Изобретение относится к ирибогкп л.чя нроверкн состояния кривыч частков рельсового пути, но с/юсобу замера стре;: изгиба иути дугами и стягиваюидилп их .
Ве.т 1чина требуемо pe.ibcoiioio иути в ;чрии1 х о 1реде,тяется как удвоенная а.тгебра1 ческая сумм разносте ; стре.1, иос.педо ;ате. оиределеиных д,-|я точек jXiMiiioii io задаии,м ироектиым стре.там и по стрелам измереииь м i атуре.
В ред.лагаемом ириборе. с 1е, облегчения 1одсчето15, прибор) .11очает н себя счетно-реша() механ 1зм, автоматичесю модсчить па {)И1.1П1 результаты измереииГ и 1еиос)едствеиио 1оказання требуемо сдвижки .
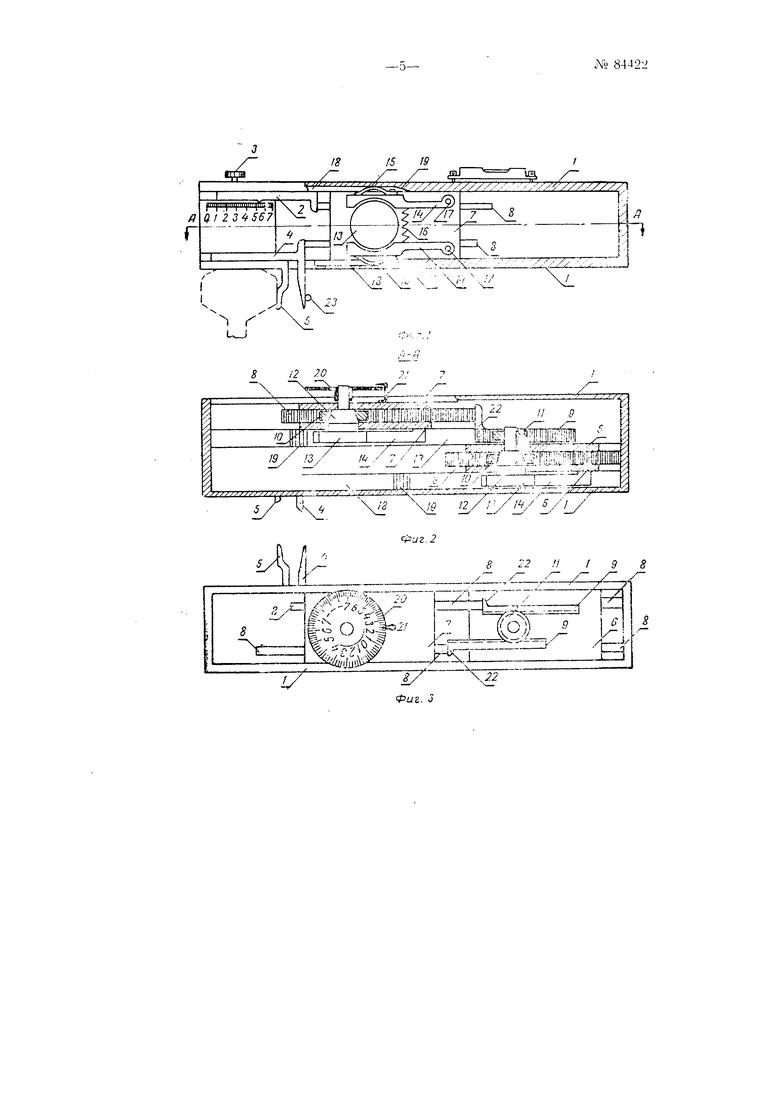
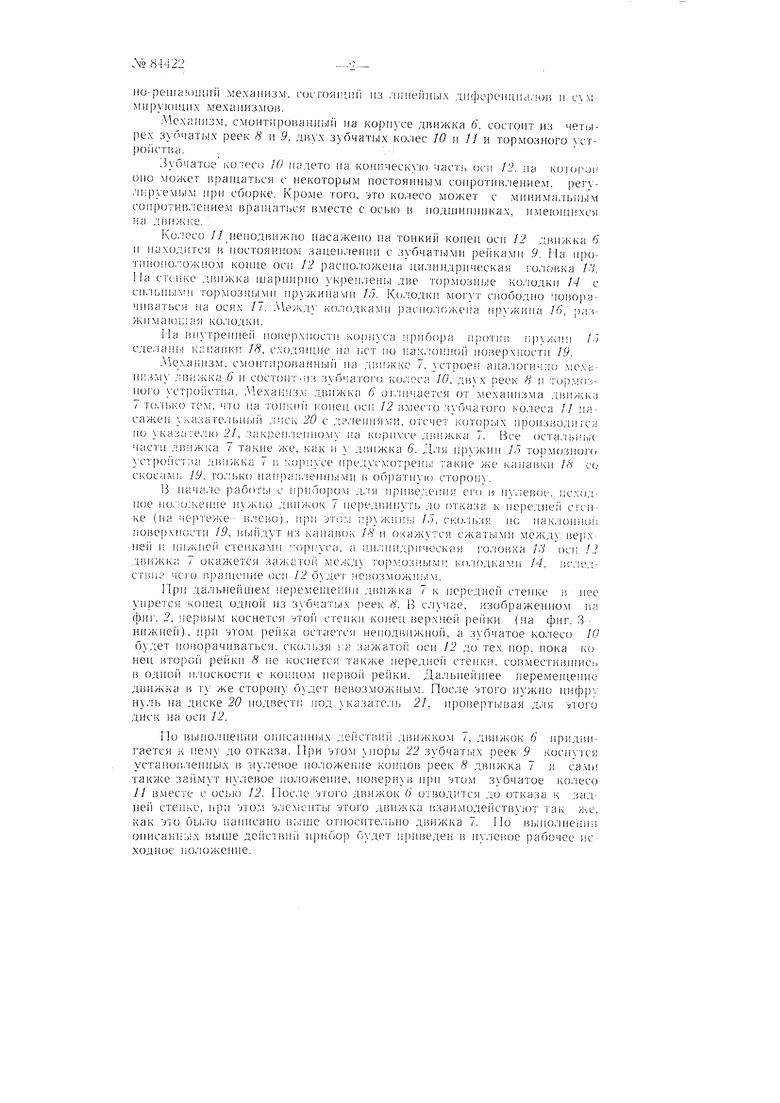
На фнг. 1 чертежа )ид с 1ереди и частично i разрезе; на фиг. 2-разрез его ю/1/1; ia . 3--вид p i6opa .сзади.
В передней части / рибора (c. по чертежч) расноложень два иодвижнь х уиора 2 -/ и ие 1одвижны11 уиор 5. Верхни унор 2 имеет указатель, 1од которым и..метровая шкала. Но iTOii И1ка,те во время ) - устаиав.1 1вается на ве.Ичииу i poeKTHoii стре.чы и может (ii,-r, 1е ихЧ ИЖ11о ири номощ CTO iO 5iioro винта -3.
ижии11 унор -/ с,|уж(т д.;я 1 змере 1 я рассто, от Xi,iOBK i pe.ibса до инура 2.У, 1атяпут()о xoj.vie i;iмepяe o;i KpiiHoii частка ихтн. Этот yiiop может бьггь закреме стоио 5ным винтом, не оказанlibiM мл чертеже.
no.)ie у.чорь (2 -/) мо/кио 11ерел еиха ь pii и).кици чрема.ть ер (иа чертеже не оказань). )ом ;) прижимается к М утреннеГ| рабоче: -раии оло1 1 рел1)Са.
кориуса 1 рибора а движках 6 } 7 с.моит ро1;ан счетiio-peiiiaiouuiH механизм, ((ятояпип из .iiineiinijix диференциа.Н) и с х; мирукинпх мехапиз.мов.
Механизм, CMOHTitpoiiaHiibiii на корпусе дпижка 6. состоит из четырех зупчатмх реек 8 и 9, л)ух зубчатых колес 10 н // и тормозного стf)oiicTp,a.
3 -бчатое кодесо П) надето на коническхю часть оси 12. на кот(Л01 оно может вранип-|,ся с некоторым постоянным сопротивлением. |)егулнруемым нрн сборке. Кроме того, это колесо может с мпни гaдьi ым сопротивлением вран1аться имеете с осью в ноднн-1пппках, н.е1О1пнхся на .
Ko.ieco // неподвижно насажено па тонкий конен оси 12 движка 6 н находится в постоянном saueii.ieHiui с зубчатыми рейкамн 9. На иротивоио.;ожиом конне оси 12 расно.южена ни,лнндрнческая головка /Л. 11а стенке .вижка шарнирно ук|)ен;1ены две тормозные ко.чодки 14 с си.:1ьнылП1 тормознымн иружинамн 15. К(;..юдки могут снободио юворачиваться на осях 11. Ме/кд} ко.юдками pacHj.хожена 1|1ужнпа 16, разжнмаюша.я ко.юдки.
Ма внут)енне1( поверхности корпуса прибора npoTii; пр /-кнн : сде.таны каиа1н и 18, сходя1цие иа ист по нак.онно но; ерхности 19.
, смонтнр015анньи Г иа дл.пжку 7. -cTpoei ана.югичис; .:cxaН1;зму лвижка 6 н состоитНз зубчато1(о ко.леса 10, двух реек 8 и то)М():;; иого устрк)1ства. Д1ехаииз.; Д15ижка 6 ог/.ичается от мехаиизма дцижка 7 T(,) те.м, что па тоиь;н| | коиен оси 12 вместо з бчатого i-.o;ieca // нясажен указате.1вньп | ;j.4Ci-; 20 с де,1ення ;и, отсчет кот());)Гх нропз15одн гс;; но :e.iK) 21, закреп.1епному j4a корпхсе двнжка 7. Все ()ста.1ьпь;( части движка 7 такие же, как и д,нжка 6. ZLiii иружин 15 TopM(j3nor(j устро |ст;1а 7 i; корпусе предусмотрен -, гакие же канавки /rS cKOcawi. 19. наира:,/ епными в обратнхю сторону.
13 пача.чс работы с приб() д.ля нрнве.чеиия его и ну.1ег,ое. иcx(JДиое но,.ч;:ке1И1е дви:Ь;ок 7 иеред15нпуть д,о от1чаза к пе)едне1( сгспке (иа чертеже-- влево), п)н :JTOM пр Ж1пИ;1 /,), CKO.1B3S; по нак.юнно поверхностн 19, гнзпКдут тз капавок 18 и окажутся сжатьгмн между вер.хHeii и нп/кпей стеикалп ., а ии.пшдрическая го.ювка 13 оси /J ;iP,ii/KKa 7 окажется за/1-;атой д-ежду Top.;o3iii) |ч:о.1одка.н 14, . ЧС1Ч) p,) осн. 12 .невозможным.
При .га.чьнейншм перемещении Д15нжка 7 к передней сте1и е в нее унрется конен одной из з бчатых peei 8. В случае, нзображенно.м па фиг. 2, первв1М коснется vToii стенки верхнеГ рейки (на фиг. 3 нижнеГ:), HJIH этом рейка остается иеиодг ижиоГ, а зубчатое ко.тесо 10 будет ио(50рачнват1 ся, ско.чьзя га зажатоС: оси 12 до тех пор. пока ко нен вто) ре11ки 8 ие коснетея также передней сте1- ки, еовмести1 Н1ис;) в ОДНО плоскости С KOiniOM iiepBoii . Дальнейн1ее неремен1,енне движка в ту же сторону будет невозможньгм. После этого нужно н1-и|:р нулв на днеке 20 нодвестн иод -казатель 21, провертывая для этого диск на оси 12.
По вв1но,1нении оннсапных д..ий Д1)ижко.1 7, Д15ижок 6 иридвигается к иему до отказа. При это.м норы 22 зубчатых реек 9 коснутся устапо1.денных в ,, но.ложе1П1е концов реек 8 Д15нжка 7 и са.ми также н тевое по.юженпе, повернув н)н это.м зубчатое ко.леео 11 вместе с- осью 12. Пос.че это1о движок 6 отводится до отказа к задueii етег1ке, при этом элементы этого дв1-1жка взаил1оде11етву1от так ь.е, как это было HainicaHo lii.iuie относите.чьно движка 7. По выиолнени; описанных выше де 1ствН1 | прибор будет нр1П)еден в нулевое рабочее исходное ноложеине.
Для определения сдвижек рельсопого пути при помощи прибора нужно выполнить следуюпше деПстви ;.
1.Верхний упор 2 в кажло ; ючкс кривой хстакавлпвается по миллиметровой шкале на задаиичК ирое/чтол г,е:1ичин стрелы для данн011 точки и закрепляется к :;о.(::;:е:;:;: :;оперным впитом ,3.
2.Прибор передним к;, j отся па голозку рельса, прижимается неподвижным упорол; л i; п::;. треине: грани го.чозки рельса и приводится в горизоита. iKiioKeinis. Затем упор 4 плавно выдвигается до conpHKOCiiuiseni;.; со и ;уром 23, натяиутым ио хорде, и закрепляется в этом положении стопорным винтом.
3.Движок 6 из исходного иоложеиия перемещается к переднему концу прибора до тех пор, кока обе его зхбчатые рейки 5 не коснутся иодвижных упоров, после чего движок снова отводится к задней стенке в рабочее исходное положение.
4.Движок 7 из исходного ко.южеи.и.я перемещается i:o наиравлепию к заднеГ етеике, где .питаете.ч на упоры 22 н вновь отводится в рабочее исходное 1:о.1оже1и; :- к иерелне степке. После этого на диеке показана ве.чичина слиижки i ми.тлиметрах.
Определение ве.личины л.1л всех послед чоии;х точек пап ной кривой производится noiri-opeiine.; о:11;саииых выи;е операций.
перемещен 1И ;ii5n;i4i:a О из iiy.ieBoro исхолного юложепия ио направ;1енню к 1ередие-.:у 4C;i;;iy ::рибора T(;pMo:s:ioie iipy ic:iHbi /Л заходят в канавки /о, ири VIOM ир ЛчИиа 16 разлнииег гормозн|,1е колодк11 14 и ось 12 ii03Mo i4i j.:;i) с:;-оО:;диого вращения к иодшниннка.ч движка 6.
,ы нодвпжных yiioptiH. i оГ)Иг:-;М с.чучас, не г аходитьс: одноГ плоскости, так как ве.шчиим ироектиькх стре.:, обычно, не равная величинам стрел, изл;ереииых и натуре, поэтому концы зубчатых реек ( н 9. совмеп1епные в нy,тe:н)i исхо.чпо.: ио,:оже1Н и в одну плоскость, при перемещении движка иере. :-;ос11утся подвижн1)1х упороп не одно15ре.меппо. В , 13ображо.ч:.н:)-.; па чертеже, верхмяя peiiKa 8 коен стась проектного упора 2 прс-жде и осталась ненодвнжно прн дальпе |HjeM неремещен1П движка. Вс.тедстви.е это1о, зубчатое колесо 10, находясь в зацеп, с 8. иог, на некоторый уго,:, пропорциональный разности нрч) и из,;ерен11О1 | стре.т. Одновременно с зубчатым колесом 10 иоверп лась и ось 12. а неподвижно насаженное на нее зубчатое колесо // и зубчатые jieiiKH 9 емести,пись пз нулевого положения на ве.тичину, ирО 1Орциона, разности стре,т, установленных на нодвижных унорах.
При возвращении движка li исходное положение головка 13 оси /2 будет зажата тормозны.мн кo, н ось, при выравнивании концов зубчатых реек в исходном рабочем по.тоже1П1и, останется неиодвижно ) вместе с зубчатым колесом // и з бчатымн рейками 9.
При повторении описанных вьине четырех операцн будет каждьп| )аз автоматически нронсходить алгебраическое сумхифование разно стей етрел и уиоры 22 зубчатых реек 9 будут в любой точке смещены на величину, проиорциона,тьнук) а..т1ебраическо| 1 сумме разностей стрел.
При неремещении дщгжка 7 из нулевого исходного иоложения до сонрцкосновения его реек 8 с ио|1а 1и 22 первого двпжка, рейки 8 сместятся иа ту же величииу, на KOTopyso CMemein i уиоры 22, т . е. на величину разности сгрел. Вследствие с.мещения реек 8 повернется зубчатое колесо 10, а с ипм ось /2 н отсчетньи диск 20. иа котором мож1 0 будет ирочитать по указателю величину, равную разноети етрел.
При возвращеннн движка 7 в рабочее иеходное положение оеь 12
-3-J fo 84422
Л1о 84422--4-
останется неподвижной и отсчет на диске не изменится.
При ноиторении оинсанных оиераниГ новорот диска каждьи раз будет изменяться на величину, ироиорниоиа.;1Ы1у10 CVMMC |)( стре., т. е. будет происходи ь ,1ироиа1нн5 с .мм разиостс ; CTPC/I, но ,мучаемых нри 1К).10И1И лиижка 6.
Удваивание суммы )азносте| | ст)ед будет нодучено иутем соотиетстиук;нм1х иерода Ч}чпь х чисел. TaKiiM образол: на диске, точке Kpiiiioii, можно и|г()чнтать ве.пичину сдвижки в .метрах.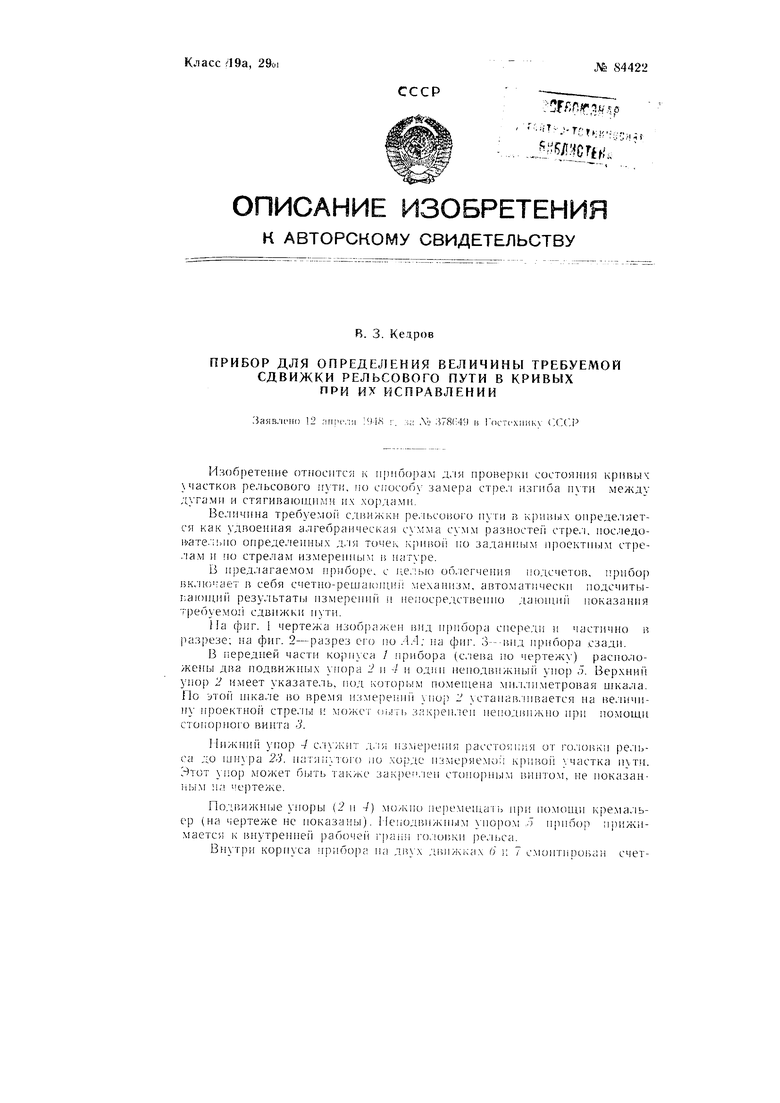
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения величины площади, заключенной между линиями двух графиков, вычерченных на ленте | 1944 |
|
SU84529A1 |
| Контрольный прибор для определения величины отклонений натурной кривой рельсового пути от ее проектной формы | 1944 |
|
SU84837A1 |
| ПРИБОР ДЛЯ РАСЧЕТА ЖЕЛЕЗНОДОРОЖНЫХ КРИВЫХ | 1944 |
|
SU69645A1 |
| Устройство для записи плана в виде угловой диаграммы пройденного рельсового пути | 1943 |
|
SU68627A1 |
| Способ ослабления канатов подвески стрелы экскаватора при их замене | 1986 |
|
SU1423697A1 |
| Кассета для деталей | 1986 |
|
SU1342664A1 |
| Кран на тракторе | 1958 |
|
SU115794A1 |
| Устройство для раздачи корма рыбам в садках | 1987 |
|
SU1517876A1 |
| Устройство для перемещения вагонов | 1959 |
|
SU132269A1 |
| Вычислительное устройство | 1985 |
|
SU1283799A1 |