(54) ЭЛЕКТРОПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1987 |
|
SU1515312A1 |
| Устройство для управления электродвигателем постоянного тока | 1978 |
|
SU765959A1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ТИРИСТОРНЫМ УПРАВЛЕНИЕМ | 2004 |
|
RU2260520C1 |
| Устройство для управления тяговым электродвигателем транспортного средства | 1990 |
|
SU1761561A1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2364526C1 |
| Устройство для подачи сварочной проволоки | 1985 |
|
SU1269937A1 |
| Устройство для регулирования скорости электродвигателя постоянного тока | 1978 |
|
SU782106A1 |
| Электропривод гребной установки | 1979 |
|
SU855913A2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА | 1973 |
|
SU382213A1 |
| Способ управления электроприводом постоянного тока и устройство для его осуществления | 1977 |
|
SU705632A1 |
Устройство относится к электротехнике и может быть использовано в элек троприводе с параллельно включенными двигателями независимого возбуждения в частности в крановом электроприводе. . Известен электропривод, содержащий электродвигатели независимого возбуждения с обмотками дополнитель-ных полюсов, регулятор тока возбуждения с обмотками управления и регул рующие резисторы ПЗ . Наиболее близким по технической сущности и достигаемому результату к изобретению является электропривод содержапщй электродвигатели независимого возбуждения с обмотками дополнительных полюсов, регуляторы тока возбуждения Ъ обмотками смещения управления, регулируюпще и выравнива ющий резисторы, причем рдин выйод ов мотки управления каждого рёгуЛятсзр а соединен с общей точкой обмотки якоря электродвигателя и обмоткИ дополнительных полюсов С2 . Недостатки данных электроприводов - сравнительно низкая производительность механизма и недостаточно полное использование электродвигателей по мощности. Цель изобретения - повышение производительности механизма и улучше- ние использования электродвигателей по мощности. Поставленная цель достигается тем, что в электропривод дополнительно введены цепь из.последовательно соединенных контакта направления и контактора, замыкающие контакты которого шунтируют регулирующие резисторы в силовой цепи регулятора тока и в цепи обмотки смещения, два потенциометра и два резистора, причем каждый вывод выравнивающего резистора. ср JOB сводным выводом обмотки управлейия соответствующего регулятора тока и через резистор-соединен с
двилском одного из потенциометров i одни выводы потенциометровподключены к общим точкам обмотки якоря и обмотки дополнительных полюсов, а другие выводы потенциометров объединены и подключены к общей точке обмотки дополнительных полюсов электродвигателей.
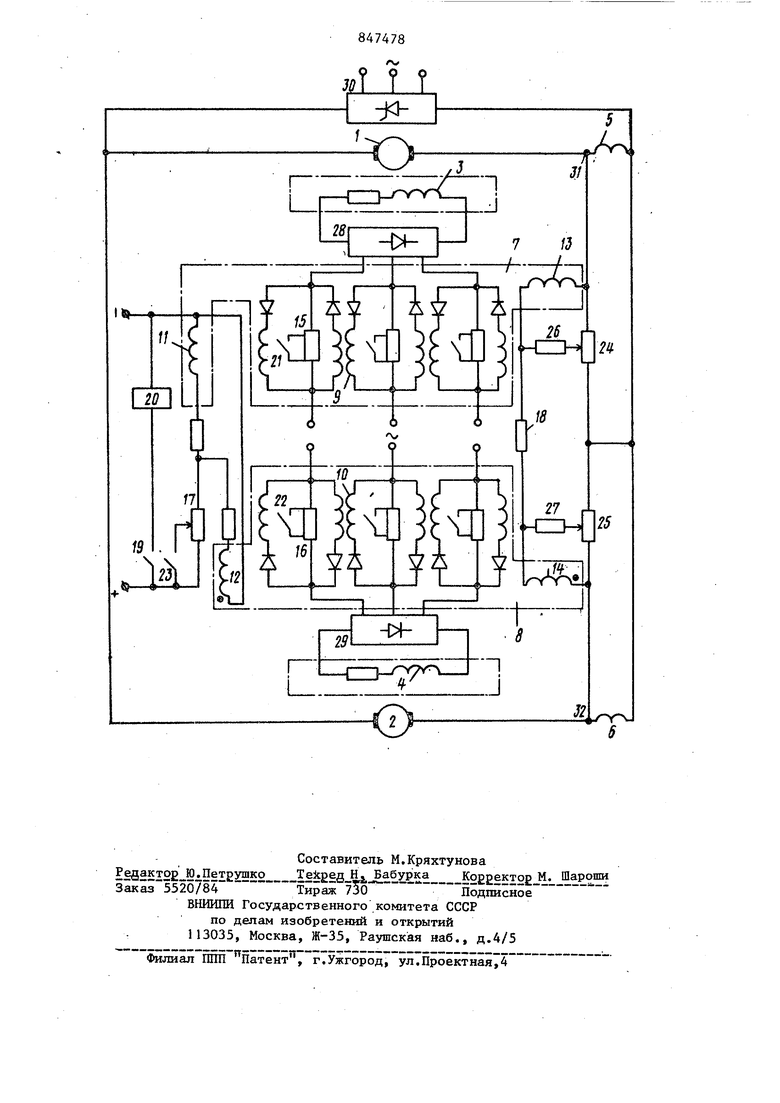
На чертеже изображена электрическа схема предлагаемого электропривода,
Электропривод содержит электродвигатели 1 и 2 с обмотками 3 и 4 йезависимого возбуждения и обмотками 5 и 6 дополнительных полюсов. Регуляторы 7 и 8 тока возбх5ОДения выполнены в виде магнитных усилителей с рабочими обмотками 9 и 10, обмотка.ми 11 и 12 смещения и обмотками 13 и 14 управления. Регулирующие резисторы ). 5 и 16 включены параллельно рабочим обмоткам 9 и 10 магнитных усилителей, а регулирующий резистор 17 включен последовательно с обмотками 11 и 12 смещения магнитных усилителей. Выравнивающий резистор 18 подключен между выводами обмоток 13 и 14 управления, второй вывод которых подключен к общей точке обмотки якоря соответствующего электродвигателя 1 или 2 и обмотка. 5 или 6 дополнительных полюсов. Контакт 19 направления соединен последовательно с контактором 20, замыкающие контакты 21 и 22 которого шунтируют часть регулировочных резисторов 15 и 16у а замыкающий контакт 23 контактора 20 шунтирует часть регулирующего резистора 17. Одни выводы потенциометров 24 и 25 подключены кобщим точкам обмотки якоря соответствующего двигателя 1 или 2 и обмотки 5 или 6 дополнительных полюсов, другие выводы потенциометров 24 и 25 объединены и подключены к общей точке обмоток 5 и 6 дополнительных полюсов, а движки потенциометров 24 и 25 через резисторы 26 и 27 соединены с соответствующим выводом выравнивающего резистора 18. Рабочие обмотки 9 и 10 магнитных усилителей соединены с обмотками 3 и 4 независимого возбуждения через выпрямительные мосты 28 и 29. В качестве .источника питания электродвигателей 1 и 2 может быть использован нереверсивный тиристорный агрегат 30
Электропривод работает следующим образом.
Работа электропривода поясняется ча примеремеханизма подъема крана.
привод которого питается от нереверсивного тиристорного агрегата 30. В режиме подъема груза агрегат 30 работает в выпрямительном режиме. При одинаковых токах электродвигателей 1 и 2 точки 31 и 32 схемы эквипотенциальны, поэтому уравнительный ток по цепи обмотки 13, резистор 18, обмотка 14 не протекает. При разбаланс токов электродвигателей 1 и 2 потенциалы точек 31 и 32 отличаются друг от друга и по цепи обмотка 13, резистор 18, обмотка 14 протекает уравнительный ток, при этом усиливается поле более нагруженного электродвигателя и ослабляется поле менее нагруженного электродвигателя, что приводит к выравниванию токов электродвигателей 1 и 2. Поскольку обмотки 13 и 14 магнитных усилителей подключены к Потенциометрам 24 и 25, включенным Параллельно обмоткам 5 и 6 дополнительных полюсов, то через обиотки 13 и 14 протекает ток, пропорциональный току соответствующего электродвигателя 1 и 2, что в результате позволяет изменять поток и частту вращения электродвигателей 1 и 2 в зависимости от тока якорей электродвигателей, при этом электродвигатели работают в режиме мощности.
При спуске груза агрегат 30 работает в инверторном режиме, а электродвигатели 1 и 2 в генераторном режиме. Для устойчивой работы электропривода в этом режиме возбуждение двигателей устанавливается постоянным, что достигается замыканием контакта 19 направления контактора 20 и шунтированием его контактами 2123 резисторов 15-17, при этом увеличивается ток в обмотках 11 и 12 смещения магнитного усилителя, магнитный усилитель закрывается, а ток в обмотках 3 и 4 возбуждения определяется только сопротивлением части резисторов 15 и 16. Выравнивание токов электродвигателей ij и 2 в этом режиме происходит за счет ослабления поля более нагруженного электродвигателя за счет реакции якоря и усления поля менее нагруженного двигателя за счет уменьшения действия реакции якоря. При этом абсолютная величина токов электродвигателей при работе в четвертом квадранте электромеханической характеристики (при спуске груз) из-за КПД механизма принципиально меньше токов электродвигателей при работе в первом квадранте (при подъеме груза). Электропривод за счет выравнивания токов электродвигателей и зависимой от нагрузки частоты вращения позволяет повысить производительност механизма и улучшить использование электродвигателей по мощности. Формула изобретения Электропривод, содержащий электро двигатели независимого возбуждения с обмотками дополнительных полюсов, ре гуляторы тока возбуждения с обмотками смещения и управления, регулирующие и выравнивающий резисторы, приче один вывод обмотки управления каждог регулятора соединен с общей точкой . обмотки якоря электродвигателя и обмотки дополнительных полюсов, отл чающийся, тем, что, с целью повышения производительности механизм и улучшения использования электродви гателей по мощности, в .него дополнительно введены цепь из последовательно соединенных контакта направления и контактора, замыкающие контакты которого шунтируют регулирующие резисторы в силовой цепи регулятора тока и в цепи обмотки смещения, два потенциометра и два резистора, причем каждый вывод выравнивающего резистора соединен со свободным выводом обмотки управления соответствующего регулятора тока и через резистор соединен с движком одного из потенциометров, одни выводы потенциометров подключены к общим точкам обмотки якоря и обмотки дополнительных полюсов, а другие выводы потенциометров объединены и подключены к общей точке обмоток дополнительных полюсов электродвигателей. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 184325, кл. Н 02 Р 5/50, 17.06.64. 2.Авторское свидетельство СССР № 601795, кл. Н 02 Р 5/46, 17.04.72 (прототип). jj Т
