дом счетчика, второй вход которого сое- дннек с выходом блока установки начальных сосгойний, вход которого соединен с первым выходом объекта, н с соотвег--ствующ гмй входами первого и второго триггеров 2 .
Недостатком известной системы является низкая точность и быстродействие ц получение только двухуровневых управляющих сигналов.
Целью изобретения является повышеЕше точности и быстродействия системы.
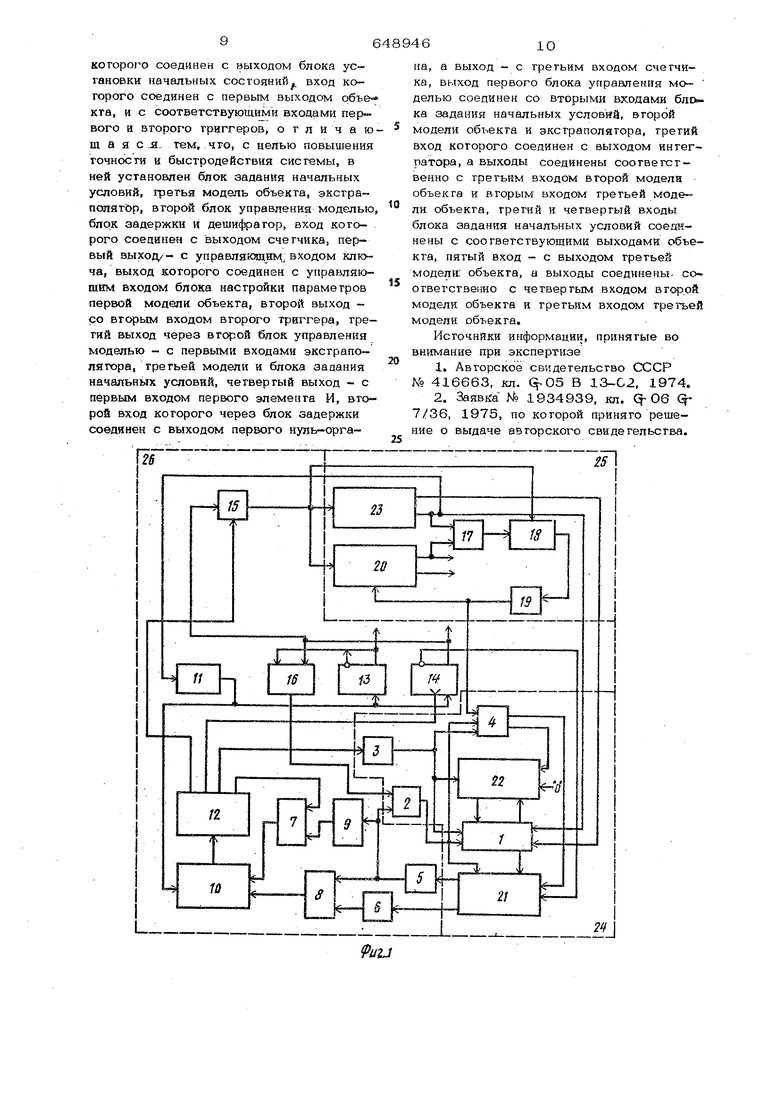
Поставленная цель достигается тем, что в системе оптимального управления неколебательными объектами второго порядка установлены:блок задания начальных условий, третья модель объекта, экстраполятор, второй блок управления моделью, блок задержки и дешифратор, вход которого соединен с выходом счетчика, первый выход - с управляющим входом ключа, выход которого соединен с управляющим входом блока на стройки параметров первой модели хэбъекта,второй выход - с вторым входом второго триггера, третий выход через второй блок управления моделью,- с первыми входами экстрапо ля гора, третьей модели и блока задания начальных условий, четвертый выход-с пвр вым входом первого элемента И,второй вход которого через блок задержки соединен с выходом первого нул1 -органа, а лыходс третьим входом счетчика, выход первого блока управления моделью соединен со вторыми-входами блока задания начал ных условий, BTopoiS модели объекта и экстраполягора,третий вход которого соединен с выходом интегратора; а выходы соединены соответственно с третьим входом второй модапн объекта и вторьи вхо дом третьей модели объекта, третий н четвертыйвходы блока задания начальны условий соедннепЫ с соответствующими выходами объекта, пятый вход - с выходом третьей модели объекта, а выходы соединены соответственно с четвертым входом второй модели объекта и третьим входом третьей модели объекта. На фиг. 1 представлена структурная схема снсгемы оптимального управления неколебательньЕМй объектами второго порядка; на фиг. 2 - оптимальные по расходу топлива ЛИНИЙ переключения.
Предлагаемая система содержит блок i задания начальных условий, блоки 2 и 3 управлення моделью, эксграпоиятор 4, нуль-органы 5 н 6, первый а второй элемент И 7 и 8, блок задержки 9,
счетчик Ю, блок 11 установки начал;, ных состояний, дешифратор 12, триггеры 13 и 14, ключ 15, элемент эезпвалентность 16, сумматор 17, блок 18 настройки параметров первой модели объекта, -яягегратор 19, модели объекта 2О,21 и 22, объект 23, образующие моделирующий блок 24, контур самонастройкк 25 и блок 26 синтеза оптимальных управлений.
Для релейных неколебательных систем второго порядка оптимальными з смысяе критерия7
(,
гдеи. - улравляющее воздейсгаке, ограниченное условием ,о,2К О jT .не фиксировано, который учитывает расход рабочего тела (топлива) и длкгеяь- ность процесса, будут последовательности управлений вида: +имакс .c
ил« -llMoiiC О, +.,акс « маад мш скмальное значение управляюшег
воздействия. При этом управляющее усг ройство, синтезирующее оптимальное ун- равленне в функции фазовых переменных систем, должно реализовать нелинейный закон управления, определяемый на фазовой плоскости уравнениями двух линий переключений. Причем при достижении фазовой точкой первой кривой происходит отключение управления блока (IT О) н имеет место свободное движение системы, а при достижении второй линии переключения, образованной кз частей тра,екторин движения системы при значениях
управления -Имаис Дмакс У Р ющее воздействие принимает соответствующее значение, в результате чего дальнейшее движение системы происходит по нулевой траектории в ааданное конечное состояние,
В случае, когда параметры об1,екга неизвестны или изменяются в процессе управления, построить у1шзанные линии переключателя невозможно. Поэтому необ- ходимо для синтеза управления в процессе движения объекта определять значение его параметров и характер их иаменения, При этом поскольку обе линии переключения оказываются как в стационарном, так и в нестационарном случаях подобны друг другу, отличаясь лишь коэффициентом, значение которого в первом случае постоянно, а во втором может быть рассчитано по соответствующим зависимостям, то оказывается возможным для построения указанных линий использовать убысгренпые модели объекта с эксграполяцней на заданных интервалах времени переменных параметров объекта. Устройство работает следувзщнм образом. Блок 11 установки начальных состояний 11 при отклонении значений координаты объекта Xj от нулевых производит начальную установку триггеров 14, 13 и двухраарядного счетчика 1О в состояние 11 и подключение ключа 15, причем состояние триггеров 13 и 14 выбираегся так, чтобы 11 -Sjrtn Xj . Поскольку на дешифратор 12 в данном случае подается комбинация 11, то управляющее воздействие с триггера 14 пос- гупаег на вход объекта управления 23 я модели объекта 2О, вызывая изменение координат Xi{t),X2(t).X5 {t),Xj (t). Послепние поступают на сумматор 17 для получения ошабки С (t), вызванной изменением параметра объекта, которая затем подается в блок 18 настройки параметров первой модели объекта. Послед ний определяет скорость изменения переменного параметра объекта 23 и посредством интегратора 19 (исполнительного элемента) вводит новое значение переменного параметра Б первую модель объекта 2О. Однако, для синтеза оптимального управления значения переменного параметра в данный момент времени недостаточно, поэтому значения этого параметра в определенные моменты вре- MeHHi,n,(K 1, ..., 7 ) подаются в эксграполятор 4, где на их основании вычислйются будущие значения параметроа для моментов времениt-j +ШД1. , где Ш число шагов прогнозирования, ut - период дискретизации. Экстраполированные значения параметров подаются в режиме решения во вторую и третью модели 21 и 22. Текущие значения фазовых координат объекта X (t) и К„{-) поступают в блок 1 заданияНачальных условий, который ни основании сигналов блоков 2 и 3 управления моделью подает их как начальное условие на модели объекта 21 Поскольку состояние триггеров 13 и 14 Б данном случае одинаково, го элемент эквивалентность 16 выдает сигнал , а дешифратор 12 при входной комбинации 11 также выдает 1, то бло ки 2 и 3 управления моделью включают в режимы решения соответственно модели объекта 21 и 22, При этом модель объекта 22 решает уравнение движения при значении управляющего воздействия О, а модель 21 приигп.„-11 Это позволяет, используа модель объекта 22 для построения траектории движения объекта 23 при нулевом значенииуправления, рассчитать коэффициент подобия, необходимый для сканирования моделью объекта 21 первой линии переключения объекта. При достижении координат модели объекта 21 Х2 () значения, равного . нулю, нуль-орган 5 вырабатывает сигнал, поступающий на элемент И 8, блок задержки 9 и блок 2 управления моделью. Последний переводит модель объекта 21 в исходное состояние, при котором текущие координаты (модели-объекта 22 ),, . вводятся в модель объекта 21 как наче ьныё условия, при этом элемент И 7 находится в состоянии О. После чего модель объекта 21 ввиду изменившегося после введения ненулевых начальных условий нуль-органа 5, а значит и блока управлений 2, вновь включае1ся в режим решения. Эгот процесс проводигся доГ . пока не выполнится условие тех пдо. V М для коордИ X JMS ( ) О нат модели объекта 21, при этом сиг-н&чы нуль-органов 5 н 6 через элеменд И 8 изменяют состояние счетчика 1О, делая его равным 10, В результате cvIгнaлJ с .дешифратора 12 поступает на .блок управления 3, который переводит модель объекта 22 в исходное сосгойние, при этом происходит фиксация эксг. раполятором 4 значений изменяемого параметра, отвечающего данному моменту времени, К следукяцему такту реша ния модели объекта 21, наступающему после введения бпоко л 1 задания начальных условий прежних .текущих значений ), X2(t) фазовых координат объекта 23, эксграполятор 4 рассчитывает на основании ранее зафиксированного значенйя параметра модели 2О, коэффициент подобия и вводит в модель объекта 22 при решении уравнения динамики экстраполированные значеЕшя параметра с данным коэффициентом подобия. В результате этого моделью объекта- 21 строится траектория, подобная первой . линии переключения ЬОй ( см. фиг, 2); Однако, если,фазовая точка объекта 23 еще не достигла этой линии переключения (точка В на фиг. 2), то посгроеняая мода-шю 21 граек1чэр1 я при .рассчитанном коэ44 циенге подобна непройдет через «ач ал о координат а а&- обходимо вновь повторить весь цккп рв шечйй, В этом случае лишь кооряинага Хо С.-), модели объекта 21 досги-. гае г зиачеи ш, равного нулю, с Нуль-юргана 5 чераз блок зад©рж.к55 9 к элеменг И 7 воавращааг счетчак Ю в сосгояние 11, пр0 этом вторым снгпалоы, tiocrysiafoiuRM на вход И 7, явлЯ7ЮЯ сигнш с дешйфрагора 12, вызванный со стоянием счетчика Ю. При этом в мо дель объекта 22 вводягСй текущее знаHBHSie Х (t), Х2 {t ) фазовых координат объекта. 23, блок управпвния мо- дельго 3 вновь вюгючает модеггь объекта 22 в режиь решение н ранее рассмогр&тилй яроцесс повгоряегся. Это продол жаегса 1К тех Fiop, пока в резупыаге решений моделью объекга 21 при введенном с экстраполягора 4 коэффшиенге подобал координагы X и X одЕ5О не егануг равными нртю, пе, построеякаи траекгорня йе совпадавг с одной 6S3 аервьгх яннай переключен ш РО н POi ,
В этом случае сигналы с нуль-оргаяс 5 к 6 через элемент И 8 переводят счетчйк 1О из сосгоЕнкя Ю в cocтo яийе О1,при этом элеменг И 7 не ус пел C|ja6orairb5 гак как сначала был сйг кал с йе Шифратора .12, яо не было сигн зла 1 с нупЬ «оргева 5 зследсгвие блока аадерю си 9 затем он появился, но гогаа на дешифратор 12 была уже подана комбЁйЕщнй , В резуушгате БС& го а;|юасжоянг огкяючение ключа 15 и че pes бйок унрааяевЕш моделью 3 модепн объекга 22,
Пря эгом упраБ||вние IT на входе объекга стансжйгся равным О, а модел объекга21 теперь решает уравнения данамики объекга 23 при начальных усновиях, соогзегсгвуюшйх гекущш ; значеHHsibi координат обьекга, Тедерь при выполнений услсжйя Х (V) ixy() о, что указыва eJE на совпадение граекгорин модели объекта со второй лннкей переключения РО или РО , проЕсходиг срабатывание элемента И 8, при этом состояние счег«чика Ю станет ОО, что вызовет подгетючакйе ключа 15 и изменение состояння триггера 14, 8 регультате того, что состбйние триггеров 13 и 14 рввпичное, элемент эквивалентность 16 шлеет на выходе сигнал О , чго выво-
вег отключение модели объекга 21 черва блок управления 2 от периодического режима решение к перевод в режим эаданке начеипьных условий
Такшл обраао реализуется требуемый оптимальный ангорагм уцравлеиия, сосго- ящнй как в оп)еделенн - ралеЙЕЮго управления нужного знааа, так и в замене им предьщущего нулевого управления.
При достнженяи регулируемой координатой объекта t ) заданного кулевс го аначения дешифратор 12 отключает ключ 15, чем обеспечивается сохраиенае сколь угодно долго заданного конечного состояния объекга.
Введение новых элементов - дешифратора, блока задержки второго ока управления, экстраполятора, третьей модели, блока задания качалъкых условий и их соединение с имеющимися эле- меЕ{гама позволяет воспроизведением двух линий переключения повысить точность реализации процесса управления некопебательными объектами второго порядка с переменными параметрами, а также повысить быстродействие устройства управлений.
Формула йэобрбтення
Система оптимального упраатениа объектами второго порадка, содержащая первый элемент И, су,магор, входы которого соединены, соответственно, с первым выходом объекта н выходом первой модели объекта, а выход через последовательно соединенные блок настройки параметров первой модели объекта и ин тегратор соединен с управлякядим входом первой модели объекта, вход которой соединен со входом объекта и выходсал ключа, вход которого соединен с первым входом элемента эквивалентность, второй вход которого соединен с выходом первого триггерВг и первым выходом второго триггера, второй выход которого соедннен с первым входом второй модели объекта второй вход которой через первый блок управленая моделью соединен с выходом элемента дквн&алентносгь, первый выход через первый нуяь-орган со вторым входом первого блока управ пвшш и с одним из входов второго эле менга И, а второй выход через второй ну7 Ь орган - с другим входом второго элемента И. выход соединен с первым входом счетчика, второй вход
которого соединен с ныходом блока усгановки начальных cocroяний. вход когорого соединен с первым выходом объ& кта, и с соответствующими входами пер вого н второго триггеров, о гл и ч а ющ а я с тем, что, с целью повышения точноеги и быстродействия системы, в ней установлен блок задания начальных условий, третья модапь объекта, эксграполягор, второй блок управления моделью блок задержки и дешифратор, вход которого соединен с выходом счегчика, первый выход/- с управляклцнм, входом ключа, выход которого соединен с управляющим входом блока настройки параметров первой модели объекта, второй выход со вторым входом второго триггера, третий выход через второй блок управления моделью - с первыми входами экстраполятора, третьей модели и блока аацания начальных условий, четвертый выход - с первым входом первого элемента И, второй вход которого через блок задержки соединен с выходом первого нуль-органа, а выход - с третьим входом счегчи- ка, выход первого блока управления моделью соединен со вторыми входами блока задания начальных условий, второй модели объекта и экстраполягора, третий вход которого соединен с выходом интегратора, а выходы соединены соответственно с третьим входом второй модели объекта и вторым входом третьей модели объекта, третий и четвертый входы блока задания начальных условий соединены с соответствующими выходами объекта, пятый вход - с выходом третьей модели объекта, а выходы соединены- соответственно с четвертым входом второй модели объекта и третьим входом третьей модели объекта.
Источники информации, принятые во внимание при экспертизе
1,Авторское свидетельство СССР
№ 416663, кл, (05 В 13-02, 1974.
2.Заяв1гаNO 1934939, кл. Q-06 Q7/36, 197S, по которой принято решение о выдаче авторского свидетельства.
h f )
4v)
ч-)
)
ВчМД1 М1Ч1ЦД№Ч/Ц|№ «Ь
ГТТТТпГлТУгТТ
.,(V} )
(Sxf;
| название | год | авторы | номер документа |
|---|---|---|---|
| Система оптимального управления объектами второго порядка | 1981 |
|
SU954934A2 |
| Система оптимального управления колебательными объектами произвольного порядка | 1983 |
|
SU1092467A1 |
| Система оптимального управления объектами второго порядка | 1980 |
|
SU920634A2 |
| Система оптимизации управления непосредственно и косвенно управляемыми объектами | 1982 |
|
SU1080117A1 |
| Система оптимального управления | 1979 |
|
SU824140A2 |
| Система оптимального управления с моделью объектами второго порядка | 1980 |
|
SU888071A1 |
| Система оптимального управления объектами второго порядка | 1976 |
|
SU643833A1 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU798704A1 |
| Устройство для синтеза оптимального управляющего воздействия | 1973 |
|
SU657409A1 |
| Сеточная модель | 1987 |
|
SU1483469A1 |

