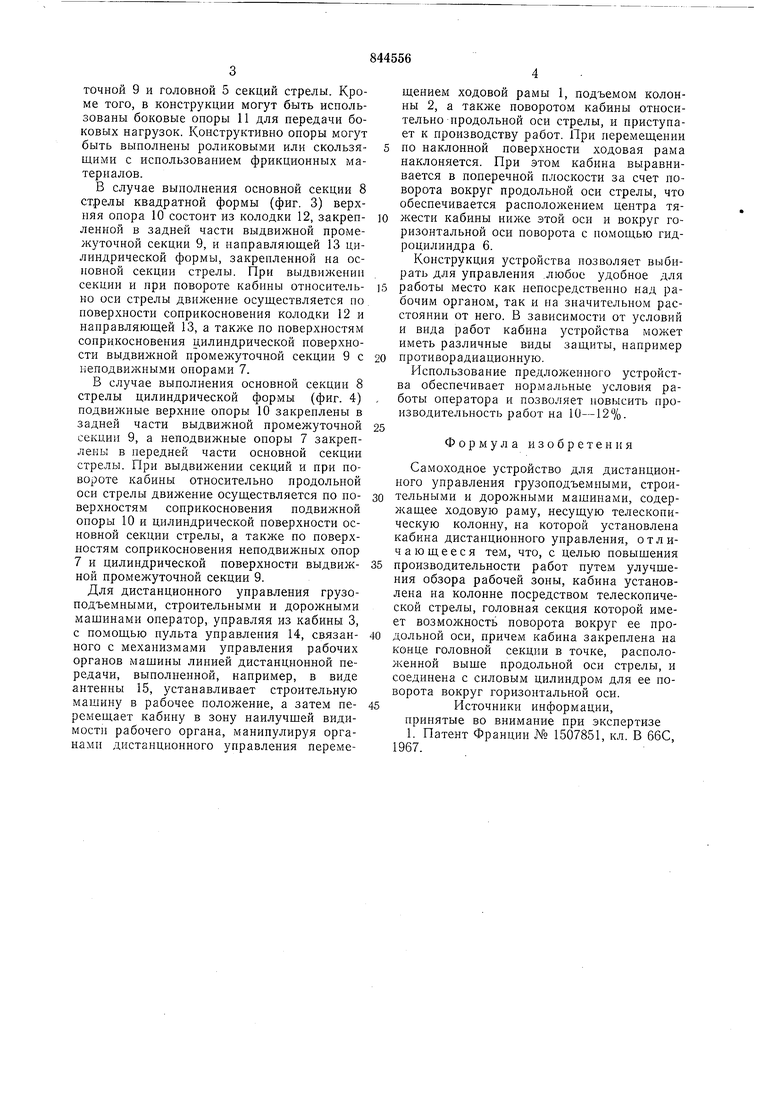
точной 9 и головной 5 секций стрелы. Кроме того, в конструкции могут быть исцользованы боковые опоры 11 для передачи боковых нагрузок. Конструктивно опоры могут быть выполнены роликовыми или скользящими с использованием фрикционных материалов.
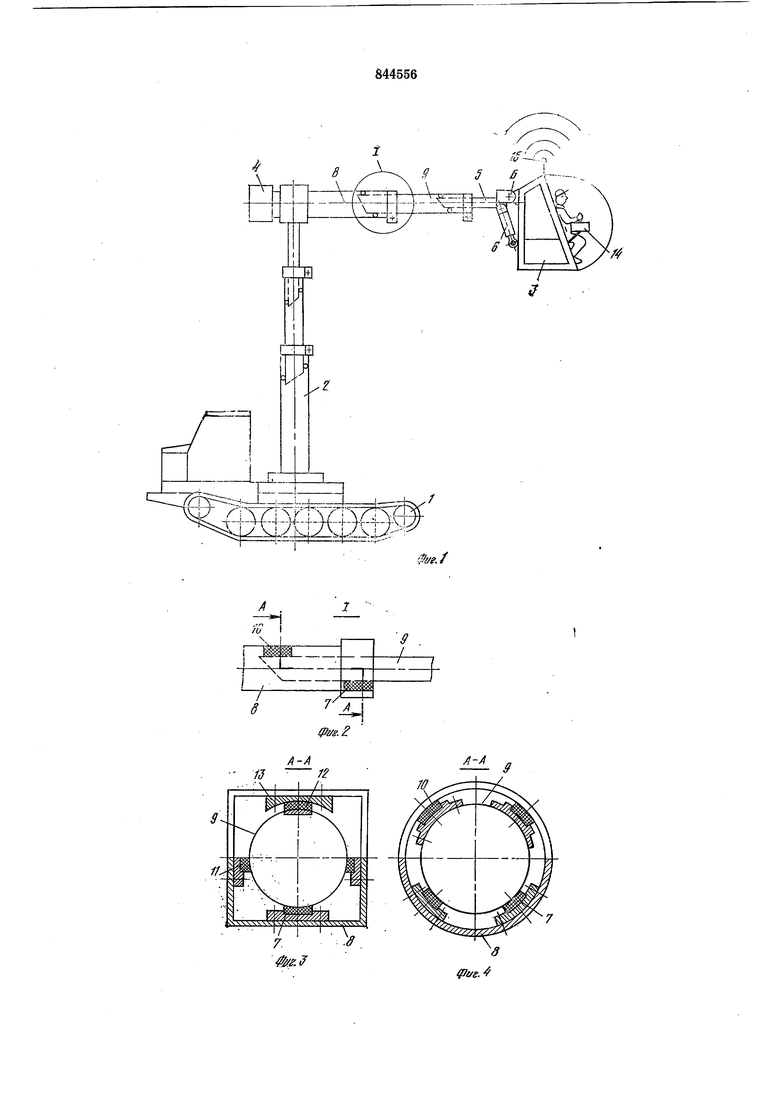
В случае выполнения основной секции 8 стрелы квадратной формы (фиг. 3) верхняя опора 10 состоит из колодки 12, закрепленной в задней части выдвижной промежуточной секции 9, и направляющей 13 цилиндрической формы, закрепленной на основной секции стрелы. При выдвижении секции и при повороте кабины относительно оси стрелы движение осуществляется по поверхности соприкосновения колодки 12 и направляющей 13, а также по поверхностям соприкосновения цилиндрической поверхности выдвижной промежуточной секции 9 с неподвижными опорами 7.
В случае выполнения основной секции 8 стрелы цилиндрической формы (фиг. 4) подвижные верхние опоры 10 закреплены в задней части выдвижной промежуточной секции 9, а неподвижные опоры 7 закреплены в передней части основной секции стрелы. При выдвижении секций и при повороте кабины относительно продольной оси стрелы движение осуществляется по поверхностям соприкосновения подвижной опоры 10 и цилиндрической поверхности основной секции стрелы, а также по поверхностям соприкосновения неподвижных опор 7 и цилиндрической поверхности выдвижной промежуточной секции 9.
Для дистанционного управления грузоподъемными, строительными и дорожными мащинами оператор, управляя из кабины 3, с помощью пульта управления 14, связанного с механизмами управления рабочих органов мащины линией дистанционной передачи, выполненной, например, в виде антенны 15, устанавливает строительную машину в рабочее положение, а затем перемещает кабину в зону наилучщей видимости рабочего органа, манипулируя органами дистанционного управления перемещением ходовой рамы 1, подъемом колонны 2, а также поворотом кабины относительно продольной оси стрелы, и приступает к производству работ. При перемещении 5 по наклонной поверхности ходовая рама наклоняется. При этом кабина выравнивается в поперечной плоскости за счет поворота вокруг продольной оси стрелы, что обеспечивается расположением центра тяжести кабины ниже этой оси и вокруг горизонтальной оси поворота с помощью гидроцилиндра 6.
Конструкция устройства позволяет выбирать для управления .любое удобное для
5 работы место как непосредственно над рабочим органом, так и на значительном расстоянии от него. В зависимости от условий и вида работ кабина зстройства может иметь различные виды защиты, например
0 противорадиационную.
Использование предложенного устройства обеспечивает нормальные условия работы оператора и позволяет повысить производительность работ на 10-12%.
Формула изобретения
Самоходное устройство для дистанционного управления грузоподъемными, строительными и дорожными мащинами, содержащее ходовую раму, несущую телескопическую колонну, на которой установлена кабина дистанционного управления, отличающееся тем, что, с целью повыщения
5 производительности работ путем улучщения обзора рабочей зоны, кабина установлена на колонне посредством телескопической стрелы, головная секция которой имеет возможность поворота вокруг ее про0 дольиой оси, причем кабина закреплена на конце головной секции в точке, расположенной выще продольной оси стрелы, и соединена с силовым цилиндром для ее поворота вокруг горизонтальной оси.
Источники информации,
прииятые во внимание при экспертизе 1. Патент Франции № 1507851, кл. В 66С, 1967.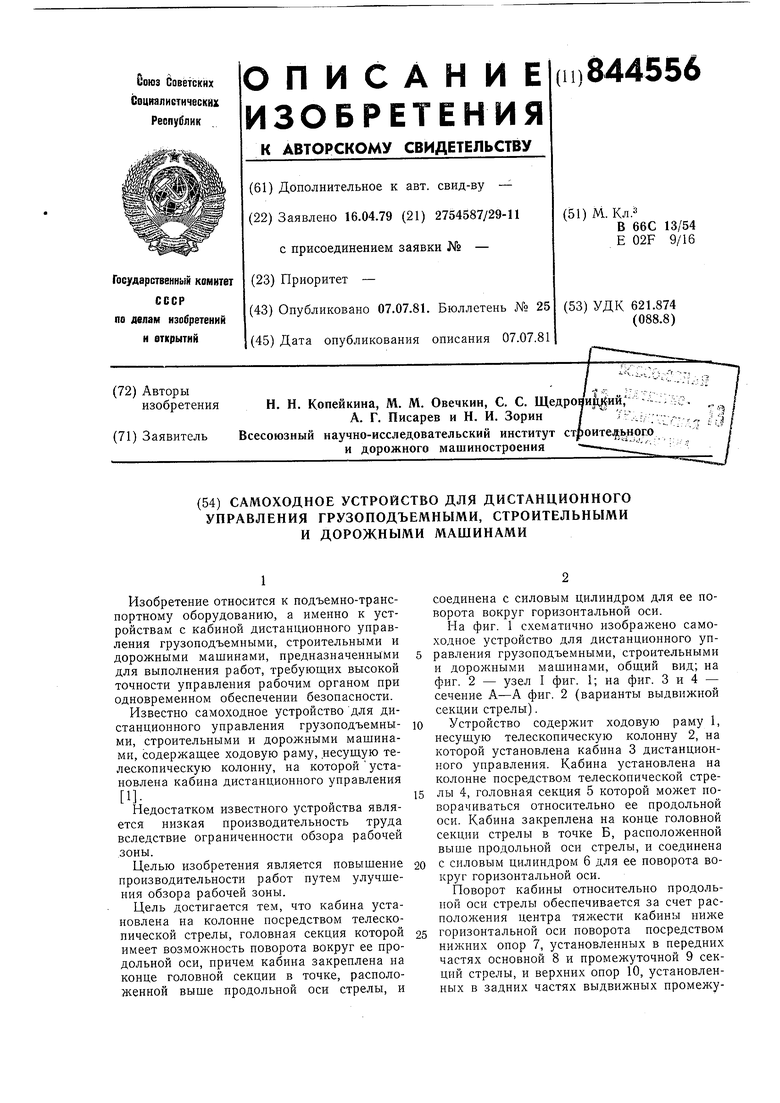
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДЪЕМНИК АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ | 2009 |
|
RU2399578C1 |
| КРАН СТРЕЛОВОЙ САМОХОДНЫЙ | 2015 |
|
RU2599741C2 |
| КРАН СТРЕЛОВОЙ САМОХОДНЫЙ | 2012 |
|
RU2495816C1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 2002 |
|
RU2202877C1 |
| УСТРОЙСТВО ДЛЯ ПОДЗЕМНОЙ РАЗРАБОТКИ МОЩНЫХ И КРУТОПАДАЮЩИХ ЗАЛЕЖЕЙ КАЛИЙНЫХ РУД | 2013 |
|
RU2540736C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| АВТОМОБИЛЬНОЕ КРАНОВОЕ ШАССИ | 2018 |
|
RU2684838C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
lU I
