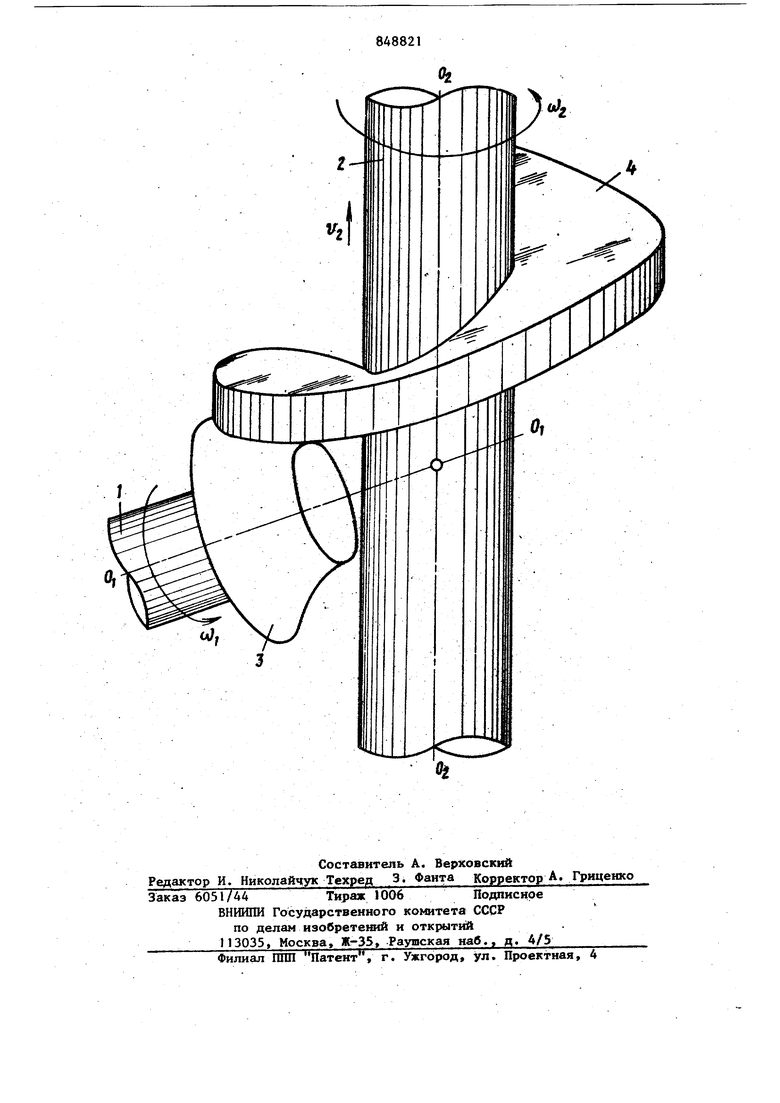
н&кж)на образующей гиперболоида.к его оси сА и радиусом горлового сечения G, определяемыми зависимостями arcЧ(u,V Гv RlCчV) где Ujn передаточное отношение Р- -параметр винтового движения ведомого звена, активная поверхность ведомого звена выполнена в виде прямого конволютного геликоида с радиусом основного цилиндра, равным радиусу горлового сечения гиперболоида, а межосевой угол механизма равен арксекансу пер«даточного отношения. На чертеже приведена схема предлагаемого механизма. Фрикционный механизм содержит ведущее звено 1 с неподвижной ось вращения 0 0 и ведомое звено 2 с неподвижной осью 0 0,д. Активная повер ность звена 1 вьтолнена в виде прямо го конволютного геликоида 4, образую щая которого совпадает с образующей .гиперболоида 3, причем гиперболоид З и прямой конволютный геликоид 4 ка саются по этой образующей. При работе механизма вращение ведущего звена 1 вокруг неподвижной оси 0 0 с постоянной угловой скоростью и; преобразуется во вращательное и поступательное движения ведомо го звена 2 вокруг и вдоль оси Од О,, с постоянными скоростями ш„к М. Таким образом, применение предлаг емой конструкции позволяет повысить долговечность и КПД фрикционного механизма винтовой передачи вследствие исключения трения скольжения между активными поверхностями звеньев. Дол говечность повышается за счет уменьшения износа активных поверхностей, а КПД - вследствие уменьшения потерь 1 энергии на трение в зоне контакта этих поверхностей. Формула изобретения Фрикционный механизм с неортогональными пересекающимися осями, содержащий ведущее звено, вращающееся вокруг Неподвижной оси, и ведомое звено, совершающее винтовое движение вокруг и вдоль своей неподвижной оси, о тли чающийся тем, что, с целью повьш1ения долговечности и КПД путем исключения скольжения активных поверхностей звеньев друг относительно друга, активная поверхность ведущего .звена выполнена в виде участка гиперболоида вращения, отстоящегЬ от его гор лового сечения на расстоянии, большем радиуса этого сечения, с углом наклона образующей гиперболоида к его оси с и радиусом горлового сечения а, определяемыми зависимостями c.arctg(,)-0.5jc,.p,(ui.,-0.5-, где передаточное отношение; Р. - параметр винтового движения ведомого звена, активная поверхность ведомого звена выполнена в виде прямого конволютного геликоида с радиусом основного цилиндра , равным радиусу горлового сечения гиперболоида, а межосевой угол механизма равен арксекансу передаточного отношения. Источники информации, принятые во внимание при экспертизе 1.Артоболевский И.И. Механизмы в современной технике. М., Наука, 1975, Т.1У, с. 288. 2.Там же, с. 290 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Зубчатая передача с неортогональными пересекающимися осями | 1981 |
|
SU953303A1 |
| Зубчатая передача со скрещивающимися под прямым углом осями колес | 1973 |
|
SU533778A1 |
| ШКИВ | 2002 |
|
RU2224936C1 |
| ФРИКЦИОННЫЙ РЕВЕРСИВНЫЙ ВАРИАТОР | 1995 |
|
RU2112900C1 |
| МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2008 |
|
RU2364775C1 |
| УГЛОВАЯ ЗУБЧАТАЯ МУФТА ДЛЯ ПОДВИЖНЫХ ВАЛОВ | 2009 |
|
RU2418211C1 |
| МЕХАНИЗМ БЕССТУПЕНЧАТОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПЕРЕДАТОЧНОГО ОТНОШЕНИЯ | 1991 |
|
RU2012833C1 |
| МЕХАНИЗМ БЛОКИРОВКИ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 1995 |
|
RU2091249C1 |
| УСТРОЙСТВО БЕССТУПЕНЧАТОГО ВАРИАТОРА С ПРИВОДОМ ВЕДУЩЕГО ЗВЕНА ЧЕРЕЗ РЫЧАГИ И ИЗМЕНЯЕМУЮ ТОЧКУ ПРИЛОЖЕНИЯ ВНЕШНИХ СИЛ ВРАЩЕНИЯ | 2013 |
|
RU2578797C2 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2620278C2 |