1
Изобретение относится к подъемнотранспортному оборудованию, а именно к грузозахватным устройствам с дистанционной отцепкой груза.j
Известно захватное устройство, содержащее корпус, :выполненный из двух щек, между которыми закреплен грузовой крюк, и трос для дистанционного управления захватным устройством 1. Q
Недостатком этого захватного устрюйства является низкая надежность при подъеме и транспортировке грузов так как устройство может работать только со специальным крюком, у которого глубина зева значительно мейьше, 15 чем предусмотренной ГОСТом (при большой глубине зева крюк не выходит из строповочной петли), а также опасность самопроизвольного захвата при расстроповке груза, так как устрой- Л ство не фиксируется в раскрытом положении, и большой вес, так как несущими .элементами устройства являются крюк, корпус и ось крюка.
Цель изобретения - повышение надеж- ности в работе.
Поставленная цель достигается тем, что устройство снабжено шарнирно прикрепленным к корпусу и соединенным с ним пружиной предохранителем, пре- 0
дотвращающим самопроизвольное расцепление крюка от петли, и подпружиненным фиксатором, установленным в корпусе и предотвращающим его поворот относительно предохранителя, при этом крюк закреплен неподвижно, в предохранителе выполнено отверстие для подпружиненного фиксатора, а трос прикреплен к корпусу.
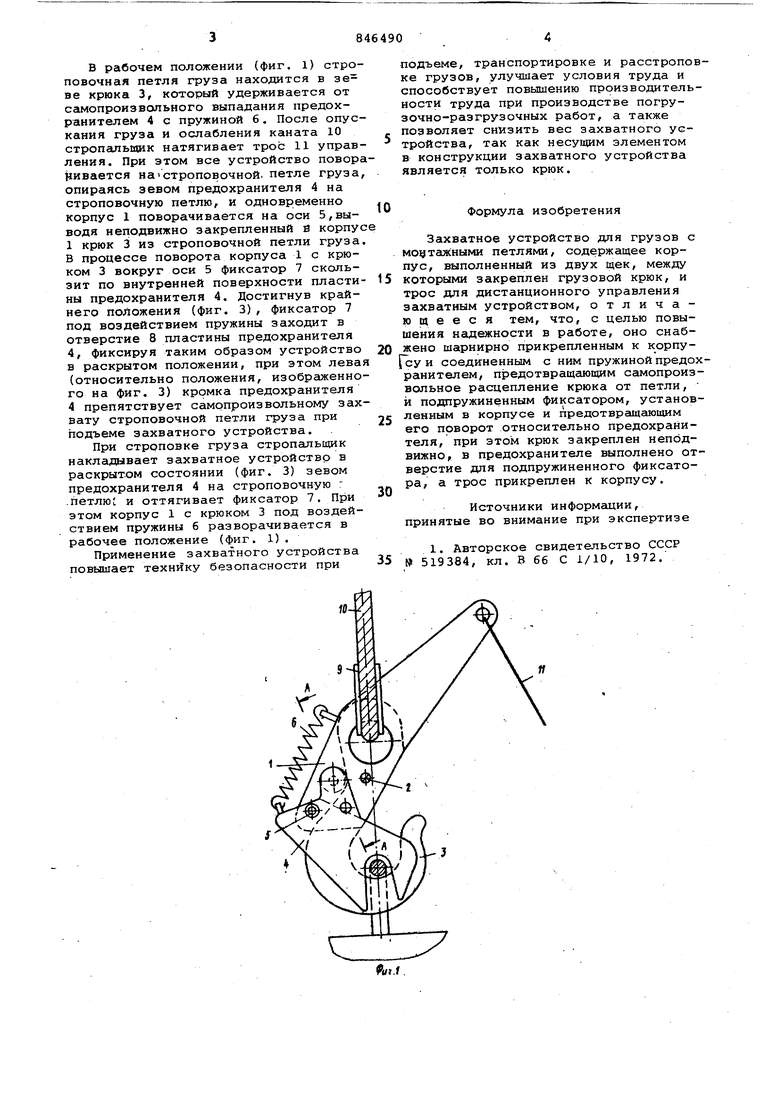
На фиг. 1 изображено захватное устройство в рабочем положении; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3захватное устройство в раскрытом положении .
Захватное устройство содержит корпус 1, выполненный из двух щек, в котором посредством винтов 2 неподвижно установлен крюк 3, предохранитель 4 шарнирно прикрепленный посредством оси 5 к корпусу и соединенный с ним пружиной 6, подйружиненный фиксатор 7, установленный в корпусе 1. Предох.ранитель 4 имеет отв ерстие 8 для подпружиненного фиксатора 7. Посредством ковша 9 устройство подвешивается на канате 10. Трос 11 для дистанционной расстроповки прикреплен к корпусу 1.
Устройство работает следующим образомуВ рабочем положении (фиг. 1) стро повочная петля груза находится в зеве крюка 3, который удерживается от самопроизвольного выпадания предохранителем 4 с пружиной 6. После опус кания груза и ослабления каната 10 стропальщик натягивает трос 11 управ ления. При этом все устройство повор Нивается на-строповочной. петле груза опираясь зевом предохранителя 4 на строповочную петлю, и одновременно корпус 1 поворачивается на оси 5,выводя неподвижно закрепленный и корпу 1 крюк 3 из строповочной петли груза В процессе поворота корпуса 1 с крюком 3 вокруг оси 5 фиксатор 7 скользит по внутренней поверхности пласти ны предохранителя 4. Достигнув крайнего положения (фиг. 3), фиксатор 7 под воздействием пружины заходит в отверстие 8 пластины предохранителя 4, фиксируя таким образом устройство в раскрытом положении, при этом лева (относительно положения, изображенно го на фиг. 3) кромка предохранителя 4 препятствует самопроизвольному зах вату строповочной петли груза при подъеме захватного устройства. При строповке груза стропальщик накладывает захватное устройство в раскрытом состоянии (фиг. 3) зевом предохранителя 4 на строповочную г .петлюс и оттягивает фиксатор 7. При этом корпус 1 с крюком 3 под воздействием пружины б разворачивается в рабочее положение (фиг. 1). Применение захватного устройства повышает технику безопасности при подъеме, транспортировке и расстроповке грузов, улучшает условия труда и способствует повышению производительности труда при производстве погрузочно разгрузочных работ, а также позволяет снизить вес захватного устройства, так как несущим элементом в конструкции захватного устройства является только крюк. Формула изобретения Захватное устройство для грузов с моцтажными петлями, содержащее корпус, выполненный из двух щек, между которыми закреплен грузовой крюк, и трос для дистанционного управления захватным устройством, отличающееся тем, что, с целью повышения надежности в работе, оно снабжено шарнирно прикрепленным к корпусу и соединенным с ним пружиной предохранителем, предотвращающим самопроизвольное расцепление крюка от петли, и подпружиненным фиксатором, установленным в корпусе и предотвращеиощим его поворот относительно предохранителя, при этом крюк закреплен неподвижно, в предохранителе выполнено отверстие для подпружиненного фиксатора, а трос прикреплен к корпусу. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 519384, кл. В 66 С 1/10, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1976 |
|
SU607774A2 |
| Двурогий крюк | 1980 |
|
SU903279A1 |
| Захватное устройство | 1978 |
|
SU680974A2 |
| Грузозахватное устройство В.К.Петрова | 1980 |
|
SU950654A1 |
| Штыревое строповочное устройство | 1979 |
|
SU852758A1 |
| ЗАХВАТ ДЛЯ ИЗДЕЛИЙ С ОТВЕРСТИЕМ | 1991 |
|
RU2048419C1 |
| Крюк | 1984 |
|
SU1245538A1 |
| ШТЫРЬЕВОЙ ЗАМОК ГРУЗОЗАХВАТНОГО УСТРОЙСТВА | 1991 |
|
RU2013345C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ РАССТРОПОВКИ ГРУЗА | 2003 |
|
RU2267456C2 |
| МОСТОВОЙ БЛОК МНОГОПРОЛЕТНОГО МОСТА И КАРЕТКА ПРИВОДА (ЕЕ ВАРИАНТЫ) | 1993 |
|
RU2057836C1 |

