1
Предлагаемое изобретение относится к области систем управления, в частности, к следящим системам с тахометрической. обратной связью.
Известны следящие сис-темы с тахометрической. обратной связью, содержащие последовательно соединенные измеритель рассогласования, . блок сравнения, усилитель и исполнительный механизм, имеющий общий вал с тахогенератором, выход которого через переключатель подключен ко второму входу блока сравнения, а выход измерения рассогласования через пороговое устройство и формирователь импульсов соединен с управляющим входом переключателя .
Недостатком известных систем является то, что в них включение форсированного торможения происходит вне зависимости.от энергетических соотношений в системе, которые, могут сильно меняться при изменении внешних условий и параметров системы, обусловленных наличием помех и технологическими допусками.
Из известных систем наиболее близкой по технической сущности является следящая система, содержащая последовательно
соединенные измеритель рассогласования, выход которого подключен к выпрямителю, первый переключатель, второй переключатель, первый сумматор, усилитель и исполнительный .м, выход которого непосредственно соедини с одним из входов из- мерителя рассогласования и через тахогенератор, третий и четвертый переключатели подключены ко второму входу первого сумматора, источник опорного Напр5 жения, выходы которого соединены с первыми входами соответственно второго и третьего сумматоров, выходы которых подключены ко входам соответственно первого и второго ключей, управляющие входы которых подключены к выходам соответственно первого и второго формирователей импульсой, а выход-.
5 через третий формирователь импульсов подключен к управляющим входам первого и четвертого переключателей, а через четвертый формирователь импульсов к управляющим входам второго и третьего переключателей 3}.
Недостатком известной системы является низкое бь1стродействие.
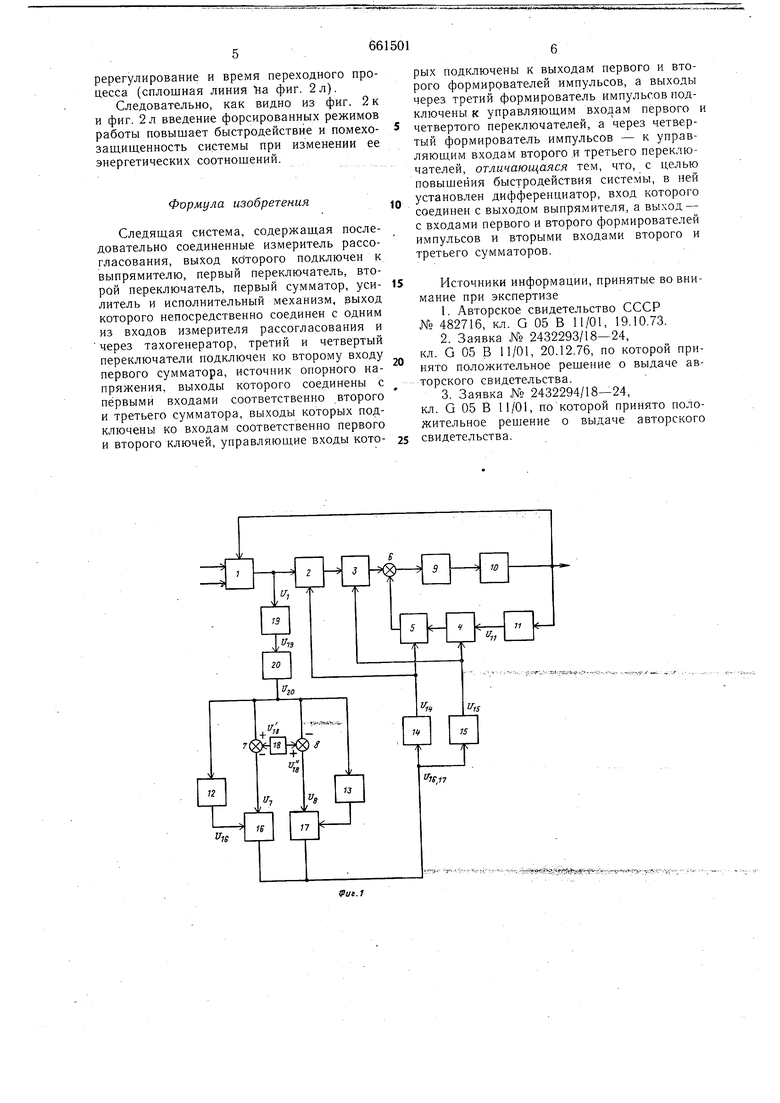
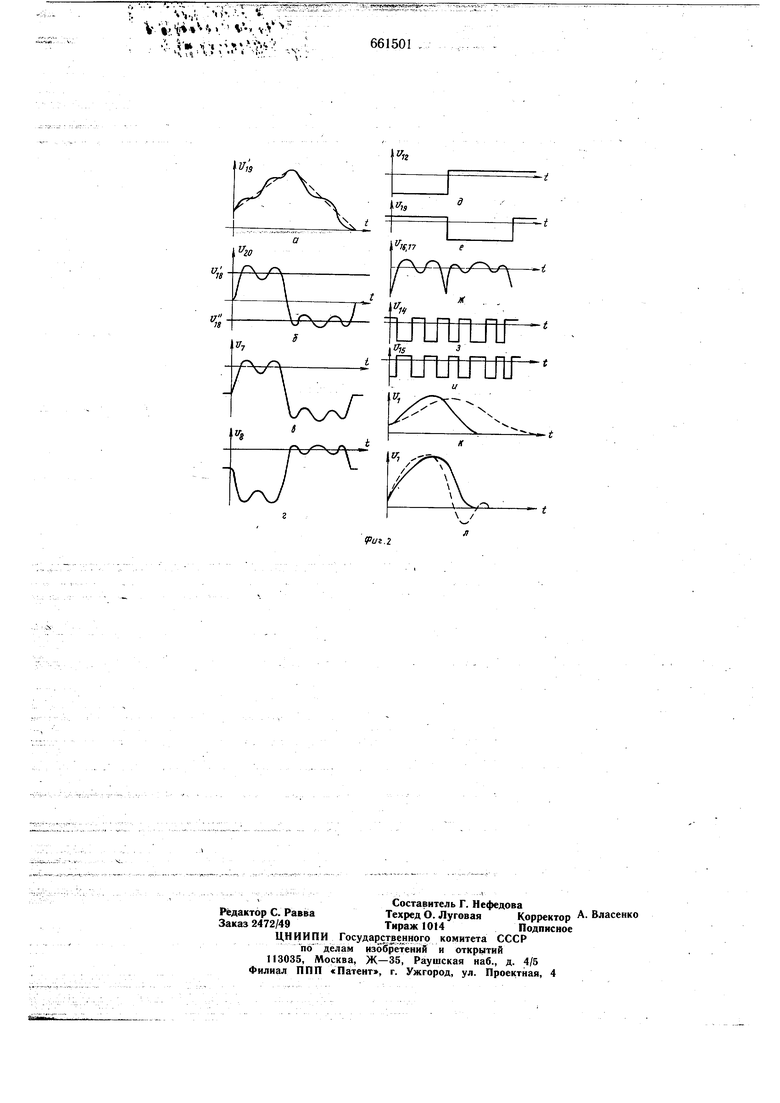
Целью настоящего изобретения является повышение быстродействия. Поставленная цель достигается тем, что в системе установлен дифференциатор, вход которого соединен с выходом выпрямителя, а выход с входами первого и второго формирователей импульсов и вторыми входами второго и третьего сумматоров. и,,.-, Блок-схема системы представлена на фиг. 1; на фиг. 2 представлены эпюры напряжений. Система, содержит измеритель рассогласования 1, первый, второй, третий и четвертый переключатели 2 3, 4, 5, первый, второй, третий сумм,аторы 6, 7, 8, усилитель 9, исполнительный механизм 10, тахогенератор 11, первый, второй, третий и четвертый формирователи импульсов 12,13 14, 15, первый и второй ключи 16, 17, источник опорного напряжения 18, выпрямитель 19, дифференциатор 20, Uj выходное напряжение i-ro блока. Система работает следующим образом. - -При появлении на выходе измерителя рассогласования I Uj сигнала рассогласования сигнал с выхода выпрямителя 19 Ui9 на фиг. 2а - сплошная линия) дифференцируется. Сигнал Via с выхода дифференциатора 20 (фиг. 2 б), пропорциональный производной сигнала с выхода выпрямителя 19, суммируется с постоянным по величине опорным напряжением Ujj в сумматоре 7 (фиг. 2 в) и с постоянным по величине опорным напряжением U-fg в сумматоре 8 и инвертируется в нем (фиг. 2 г). Формирователь импульсов 12 через ключ 16 подключает выход сумматора 7 ко входам формирователей импульсод 14, 15 при положительной производной выходного сигнала выпрямителя 19 (фиг. 2д). При отрицательной производной выходного сигнала выпрямителя 19 формирователь -импульсов 13 через ключ 17 подключает выход сумматора 8 ко входам формирователя импульсов 14, 15 (фиг. 2е). Таким образом, на формирователей импульсов 14, 15 поступает управляющий сигнал Ufgir (фиг. 2 ж), пропорциональный отклонению сигнала Uto от постоянного LJje на участке возрастания U( и пропорциональный отклонению сигнала от Uto постоянного сигнала Ui3 на участке убывания Ui. Сигнал Ufejif пропорционален отклонению сгибающей . выпрямленного сигнала рассогласования от эталона, изображенного на фиг. 2 а пунктиром, производная которого пропорциональна U а на участке убывания, и пропорционален отклонению огибающей выпрямленного сигнала рассогласования от эталона, изображенного на фиг. 2 а пунктиром, производная которого пропорциональ ная U(8 на участке возрастания Uj и пропорциональна Dig на участке убывания Ui. При сигнале Uie,i7 положительной полярности формирователь импульсов 14 подает управляющий сигнал на переключатели 2 и 5, которые,переключая коэффициенты усиления в прямой и обратной связях системы, осуществляют уменьщение уровня сигнала рассогласования Ui относительно уровня сигнала тахогенератора что вызывает форсированное торможение исполнительного механизма 10 при отработке сигнала рассогласования. При сигнале итб,7 отрицательной полярности формирователь импульсов 15 подает управляющий сигнал на переключатели 3 и 4, которые, переключая коэффициенты усиления в прямой и обратНой связи системы осуществляют увеличение уровня сигнала рассогласования U, относительно уровня сигнала тахогенератора, чтовызывает форсированное ускорение исполнительного механизма 10 при отработке сигнала рассогласования. Таким образом, при отработке сигнала рассогласования в системе формируется управляющий сигнал UiE,j7 вызывающий форсированное торможение и форсированное ускорение исполнительного механизма 10. Благодаря этому, предлагаемая следящая система стремится приблизить кривую переходного процесса к эталону, изображенному на фиг. 2 а, пунктиром. При увеличении наклона огибающей сигнала рассогласования сигнал с выхода дифференциатора 20 становится по, величине больше эталонного напряжения Ujj или формирователь импульсов 14 включает режим форсированного торможения, что приводит к резкому уменьшению наклона огибающей сигнала рассогласования. И, наоборот, при уменьшении наклона огибающей сигнала рассогласования сигнал с выхода дифференциатора 20 становится по величине меньше эталонного напряжения Uie иди Uie и формирователь импульсов 15 включает режим форсированного ускорения, что приводит к резкому увеличению наклона огибающей сигнала рассогласования. С другой стороны указанные функциональные блоки позволяют уменьшить затягивание переходного процесса при увеличении демпфирования следящей системы от изменения внешних условий, наличия помех и технологического разброса параметров, так как в этом случае исполнительное устройство большую часть времени работает Б режиме форсированного ускорения. На фиг. 2 к пунктиром показана кривая переходного процесса в системе без применения формированных режимов, здесь же сплощной линией показана кривая переходного процесса в системе с применением форсированных режимов. По тем же причинам из-за уменьшения демпфирования в системе увеличивается перерегулирование и время переходного процесса (на фиг. 2л пунктиром показана огибающая сигнала рассогласования без применения форсированн к режимов). Наличие форсированных режимов в предлагаемой системе, а именно, режима форсированного торможения, уменьшает перерегулирование и время переходного процесса (сплошная линия на фиг. 2л). Следовательно, как видно из фиг. 2 к и фиг. 2 л введение форсированных режимов работы повышает быстродействие и помехозаш,иш,енность системы при изменении ее энергетических соотношений. Формула изобретения Следяшая система, содержаш,ая последовательно соединенные измеритель рассогласования, выход которого подключен к выпрямителю, первый переключатель, второй переключатель, первый сумматор, усилитель и исполнительный механизм, выход которого непосредственно соединен с одним из входов измерителя рассогласования и через тахогенератор, третий и четвертый переключатели подключен ко второму входу первого сумматора, источник опорного напряжения, выходы которого соединены с первыми входами соответственно второго и третьего сумматора, выходы которых подключены ко входам соответственно первого и второго ключей, управляюш,ие входы которых подключены к выходам первого и второго формирователей импульсов, а выходы через третий формирователь импульсов подключены к управляюш,им входам первого и четвертого переключателей, а через четвертый формирователь импульсов - к управляюш,им входам второго я третьего переключателей, отличающаяся тем, что, с целью повышения быстродействия системы, в ней установлен дифференциатор, вход которого соединен с выходом выпрямителя, а выход - с входами первого и второго формирователей импульсов и вторыми входами второго и третьего сумматоров. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 482716, кл. G 05 В 11/01, 19.10.73. 2.Заявка № 2432293/18-24, кл. G 05 В 11/01, 20.12.76, по которой принято положительное решение о выдаче авторского свидетельства. 3.Заявка № 2432294/18-24, кл. G 05 В 11/01, по которой принято положительное решение о выдаче авторского свидетельства.

| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1976 |
|
SU611177A1 |
| Следящее устройство | 1976 |
|
SU619897A1 |
| Следящая система | 1978 |
|
SU711538A1 |
| Следящая система | 1975 |
|
SU742871A1 |
| Следящая система | 1978 |
|
SU746405A1 |
| СЛЕДЯЩАЯ СИСТЕМА С ЦИФРОВЫМ ОТСЧЕТОМ | 1972 |
|
SU419730A1 |
| Следящая система | 1973 |
|
SU482716A1 |
| Следящая система | 1979 |
|
SU847275A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2143719C1 |
:- : . --....,- чj.-... -... ,....-. ;-, V .. v .
. . vvj.
661501
ГУ / о,
1% 3
ПШЮПГ
