика 1 координат Местоположейия судна. Выходы У. и Vi синхронизатора 5, характеризующие координаты ближайшей тоЧкй ва заданной траекторки, соединены с программным блоком 7, к другим входам которого подключены выходы датчика 2 курса 4 судна, датчика 3 скорости V судна, а также выходы Vcj и %C;j синхронизатора 5, характеризующие, массив синхронизированных координат заданной траектории. Выходы Уи (Т) и (Т) щюг раммного блока 7 соединены с ф6рм1фо- вателем 8 программной траектории и с экстраполятором 9, к другим двум входам которого подключены задатчйк 10 начальных условий и датчик 11 внещних возмущений. Выход экстра пол ятора 8 И ВЫХОД Хп1 формирователя 8, а также выход акстраполятора 9 и выход п формирователя 8 подключены к блок сравнения 12. Выходы &х| и блока сравнения 12 подключены к оптимизатору 13, к другому входу которого подключен выход дог,, второго блока памяти 14, Выходы i Л, Ч . и выход V оптимизатора 13 подключены к коммутатору .15, Пер- вые выходы коммутатора 15 подключены к экстраполятору 9, вторые выходы k% и V коммутатора 15 подключены к в;пш нительному блоку 16 судна 17. Система работает следующим образом. При управлении судном в режиме маневри рования по заданной траектории с заданной скоростью на каждом шагу решения задачи управления с помощью датчика 1 определяютс;я координаты X , место- положения судна в прямоугольной системе координат ( XOV ), неподвижной относительно земли и связанной с траектор ей движения. Кроме того, с помощью датчика 2 курса и датчика 3 скорости, опре|Деляются текущие значения курса Ч и скорости V . Значения координат X , с датчика 1 вводятся в синхронизатор S, на другие входы которого из блока памяти 4 подается массив координат Ха Nj; (i 1. 2 ... И ) заданной траектории (см. фиг. 2). Причем кофдипаты этого массива задаются для определенных равных между собой моментов времени, обусловленных программой геолого-геофизических работ, что позйоляет задавать также необходимую скорость движения судна по заданной траектории. Такимобразом в блоке памяти 4 формируётся необходимая траектория J.8 маневрирования с заданнйми изменениями курса и скорости во времени i и в пространстве координат, X синхронизаторе 5, для данной зафикс№рованной позиции, т.е. на основании данных о местоположении суДна в момент времени относительно заданных координат ii Vi-i ( -li 2 ... n ), на кажДОМ шагу управ31ё1Яйя вычисляется бл№жайшая на заданной траектории точка А С координатами .Х-, | V| , и относительно этой точки А фармкруется массив . синхронизированных координат KCJ ; Ncj (З 1 2 ... Т) заданной траектории от точки А с координатами iV до тошси с коордннатайк Xj VT за время Т, где Т-отрезок времени, меньщий отрезка времени движения по,всей заданной траектории. Ни фиг. 2 пока;зан участок 19 траектории, синхронизированный относительно точки А. Процесс синхронизации позволяет, во-первых, входить в заданную траекторию и любой точке маршрута, во-вторых, избегать непредвиденных сбоев в канале информации о местополо жении судна, и, в- гретьих, Нрерывать tqpo- цесс утфавления но заданной траектории для решения других задач, не предусмот фённых программой работ и возобновл51ть его. Координаты точки А. подаются в вычислительный блок в, на другие входы которого от датчика 1 координат местоположения вводятся координаты X , N . В вычислительном блоке 6 опредёл5вотся отклонения Л, ; координат / , | от координат X - , заданной траектории. Эти отклонения вводятся в программный блок 7, на другие входы которого вводятся значения курса р от датчика 2, значения скорости V от датчика 3, а также поступает массив синхронизированных координат (Xoj Ycj (иГ синхронизатора 5. Программный блок в зависимости от величин и знаков отклонекнй ЛХ-) и NX также в зависимости от величины Ч и V , формирует программные значения курса О) и скорости УП (Т) на время Т для выведения судна на заданную траекторию или для движения по заданной траектории. Программные значения пСТ) и Vn(T) вводятся в экстраполятор 9 и в . 7:7 формирователь 8, программной траекто рии 20 (см. фиг. 2) с массивом координат Xnj t Nn ( 2 ... Т) для выведения на заданную траекторию. Кроме того, в экстраполятор 9, Представ ляющий собой нелинейную адёкватнуто самонастраивающуюся судна, подаются с задатчвка 10 начальные условия,, характеризующие Гйдроаэродинамические хар айтёристики конкретного типа судна,.и с датчика 11 внешние возмущения, характеризующие скорость и направление веора, скорость и направл ние течения, глубину под килем, волнение моря. Таким образом найденные значения ( ) и Vn(T) являются KOHKpeiw ныйи начальными управляющими воздейсйиямй для кстраполятора 9, который для этих начальных условий, ггръ извесо ных значениях возмущающих, воздействий с учетом гидрраэродинамических харак|те|)Встик СУДЕЙ ia Гйдродинамйчеёкюс сил действуют0х; на руль, вырабатывает адекватную реальному Судну экстра- полированную траекто{1шо 21с координатами Xaj 5 Ngj (d 1, 2 ... Т). Координаты э экстраполированной траектории сравнивают в блоке сравнений 12 с координатами Xnj программно траектории, а координаты f экстрапо- лврованной траектории сравниваются в блоке срйвнения 12с координатами N nj программной траек1Ч рши. Причем сравнен бсЗВДёЬтвляется только на участке 22 гзадшной траекториИдНа котором заканчк вйетсй переходный процесс прогнозируе мого движения (см. фиг 2), что позвол ет, во-первых, исключить из рассмотрения вспомогательный участок программн траектории, обеспечивающий выход на аэдйШ й iJSieKTbp шСТвор щий движение, и, Вб-Фтррых, организоват целён аправпенн6с1Ь поиска оптимальных управляющих воздействий в оптимизаторе 13, в который вводятся результаты сравнения Njj и . КрОШ того, в оптимизатор 13 блоком памяти 14 Вво дится максимально допустимая мера ошибки, т.е. макЕИЛ1ально допустимая величина 1 критерия качества . таж l(AXj)4 (av) WJ где V 1, 2 ... Т - номер точки на траектории; К - номер экстраполироi ванной траектории для данной позиции. В оптимизаторе 13 вычвслЙотСя рачения критерия качества J . Если 0;8 значения критерия больше допустимого .-Здоп то в оптимизаторе 13 в зависимости от величины и знака 3 осуществля ется поиск новых значений управляющих сигналов по курсу в скорости, которые пос юдством коммутатора 15 подаются в экстраполятор 9, где вновь, уже для этих новых значений управляющих сигналов, осуществляется экстраполяция новой траектории движения. Таким образом цикл экстраполяции в ускоренном масштабе времени повох)ряется. Бели след.ующее значение кри.. терия качества j , вычисленное в опти-ч мизаторе 13, удовлетворяет условию .3, то найденные таким образом управляющие сигналы по курсу у и скорости V являются оптимальными и посредством коммутатора 15 подаются на исполнительный блок 16 который осуществляет регулировку курса и скорости в соотве т1вии с управляющими cmw налами и V . В следующей зафиксированной позиции весь цикл управления повторяется. Применение предлагаемой автоматической системы управления движением судна позволяет добиться Высокий точное ти и устойчивости управления судндм по заданной траектории с заданной скорое- тью за счет организации управления одно временно по двум контурам (скорости и курса) в единой свютеме утфавления. Формула изобретения Система управления движением судна Содержащая датч:икикурс:а, скорости и координат судна, экстраполятор, первые входы которого связаны с выходами датчика шещнйх в6амуще1аиЙ и задатчйй , начальных условий, а выходы - с одними входами блока сравнения, выходы, которого через оптимизатор соединены с ном. МуТатбром, первые выходы которого под- ключейы ко вторым входам экстраполянтора, а вторые выходы - к исполнительному блоку, о т л и ч а ю ш а я с я теМ, что, с целью повышения точности и надежности системы, она содержит последовательно соединенные первый блок памяти, синхрониаатор, вычислительный блок, программный блок и форм№роватёль программной трае1стории, а также второй 6nok памяти, выход которого подключен к другому входу -оптимизатора, выходы датчиков курса и скорости соедив71йены со вторыми входами nporpaMhtooro блока, третьи входы которого связаны Со вторыми выходами синхронизатора, а выходы - с третьими входами экстрапопятора 1фичем выхЬды дат«шка координат судна; соединены со вгорыиа & оц&ми синхро« нваатора и вычислительного блока, а вь ходы формирователя программной траектории подключены к другим входам блока сравнения Источники информации, принятые во внимание Нри экснертиэе 30 10 1. Патент США № 3670227 кп. Q- 05 15 1/00, опубяик 1972 KA VMLVUX JLt/ f « - 2. КрасоЁский A. A. Системы автоматического управления гюлетом и их аналитическое конструирование. М., Наука, 1973. 3. Александровский И. М., Егоров С. В., Кузин Р. Е. Адаптивные системы -авто. матическрго управления сложными техноЛогическими процессами. М.. Энергия, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движениемплАВучЕгО СЕйСМОРАзВЕдОчНОгО КОМплЕКСА | 1978 |
|
SU842724A1 |
| Устройство для автоматической стабилизации судна с буксируемой сейсмопьезокосой на заданной траектории | 1978 |
|
SU744484A1 |
| Устройство автоматического управления курсом судна | 1989 |
|
SU1716485A1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| Самовсплывающая портативная донная сейсмическая станция без оставления груза на дне моря | 2022 |
|
RU2796944C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| СПОСОБ КООРДИНИРОВАННОГО МАНЕВРИРОВАНИЯ СУДНА | 2010 |
|
RU2429161C1 |
| ВЕРТОЛЕТНАЯ СИСТЕМА НАВЕДЕНИЯ ОРУЖИЯ | 2003 |
|
RU2230278C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА (БАГИС-А) | 1995 |
|
RU2097780C1 |
kY
