1
Изобретение относится к электро- технике, в частности к электрическим машинам, и может быть использовано для привода механизмов промышленных роботов и манипуляторов, графопостроителей и координатографов,в периферических устройствах электронных вычислительных машин,-а также двухкоординатных столов станков, .прессов и другого металлообрабатывающего оборудования.
Известны двухкоординатные линейные электрические двигатели, в которых зубцы безобмоточных индукторов образованы двумя системами взаимно перпен- , дикулярных прорезей, а якори снабжены двумя системами взаимно перпендикулярных обмоток, взаимодействующих с зубцами индукторов 1
Наиболее близким по технической jo сущности к предлагаемому является двухкоординатный двигатель, содержащий якорь, включающий обмотку возбужния и две системы взаимно перпендикулярных зубцов, охваченных обмотками управления и безобмоточный индуктор, состоящий из двух частей, расположенных с обеих сторон якоря и снабженных зубцами, аналогичными зубцами якоряfzj.
Недостатком указанных двигателей является конструктивная сложность, обусловленная раздельным выполне шем частей якоря, обеспечивающих движение по каждой координате.
Цель изобретения - упрощение конструкции двигателя.
Указанная цель .достигается тем, что зубцы каждой из систем якоря размещены на полюсах П-образного магните-. провода, причем П-образные магнито-. проводы примыкают друг к другу спинками, которые охвачены упомянутой обмот кой возбуждения.
Такое выполнение якоря двигателя позволяет выполнить магнитопровод в виде одной детали, что упрощает конструкцию двигателя и уменьшает его . габариты.
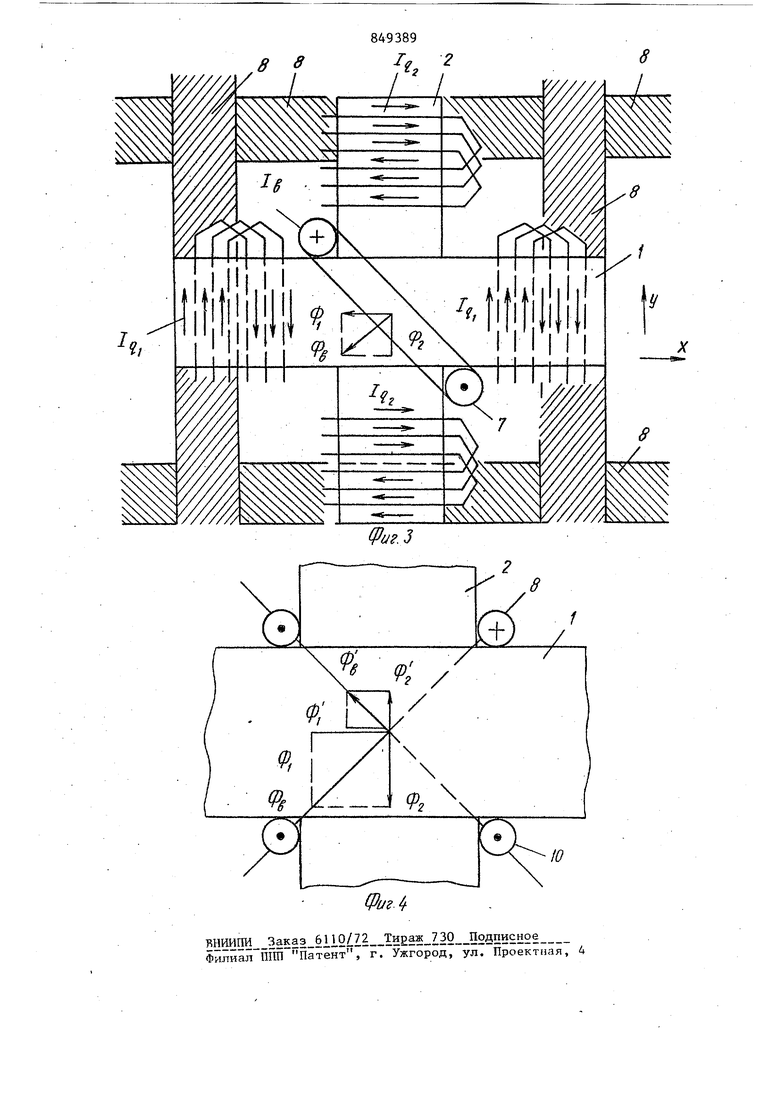
На фиг. 1 приведено пространственое изображение магнитопровода якоря; а фиг. 2 - двигатель в сборе; на иг. 3 - направление потоков возбуждеия, при одной обмотке возбуждения; 5 а фиг. 4 - то же, при двух обмотках возбуждения.i
Якорь двигателя (фиг. 1) состоит из двух П-образных магнитопроводов
1и 2, расположенных взаимно перпен- 10 икулярно и примыкающих спинками друг
к . Наружные поверхности их полюсов обращены в противоположные стороны и располагаются в параллельных плоскостях.15
Пазы 3 П-образного магнитопровода 1 и пазы 4 П-образного магнитопровода
2служат для укладки якорных обмоток (обмоток-управления).
Длина каждого из ранных участков, 20 служащих для укладки обмоток управления кратна двум полюсным делениям двигателя tT . Участки, несущие якорные обмотки двигателя разделяются пазами 5 и 6, служащими для зпсладки 25 одной или двух обмоток возбуждения 7 и 8 фиг.(3 и 4).
Индуктор двигателя (фиг. 2) образован двумя одинаковыми ферромагнитными полюсами 9 переменного сечения с 30 зубцами 10 и пазами 11 шириной, равной полюсному делению двигателя t ,
Пазы 11 могут быть заполнены немагнитным материалом. Оси зубцов 10 и пазов 11 полос 9 взаимно перпенди- 35 кулярны.
Двигатель может иметь одну диагональную обмотку возбуждения 7 (фиг. З) или две - 7 и 8 (фиг. 4) , что расширяет диапазон регулирования скорости 0 двигателя.,
Двигатель работает следующим образом.
При подаче напряжения на обмотку возбуткдения 7 (фиг. З)магнитный поток , создаваемый ею, разлагаясь на магнитные потоки Ф и замыкается через магнитопроводы 1 и 2 якоря и соответствующие пластины 9 индукто-
ра. Если пропустить по якорной обмотке магнитопровода 1 ток InjS направлении, показанном на фиг. 3, то возникает электромагнитная сила, стремящаяся переместить якорь.влево (фиг. 2, .
Схема управления коммутирует секции якорных обмоток для сохранения .направления этого усилителя.
При подаче в якорную обмотку магнитопровода 2 тока lajjB направлении, показанном на фиг. 2 и фиг. 3, якорь будет перемещься вдоль оси У.
Подача одновременно токов в обмотки управления обоих магнитопроводов обеспечивает движение якоря по обеим координатам X и У.
При закреплении яксзря аналогичные движения-обеспечивает подвижный индуктор.
Формула изобретения
Двухкоординатный электрический двигатель, содержащий якорь, включающий обмотку возбуждения и две системы взаимно перпендикулярных зубцов, охваченных обмотками управления, и безобмоточный индуктор, состоящий из двух частей, расположенных с обеих сторон якоря и снабженных зубцами, аналогичными зубцам . якоря, о тлич.ающ и и с я тем, что, с целью упрощения конструкции, зубцы каждой из систем якоря размещены на полюсах П-образного магнитопровода, причем П-образные магнитопроводы примыкают-друг к другу спинками, которые охвачены упомянутой обмоткой возбуждения.
Источники информации, принятые во внимание при экспертизе
1.Луценко В.Е. и Рубцов В.П. Электропривод с шаговыми двигателями. Электропривод и автоматизация промышленных установок, 1978, т.6, с. 25-32.
2.Авторское свидетельство СССР № 504278, кл. Н 02 К 41/02, 1972.
Ф1Сё..1

| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный шаговый электродвигатель | 1975 |
|
SU577616A1 |
| Двухкоординатный шаговый электродвигатель | 1977 |
|
SU657539A1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2019 |
|
RU2727956C1 |
| Индукторный генератор автономного питания независимых нагрузок | 2023 |
|
RU2813842C1 |
| Линейный шаговый электродвигатель | 1972 |
|
SU504278A1 |
| Линейный шаговый электродвигатель | 1978 |
|
SU752656A1 |
| Двухкоординатный электродвигатель постоянного тока | 1980 |
|
SU1037384A1 |
| Двухкоординатный линейный электродвигатель | 1979 |
|
SU942218A1 |
| Двухкоординатный линейный шаговый двигатель | 1976 |
|
SU604094A1 |
| Бесконтактная элекрическая машина | 1971 |
|
SU492020A1 |

Ч «V ©@®©
Фиг.г ®Шй, l
