(54) СЛЕДЯЩАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1983 |
|
SU1166056A2 |
| Следящая система | 1977 |
|
SU734610A1 |
| Следящая система | 1982 |
|
SU1109711A1 |
| Следящий привод наведения | 2024 |
|
RU2835471C1 |
| Следящая система | 1979 |
|
SU849133A2 |
| Следящая система | 1977 |
|
SU673979A1 |
| Следящая система | 1981 |
|
SU1001008A1 |
| Следящая система | 1978 |
|
SU711538A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1978 |
|
SU1840029A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
.1 .
Изобретение относится к следящим системам широкого профиля и может быть использовано для ограничения угла поворота выходного вала систем с автоматического регулирования.
Известна следящая система, содержащая последовательно соединенные измеритель рассогласования, сумматор, усилитель и исполнительный 10 механизм, выход которого соединен со входом измерителя рассогласования и через тахогенератор и переключающее устройство со входом сумматора, выход измерителя рассогла-15 сования через пороговое устройство и согласующее устройство соединен с управляющим входом переключателя из.
Известна следящая система, содер- 20 жгицая последовательно соединенные измеритель рассогласования, первый усилитель, первый ключ, второй усилитель, исполнительный двигатель и редуктор, выход которого через 25 тахогенератор и второй ключ соединен со входом второго усилителя, а через датчик угла- с одним из входов измерителя рассогласования, и первым входом -корректирующего уст- ЗО
ройства, второй вход которого соединен с выходом первого усилителя, а выход - с управляющими входами ключей, причем нелинейное корректирующее устройство содержит последовательно соединенные сумматор, выпрямитель, фильтр и пороговое устройство .
Повышение точности таких систем может быть достигнуто за счет нелинейного корректирующего устройства, содержащего пороговые устройства и логический блок СЗ,
Наиболее близкой к предлагаемой является следящая система, содержащая последовательно соединенные измеритель рассогласования, первый усилитель, первый ключ, второй усилитель и исполнительный двигатель, выход которого через последовательно соединенные тахогенератор и второй ключ соединен со входом второго усилителя, а через последовательно соединенные редуктор и датчик угла - с одним из входов измерителя рассогласования j и логический блок, первый вход которого соединен с выходом первого усилителя, второй вход - с выходом порогового устройства, а выХОД - и упЁ авляющим входом первого ключа 4 .
Недостатком известной системы явлется ее низкая точность.
Цель изобретения - повышение точности системы.
Поставленная цель достигается тем, что в системе вход порогового устройства соединен с выходом датчика угла, а управляющий вход второго ключа соединен с выходом логического блока.. .
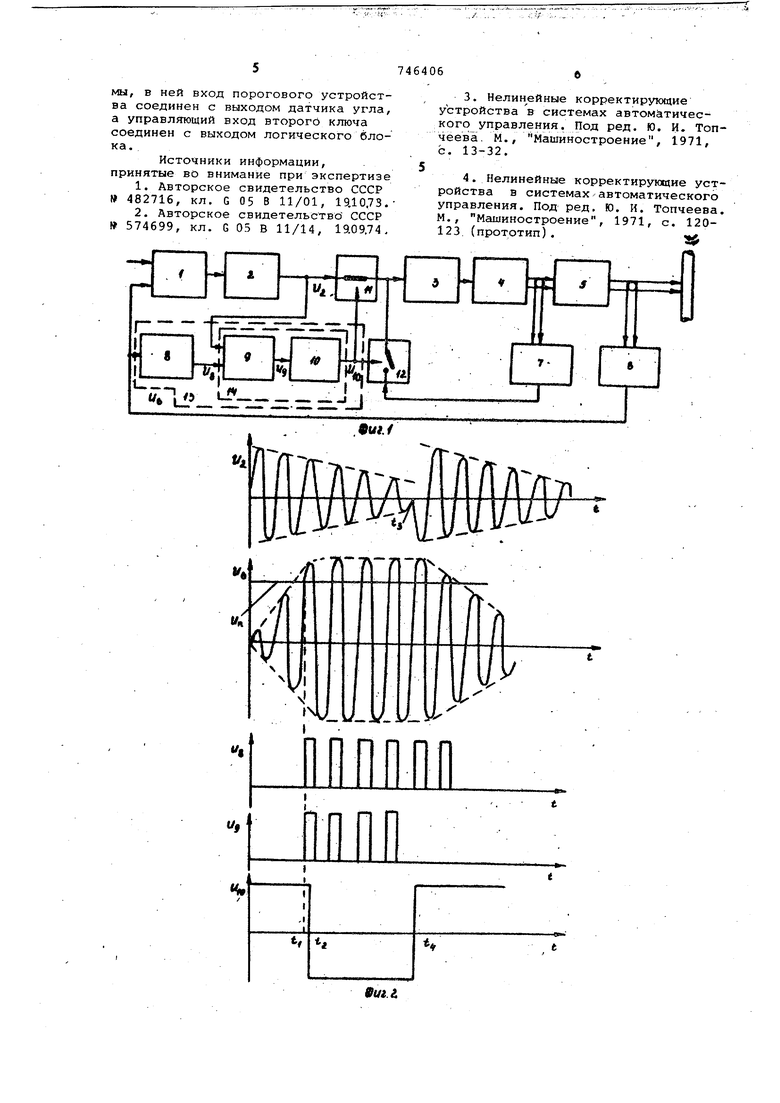
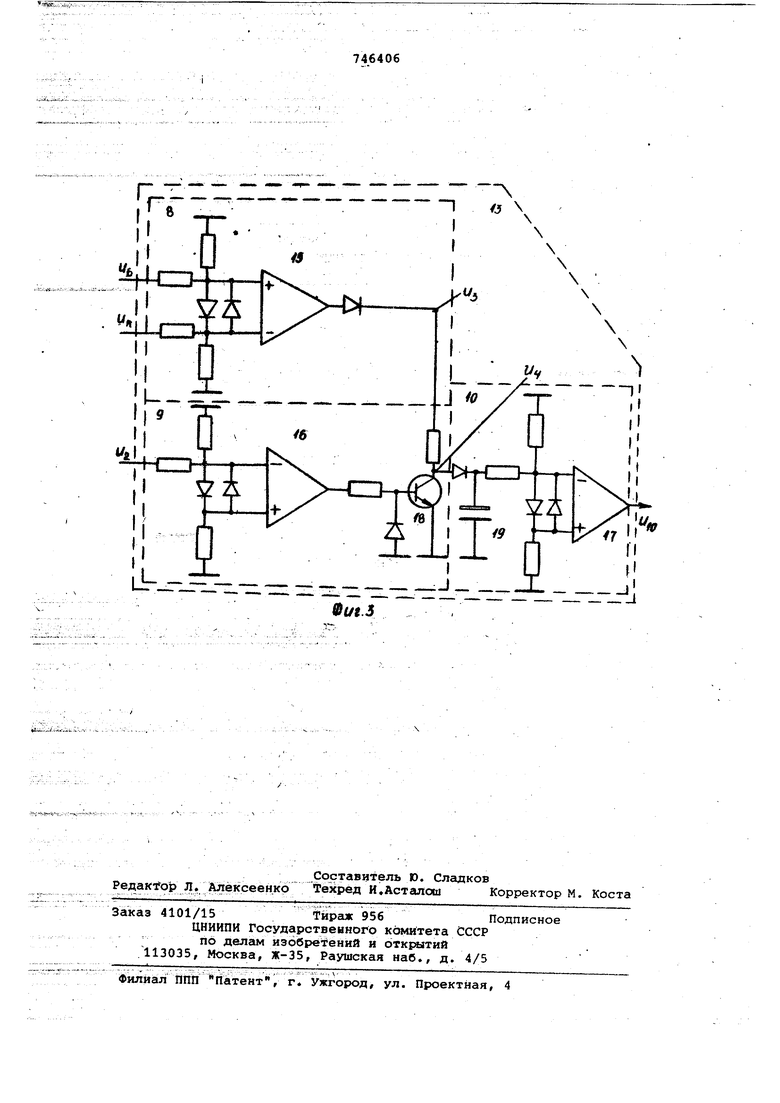
На фиг. 1 представлена блок-схема системы; на ф1тг. 2 - временные диаграммы, поясняющие работу системы на фиг. 3 - принципиальная электрическая схема нелинейного корректирующего устройства.
Устройство содержит измеритель ра1ср.гласования 1, первый и второй усилители 2, 3, исполнительный двигатель 4, редуктор 5, датчик 6 Угла, тахЬгенератор 7, порогорое устройство 8, блок 9 совпадения, согласующее устройство 10, первый и второйклю-. чи 11, 12, нелинейное корректирующее устройство 13, логический блок 14, первый второй и третий операционные усилители 15, 16, 17, транзистор 18, конденсатор 19.
На фиг, 2 и - выходное напряжение на выходе i -ого ф.ункциональног6 блока; Ufi - величина порога срабатывания порогового устройства; t - момент начала сравнения напряжений и и Ug ; tj, - срабатывания системы пЕ$й ограничении угла поворота выходного вала t, - моMefiT изменения фазы напряжения рассогласования U2 J t - момент срабатывания системы при смене фазы напряжения и .
....-.,,- ( .-; ,. - - J
Система работает следующим образом.
При угле поворота, меньшем предельного, напряжение UA на выходе датчика б угла не превьииает порогового значения Up и на выходах порогового устройства 8 и блока 9 совпадения напряжение равно нулю, а с выхода согласующего устройства 10 на управляющие входы ключей 11, 12 посГупаёт положительное напряжение , которое удерживает ключ 11 в замKtiytoM, а ключ ,12 в разомкнутом состоянии.. - -- . . При достижении выходным вгшом понедельного значения угла поворота (момент t, ) ё1мплитудное значение напряжения датчика U превыиает пороговое значение 11, и с выхода порогового устройства 8 на вход блока 9 совпадения поступает напряжение Ug в виде прямоугольных импуйьсов, временное положение которых совпадает с положением положительных пГблувЪлн напряжения UQ датчика 6 угла. .
746406
На второй вход блока 9 совпадения поступает напряжение рассогласования и с выхода усилителя 2. Если временное положение импульсов напряжения Ug совпадает с положением положительных полуволн напряжения Uj, то с выхода блока 9 совпадения на вход согласующего устройства 10 поступает серия импульсов Ug , которая изменяет положительное напряжение на выходе согласующего устройства 10 на отрицательное, что ведет размыканию ключа 11 и замыканию ключ 12, котбрь1й подключает к усилителю 3 тахогенератор 7, что вызывает интенсивное торможение исполнительного двигателя 4.
При изменении фазы напряжения Uj, (момент tj,) серия импульсов Ug исчезает. С выхода согласующего устройства 10 поступает положительное напряжение (йомент t), которое переключает ключи 11 и 12 в исходное состояние. Это приводит к вращению двигате-ля 4 в сторону, противоположную предьэдущему напряжению.
Пр,и повороте выходного вала в другую cTojpoHy система работает анауЛОГЛЧНО.
Пример схемной реализации нелинейного коррёктирукяцего устройства 13 представлен на фиг. 3. В этом случае пороговое устройство 8 построено I на основе операционного усилителя 115, блок 9 совпадения - на основе опрационного усилителя 16 и транзисторного ключа на транзисторе 18. Согласующее устройство 10 состоит из накопительной емкости-конденсатора 19 и операционного усилителя 16,
В случае применения в качестве датчика б угла цифрового датчика логический блок 14 работает .в системе согласующего ус-рройства 10.
Точность предлагаемой системы повышается примерно в два раза и составляет 10 .угловых минут.
Формула изобретения
Следящая система, содержащая последовательно соединенные измеритель рассогласования, первый усилитель, первый ключ,второй усилитель и исполнительный двигатель,выход которого через последовательно включениьге тахогенератор и второй ключ соединен со входом второго усилителя,а через,последовательно соединенные редуктор и датчик угла - с одним из входов измерителя рассогласования, и логический блок, первый вход которого соединен с выходом первого усилителя, второй вход - с выходом порогового устройства, а выход - с управляющим входом первого ключа, отличающаяся тем, что, с целью повышения точности системы, в ней вход порогового устройства соединен с выходом датчика угла, а управляющий вход второго ключа соединен с выходом логического блока.
Источники информации, принятые во внимание при экспертизе
482716, кл. G 05 В 11/01, 19Д0.73.2,Авторское свидетельство СССР 574699, кл. G 05 В 11/14, 19.09.74,
Фиг./
