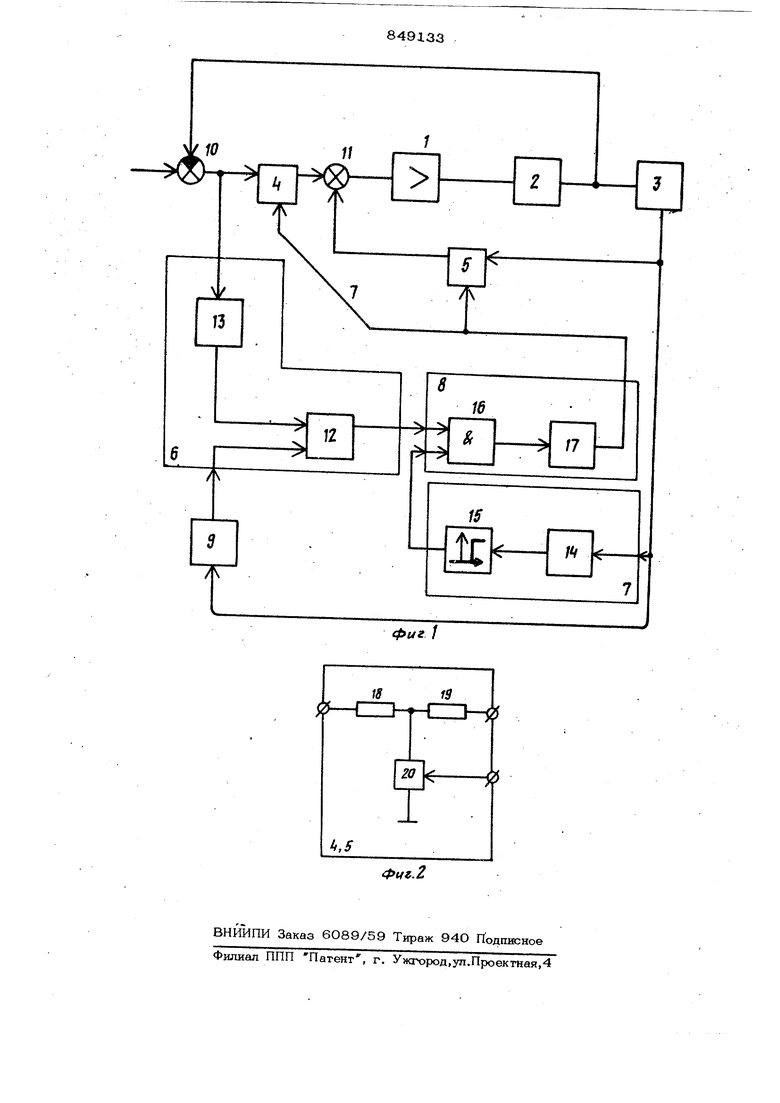
Изобретение относится к системам управления движущимися объектами и. может найти применение в 1фнводах систем нмеюошх ограниченную рабочую зону, например в системах управления летательными аппаратами (в автопилотах) и сио темах утфавления морскими и речными судами (в авторулевых). Известны следяише системы, содержащие последовательно соединенные первый сумматор, второй сумматор и испогаштвль ный двигатель, выход, которого соединен с одним из входов первого сумматора и через последовательно соединенные тахо- генератор и коммутатор - со вторым входом второго сумматора, выход первого сумматора через последовательно соедннао ные пороговое устройство и формирователь импульсов соединен с управляющим входом коммутатора, причем пороговое устройство состоит из выпрямителя (т.е. блока вььделевия модуля ), источника оперного в пряжения и компаратора, а коммутатор представляет собой резисторный делитель через ключ, соединенный с нулевой шиной системы l и 2. Известны также следящие системы, содержащие последовательно соединенные первый сумматор, гфедварительнь1й усилитель, первый коммутатор, второй сумматор, усилитель мсчцности и исполнительный двигатель, выход которого соединен с одним из входов первого сумматора и через последовательно соединенные тахогенератор и второй коммутатор - со вто. рым входом второго сумматора, а выходы исполнительного двигателя и предв ительного усилителя через пороговое устройство соединен со входами схемы совпадения, выход которой через схему сопряжения (например, фильтр типа RC-цепочкн) соединен с управляющими входами коммут торов з2 и 4. По основному авт. св. № 61989.7, иавесша следящая система, содержащая последовательно соединенные первый сумматор, первый коммут)атор, второй , усилитель и исполнительный , тель, выход которого через последовательно соедине1шые тахогенератор и второй коммутатор соедине) со вторым входом второго сумматора, а выход первого сум--матора - с первым входом первого пфого вого устройства, второй вход которого соединен с выходом источника опорного налряжашя, а выход - с первым входом формирователя импульсов, второй вход которого через второе пороговое устройство соединен с выходом тахогенератора, а выход - с управляющими входами комму таторов s. . Основным недостатком известной системы является ее низкая надежность иэза наличияскачкообразного переключения коммутаторов на границе рабочей зоны, что сужает область ее применения. Цель изобретения - повышение надежное ти системьи. Поставленная цель достигается тем, что в следящей системе, формирователь импульсов содержит последовательно соединенные элемент совпадения и элемент задержки, выход которого соединен с выходом формирователя импульсов, входами подключенного ко входам логического элемента совпадения. На фиг. 1 1федставлена блок-схема системы; на фиг. 2 - одна из возможных схем построения коммутаторов. Система содержит усилитель 1, исполнительный двигатель 2, тахогенератор 3, первый 4 и второй 5 коммутаторы, первое 6 и второе 7 пороговое устройство, формирователь 8 импульсов, источник опорного напряжения, первый 10 и второ 11 сумматоры. Первое пороговое устройство 6 анализ рует величину сигнала рассогласования и состоит из компаратора 12 и элемента 13 вьщеления м одуля который формирует на своем выходе сигнал логической едини цы, в том. случае, когда сигнал paccoiNласования по величине превышает величину опорного напряжения, задаваемую в источнике 9 опорного напряжения. Таким образом, первое пороговое устройство представляет собой устройство с перемен ным порогом срабатывания,которыйзавис от величины выходного напряжения источ ника 9. Источник 9 опорного напряжения мооке быть автономного и не автономного испо нения. В первом случае необходимо отклю чить подачу сигналов на его утфавляющи вход. Второе пороговое устройство анализирует величину сигнала с тахогенератора 3 и состоит из элемента 14 вьщеления модуля и однополярного реле. Формирователь 8 импульсов, состоит из логического элемента 16 совпадения и элемента 17 задержки. В качестве элемента 17 задержки может применяться любой из известных элементов задержки, например, в простейшем случае это может быть интегр1фующая или апериодическая цепочка. В простейшем виде коммутаторы 4 и 5 могут быть реализованы с помощью резисторов 18 и 19 и ключа 20. Система работает следуюпшм образом. В зоне рабочих углов сигнал задания поступает на первый вход сумматора 10,. на второй вход которого поступает сигнал обратной связи с выхода исполнительного двигателя 2. Сигнал рассогласования с выхода сумматора 10 через первый коммутатор 4, второй сумматор 11 и усилитель 1 поступает на вход исполнительного двигателя ., 2, который воздействуя на объект регулирования, изменяет регулируемую координату. Для стабилизации работы системы сигнал с выхода тахогенератора 3 через коммутатор 5 подается на вход второго сумматора 11. Кроме того, сигнал рассогласования с выхода сумматора 10 подается на первый вход порогового устройства 6, на второй вход которого подается сигнал с выхода источника 9 опорного напряжения. Рассмотрим работу системы с автономным источником 9 опорного напряжения , т.е. когда на его управляющий вход не подаются никакие сигналы. В пороговом устройстве 6 сигнал рассогласования через элемент 13 вьщеления модуля подается на первый вход компаратора 12, на второй вход которого издается опорное напряжение. Увеличение сигнала рассогласования на выходе сумматора 10 сверх установленного источником 9 опорного нащэяжения уровня вызывает появление сигнала логи&ческой единицы на выходе компаратора 12, а следовательно, .на выходе порогового устройства 6, на первом входе формирователя 8 импульсов и на первом входе элемента 16 совпадения. Если под действием имеющего места в системе сигнала рассогласования вал двигателя 2 вращается с любой малой скоростью, то сигнал с выхода тахоген&ратора 3 подается на вход второго порогового устройства 7. В пороговом устройстве 7 из выходного сигнала тахогенера- тора 3 выделяется сигнал, пропорцяональгный его абсолютной величине, с помощью элемента 14 Ььщеления модуляи подается на ЁХОД однополярного реле 15. Если абсолютная величина скорости вращения двигателя. 2 больще уровня срабатывания реле 15, то на его выходе и, сравнитель- ю Но, на выходе Второго порогового устройства 7, на втором входе формирователя 8 импульсов и втором входе элемента 16 совпадения формируется сигнал логического нул51. В этом случае на выходе элемента 16 совпадения формируется сигнал логического нуля, ключ 2О разомкнут и система работает в своем обычном режиме. На границе рабочей зоны системы вращению вала двигателя 2 препятствует , механический упор, в результате чего сигнал с тахосенератора 3 отсутствует и на второй вход элемента 16 совпадения подается сигнал Логической единицы с выхода порогового устройства 7. При дости- S жении сигналом рассогласования заданного источником 6 опорного напряжения уровня на другчзй вход .элемента 16 совпадения подается сигнал ;1огической единиць с первого порогового устройства ё. При наличии на обоих входах элемента 16 совпадения сигнала логической единицы он срабатывает и вьщает управляющее напряжение через элемент 17 запаздывания на вход транзисторного ключа 20. В этом режиме ключ 2О открывается и шун тирует вход усилителя 1, в результате чего следящая система отключается от сигнала задания, Величина опорного напряжения источни ка 9 устанавливается исходя из максимал но возможной статической (мсментной) ошибки следящей системы. Постоянная времени элемента 17 запаздывания, реализованного в виде интегрирующей ЯС-цепочки 11, выбирается .в два - три раза больше постоянной времени двигателя 2, с целью иск/вочешга
срабатывания транзисторного ключа 2 О 11ри резких реверсах системах в нелинейной области его работьи
Если на входы элемента 16 совпадения с выходов пороговых устройств 6 и 7 подаются сигналы логической единицы, то на зго выходе тоже формируется логической единицы.
Использование изобретения позволяет повысить надежность следящей системы на границе рабочей зоны, кроме того. она - обладает универсальностью, по предлагаемой структурной схеме может быть вьшолнен любой следящий привод, требующий отключения на рабочей зоны, работающий как на постоянном, так и на переменном токе. Кроме того, в некоторых практических применениях не допускается работа следящего Щ)ивода в пределах рабочей зоны с увеличенной статической (моментной) ощибкой, превышающей установ шнную и имеющей место из-за существенных изменений характеристик механических передач. В этих случаях требуется отключение системы не только на границе рабочей зоны, но и в любой точке на ее протяжении. Формула изобретения 1. Следящая система по авт. св. Ng б19897,о тличающаяся тем, что, с целью повышения надежности системы, в ней формирователь импульса содержит последовательно соединенные элемент совпадения и элемент задержки, выход которого соединен с выходом форм№рователя импульсов, входами подключенного к Входам элемента совпадения. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР N9 482716, кл. GO5 В И/О1, 1973. 2.Авторское свидетельство СССР № 611177, кл. U05 В 11/О1, 1976. 3.Авторское сввдетельсгво СССР N9 574699, кл. G05 В 11/14, 1974. 4.Авторское свидетельство СССР по заявке № 2602272/18-24, кл. GO5 В 11/01, 1978. 5.Авторское свидетельство СССР № 619 897, кл. G О5 В 11/О1, 1976 (прототип).


| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1977 |
|
SU734610A1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| Следящая система | 1978 |
|
SU746406A1 |
| Следящая система | 1976 |
|
SU611177A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| Многоканальный преобразователь код-угол | 1973 |
|
SU486344A1 |
| Следящее устройство | 1976 |
|
SU619897A1 |
| Следящая система | 1977 |
|
SU661501A1 |
| Многоканальный преобразователь код-угол | 1975 |
|
SU526935A1 |
| Устройство для управления антенной корабельной радиолокационной станции по курсовому углу | 1974 |
|
SU1841193A1 |