Предм.етом изобретения KB.naeteH pOTCip гелИКоптера с цик.пичегки ко. еблющИМ И1Ся относительно продольных осей лОпагтямИ, связанным.и между собой посредством KOipoмьгсла и толкателей.
Отличительная особенность ротора заключается в том, что нрИ трехлопастной схеме ротора применоно промежуточное коромысло, связанное концами с качалками двух лопастей и точкой опоры е одноплечил рычагом, взаимодействующим через толкатель с основньгм коромыслом, которое через толкатель соединено с третьей лопастью.
Голов ка ротора снабжена направ.г|яюп1им и для толкателей, сопряженных с коромыслом скользящим ооединением.
Для изменения ноложеНИя плоскости врап1.е.ния ротора, ось качапий коромысла выполнена смещаемой вбок относительно оси вращения ротора под действием рукоятки управления.
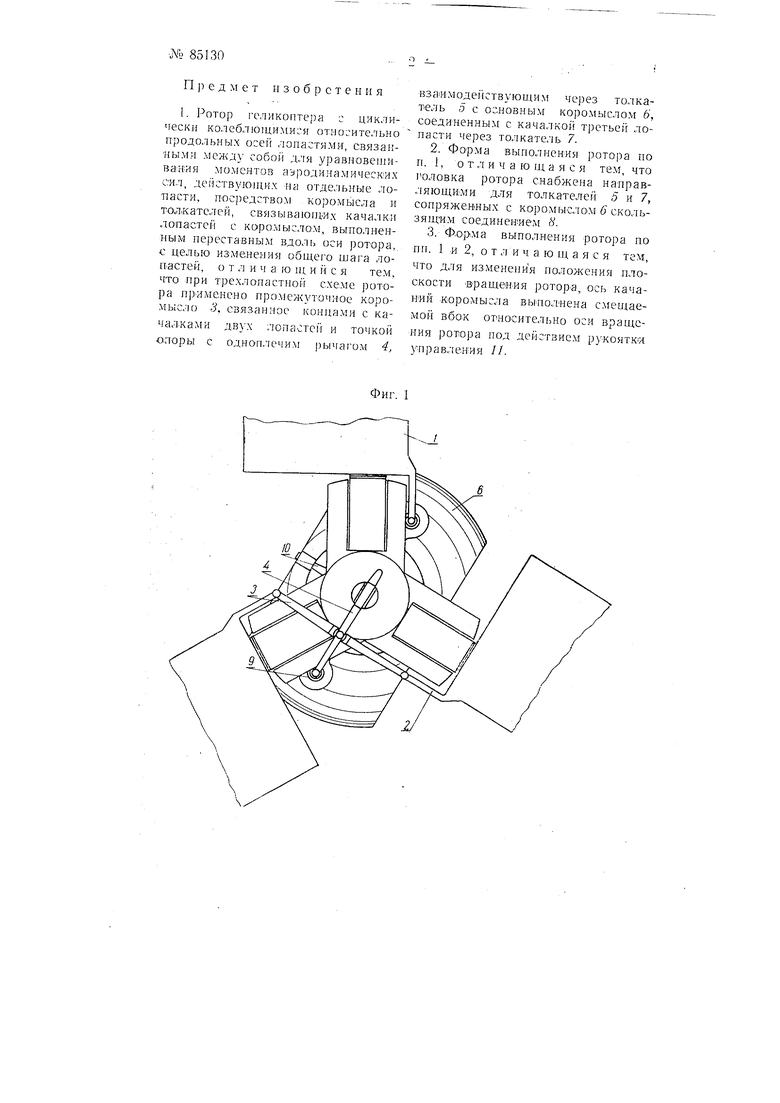
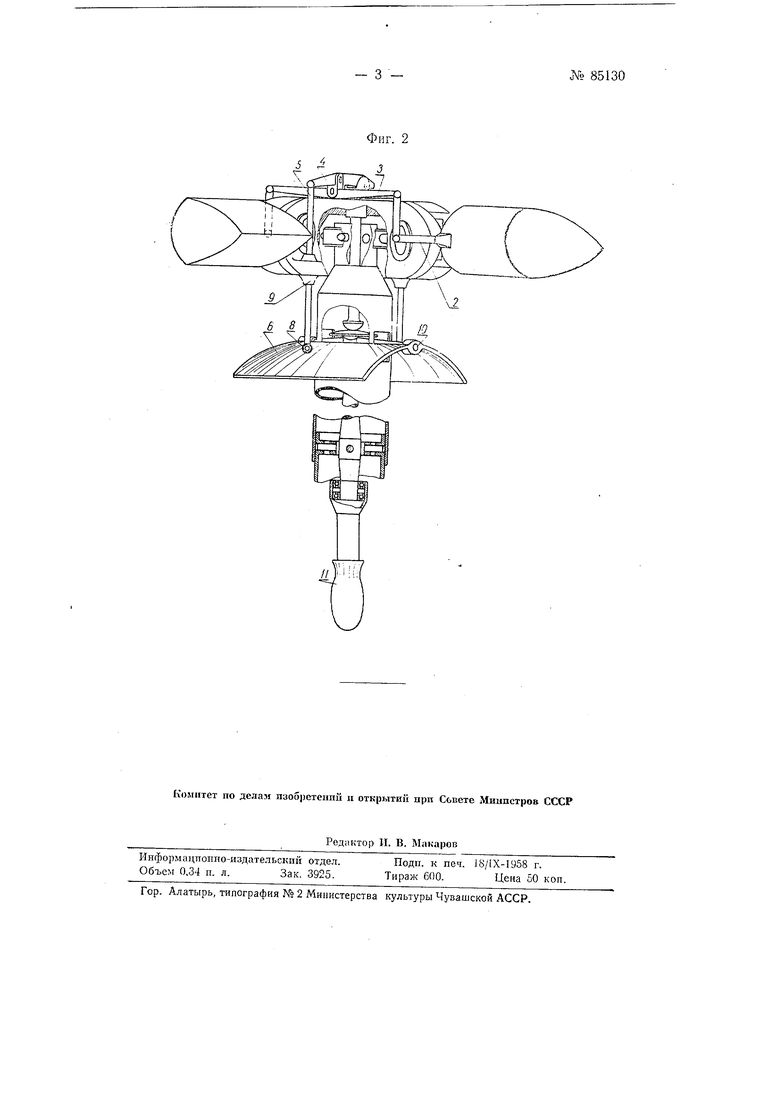
На фиг. 1 и 2 изображена принципиальная схема предлагаемого ротора.
Три лопасти / ротора геликоптера взаимно связаны вращающейся совместно с ними системой рычагов. Паводки 2 двух лопастей соединены
через промежуточное коромысло 3, одпоплечи рычаг 4 и толкатель 5 с основным каромысло.м 6, а поводок третьей лопасти связан с основным ко ромыслом б непосредственно мерез Второй толкатель 7, опираютцийся на ocHoiBHoe коромысло с другой диаметрально-проа-ивоположной стороны. То.лкатели 5 и 7, сопряженные с осн0;вным коромыслом 4eij)e3 скользяп1ие соединенгля 8, выголнеппые в виде njapOBHx опор, перемепипотся вверх и вниз в нап|раВляюп1их вту.лках 9, которы-ми снабжена голозка рото: эа.
Для изменения, положения плоскости в рапгения )отора, ось качания 10 основного коромысла под де11ствием рукоятки уп)авления // С:мен;ается вбОК относительно оси и я р ото) а.
Управление обшим шагом лопастей производится путем перемещения союзного коромысла вверх илгл вниз.
В описанной конструкц-ИИ ротора движения eio лОНастей связаны между собой так, что увеличение угла установки одной лопасти (Или двух лопастей) вызывает уменьщение угла установки остальных лопастей ротсра до тех пор, пока не наст Г1 и т р а в н овес }i ос по. ож сние.
Предмет изобретен и я
1. Ротор геликоптера с циклитески колеблющими:; отно:-ительно продольных осей лопастями, связанными между собой для уравновепшва:ггия моментов аэродинамических си,1, денствующи.х на отдельные ;toпасти, посредством коромысла и тол-кателей, связывающих качалки лопастей с каромысло:М, выполненным переставным вдол) оси ротора, с целью изменения общего тага лоцаетей, о т л и ч а ю ni, и и с я тем, что при трехлопастной схеме ротора прИменено промежуточное коромысло 3, связанное концами с ка.алками двух лопастей и точкой олоры с одноплечим |)ычаго.м 4,
взаатмодемстзующим через толкатель 5 с основным коромыслом 6, соединенным с качалкой третьей лопасти через толкате/ш 7.
2.Форма вынолпения ротора по п. 1, о т л и ч а ю щ а я с я тем, что головка ротора снабжена направ; яющи ми для толкателей 5 и 7, сопряженных с коромыслОМ 6 скользящим соединеп ием 8.
3.O.QpiMa выполнения ротора по пн. 1 и 2, о т ли чаю ш. а я с я тем, что для изменепия положения плоскости Вращения ротора, ось качаний коромысла выполнена смещаемой вбок относительно оси вращения ротора под действием рукоятюя управ.тения //.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВТУЛКА НЕСУЩЕГО ВИНТА | 2002 |
|
RU2235662C2 |
| Несущий винт геликоптера | 1945 |
|
SU67251A1 |
| Переносный клепальный пневматический пресс | 1953 |
|
SU102185A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЛЕНТОЧНОГО КОНВЕЙЕРА В ЭЛЕКТРОФОТОГРАФИЧЕСКОЙ МАШИНЕ | 1969 |
|
SU419060A3 |
| НЕСУЩИЙ ВИНТ | 2005 |
|
RU2281885C1 |
| Гироскопический указатель крена железнодорожных или иных вагонов | 1947 |
|
SU71757A1 |
| Горизонтальный гибочный пресс | 1957 |
|
SU112901A1 |
| Картофелекопалка | 1989 |
|
SU1755728A1 |
| СТАНОК-КАЧАЛКА | 1995 |
|
RU2105197C1 |
| БОКОВАЯ РУКОЯТКА УПРАВЛЕНИЯ | 1994 |
|
RU2090448C1 |