(54) СТЕНД ДЛЯ ИСПЫТАНИЙ НЕСУЩИХ СИСТЕМ ТРАНСПОРТНБ1Х МАШИН
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания трансмиссий транспортных средств | 1985 |
|
SU1325314A1 |
| Стенд для испытания трансмиссий транспортных средств | 1985 |
|
SU1326933A1 |
| Стенд для испытания транспортных средств | 1980 |
|
SU1012072A1 |
| Стенд для испытания тракторов | 1979 |
|
SU783623A1 |
| Стенд для испытания транспортных средств | 1989 |
|
SU1679241A1 |
| Стенд для испытания транспортных средств | 1989 |
|
SU1677565A1 |
| Стенд для испытания моторно-трансмиссионных установок транспортных средств | 1985 |
|
SU1296889A1 |
| Стенд для испытания трансмиссий транспортных средств | 1985 |
|
SU1318823A1 |
| Стенд для испытания транспортных средств | 1990 |
|
SU1753328A1 |
| Стенд для испытания транспортных средств | 1981 |
|
SU1004802A1 |
Изобретение относится к транспортному машиностроению и может быть использовано при ресурсных испытаниях несущих систем гусеничных тракторов.
Известен стенд для испытания несущих систем транспортных машин, содержащий основание, удерживающее устройство с ре- 5 гулировочным винтом, тормозную площадку, смонтированную на основании, и клиновые опоры, установленные под неподвижные элементы остова испытываемой машины. Регулирование нагрузки на испытываемую . машину в этом стенде осуществляется регулировочным винтом. Изменением длины винта меняют положение мащины относительно клиновых опор и в конечном итоге положение машины по высоте относительно основания. В результате изменяется сцепной s вес машины, что вызывает изменение нагрузок на узлы испытываемой машины 1.
Недостатком данного стенда является низкая точность воспроизведения эксплуатационных нагрузок, так как в этом стенде не воспроизводится воздействие дорожных 20 неровностей.
Известен также стенд для испытания несущих систем транспортных машин, со-.
держаший раму, опоры и регулируемые подвижные площадки, образующие на раме замкнутый контур, имитирующий дорожные неровности и перемещаемый с помощью привода относительно закрепленной на стенде транспортной машины. В этом стенде для создания реальных условий движения транспортной машины подвижные площадки шарнирно присоединены к стойкам, установленным в трактах гусеничных цепей, перемещаемых при взаимодействии с размещенным на раме копирным механизмом и фиксируемых по высоте с помощью гидропривода с клиновыми парами, состоящими из скощенных поверхностей стоек и размещенных в трактах плунжеров 2.
Недостатком этого стенда является сложность конструкции имитаторов дорожных неровностей и необходимость применения постороннего источника энергии для их привода.
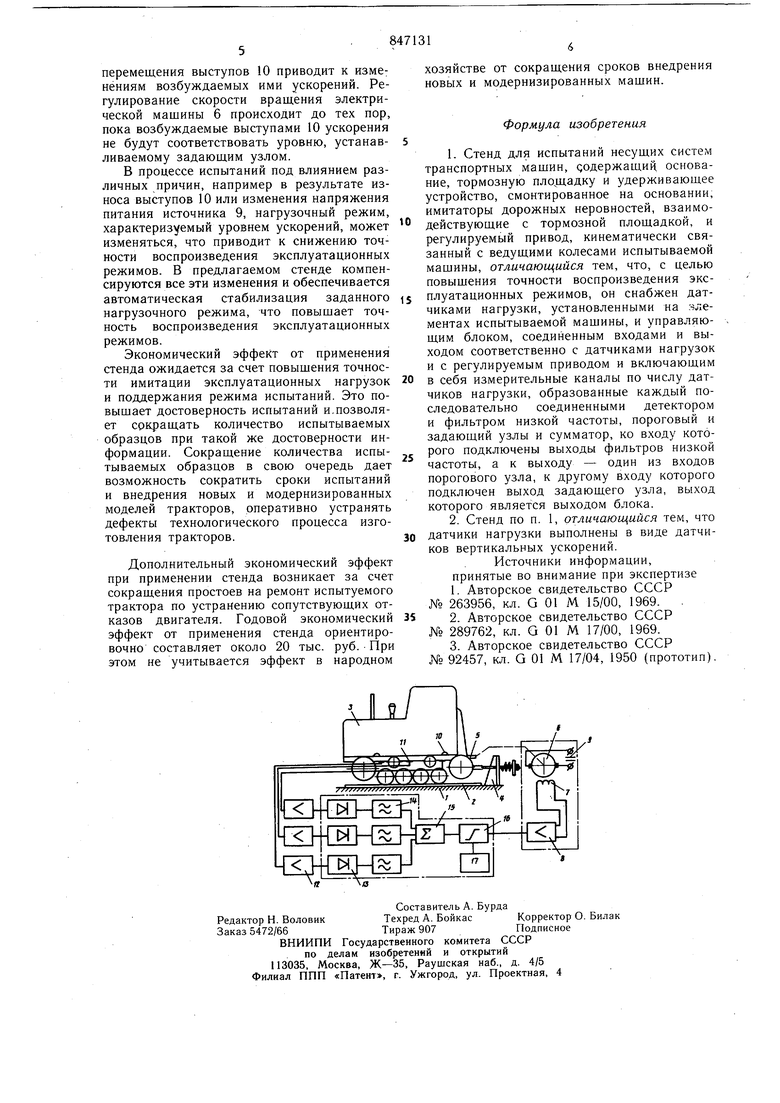
Наиболее близким к изобретению по технической сущности и достигаемому результату является стенд для истыпания несущих систем транспортных мащин, содержащий основание, тормозную площадку и удерживающее устройство, смонтированные на основании имитаторы дорожных неровностей, взаимодействующие с тормозной площадкой, и регулируемый привод, кинематически соединенный с ведущими колесами испытываемой машины 3. Недостатком данного стенда является низкая точность воспроизведения эксплуатационных режимов из-за нестабильности заданного нагрузочного режима. При нарушении заданного нагрузочного режима сказывается невозможность сопоставления между собой результатов испытаний несущих систем различных транспортных мащин, что снижает точность и увеличивает объем испытаний для получения достоверных результатов. Цель изобретения - повыщение точности воспроизведения эксплуатационных режимов. Поставленная цель достигается тем, что стенд снабжен датчиками нагрузки, установленными на элементах испытываемой машины, и управляющим блоком, соединенным входами и выходом соответственно с датчиками нагрузок и с регулируемым приводом и включающим в себя измерительные каналы по числу датчиков нагрузки, образованные каждый последовательно соединенными детектором и фильтром низкой частоты, пороговый и задающий узлы и сумматор, ко входу которого подключены, выходы фильтров низкой частоты, а к выходу - один из входов порогового узла, к другому входу которого подключен выход задающего узла. ВЫХОД которого является выходом блока, Кроме того, датчик нагрузки выполнен в виде датчиков вертикальных ускорений. При таком выполнении стенда обеспечивается автоматическое восстановление заданного нагрузочного режима в случае его нарушения независимо от причин, вызывающих эти нарущения. На чертеже изображена блок-схема стенда. На основании 1 смонтированы тормозная площадка 2 для установки на ней испытываемой транспортной машины 3 и удерживающее устройство 4. С валом 5 отбора мощности испытываемой мащины 3 кинематически связан регулируемый привод, состоящий из электрической машины 6 постоянного тока с обмоткой 7 возбуждения и управляющим усилителем 8 мощности, подключенной к источнику 9 питания. На гусеницах машины закреплены имитаторы дорожных неровностей, выполненные в виде выступа 10 заданной высоты, а на раме испытываемой машины 3 - датчики нагрузки, выполненные в виде датчиков 11 ускорений и усилителей 12. Датчики нагрузки подключены к входам управляюшего блока, включающим в себя измерительные каналы по числу датчиков нагрузки, образованные каждый последовательно соединенными детектором 13 и фильтром 14 низкой частоты. Управляющий блок имеет также последовательно соединенные сумматор 15, входы которого соединены с выходами фильтров низкой частоты 14, и регулируемый пороговый узел 16, один из входов которого подключен к выходу сумматора 15, а другой - к задающему узлу 17. Выход порогового узла 16 является выходом управляюшего блока и подключен к входу управляющего усилителя 8 мощности регулируемого привода. Выход усилителя 8 мощности нагружен на об-мотку 7 возбуждения электрической машины 6 постоянного тока. Величина напряжений в узлах несущей системы зависит от величины ускорений, возбуждаемых с помощью выступов 10. Предварительно задающим узлом 16 устанавливают необходимый уровень срабатывания порогового узла 16. При вращении электрической машины 6 начинают вращаться ведущие колеса испытываемой машины 3, приводя в движение гусеницы с закрепленными на них выступами 10. Последние, взаимодействуя с тормозной площадкой 2, воспроизводят воздействие на машину дорожных неровностей, возбуждая вертикальные ускорения и создавая динамические нагрузки в узлах машины 3. При этом на выходе датчиков 11 ускорений появляется сигнал, поступающий на вход усилителей 12. С выхода усилителей 12 усиленный сигнал поступает на вход детекторов 13, которые выДеляют амплитудное значение сигналов датчиков ускорений 11. Включение детекторов 13 в блок управления обуславливается тем, что сигнал, снимаемый с выхода датчиков 11 ускорений носит колебательный характер. При этом рещающее влияние на нагруженность несущей системы испытуемой машины 3 оказывает именно максимальное значение ускорений, фиксируемое датчиками 11. С выхода детекторов 13 сигнал поступает на вход фильтров 14 низкой частоты, в которых продетектированный сигнал осредняется за определенный промежуток времени, который зависит от постоянной времени фильтра низкой частоты. Сигналы от фильтров 14 поступают на входы сумматора 15, в котором они складываются и поступают на один из входов порогового узла 16, на другой вход которого поступает сигнал от задающего узла 17. Если сигнал, поступающий на вход порогового узла 16 от сумматора 15, отличается от сигнала задающего узла 17, то на выходе порогового узла 16 появляется сигнал, под действием которого управляющий усилитель 8 мощности изменяет напряжение на обмотке 7 возбуждения, вызывая изменение частоты вращения электрической мащины 6. При этом изменяется частота вращения ведущих колес испытываемой мащины 3 и, соответственно, скорость перемещения выступов ш, закрепленных на гусеницах машины. Изменение скорости
