(54) МАГНИТОМОДУЛЯЦИОННЫЙ ДАТЧИК ПОЛОЖЕНИЯ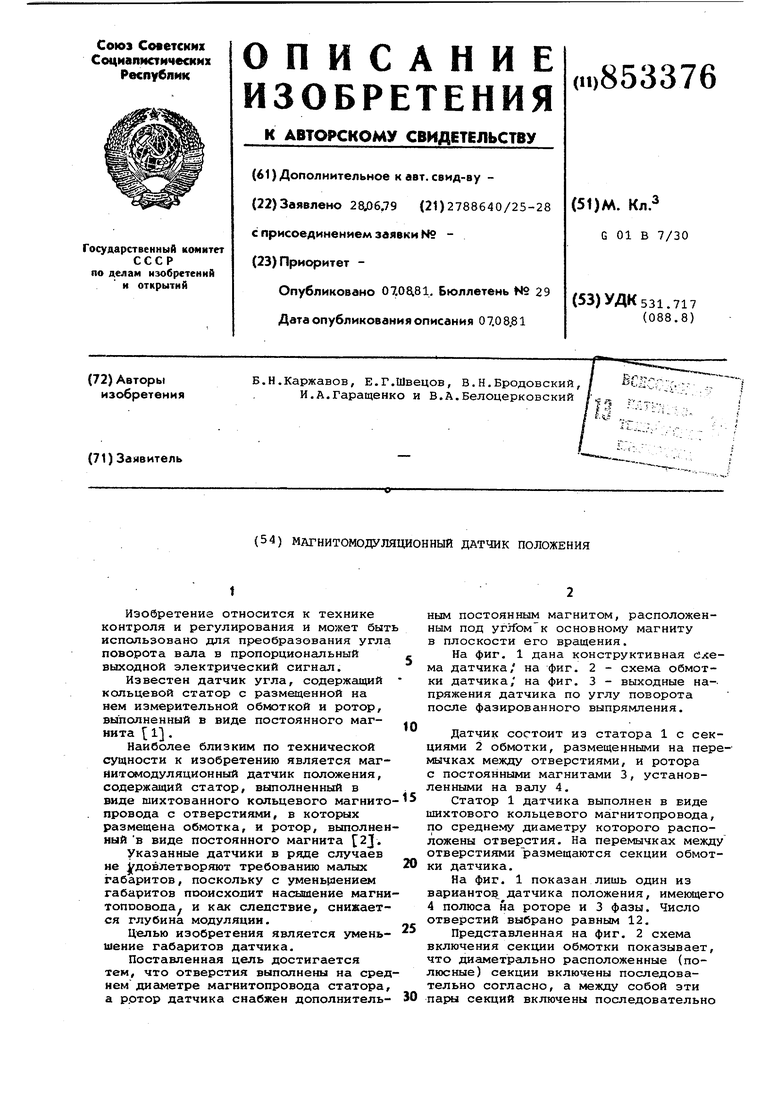
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитомодуляционный датчик углового перемещения | 1982 |
|
SU1060936A1 |
| Индуктивный датчик угловых перемещений | 1978 |
|
SU765944A1 |
| Дифференциальный индуктивный датчикуглОВыХ пЕРЕМЕщЕНий | 1979 |
|
SU851671A1 |
| Индуктивный датчик угловых перемещений | 1978 |
|
SU1034129A2 |
| Магнитомодуляционный датчик углового перемещения | 1986 |
|
SU1388705A1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА С ПОПЕРЕЧНЫМ МАГНИТНЫМ ПОТОКОМ (ВАРИАНТЫ) | 2018 |
|
RU2690666C1 |
| ЭЛЕКТРОДВИГАТЕЛЬ ПОГРУЖНОГО НАСОСА | 1998 |
|
RU2145142C1 |
| Способ изготовления статоров электрических машин | 1978 |
|
SU773843A1 |
| Вентильный электродвигатель | 1989 |
|
SU1720129A1 |
| Датчик углового положения | 1984 |
|
SU1226038A1 |
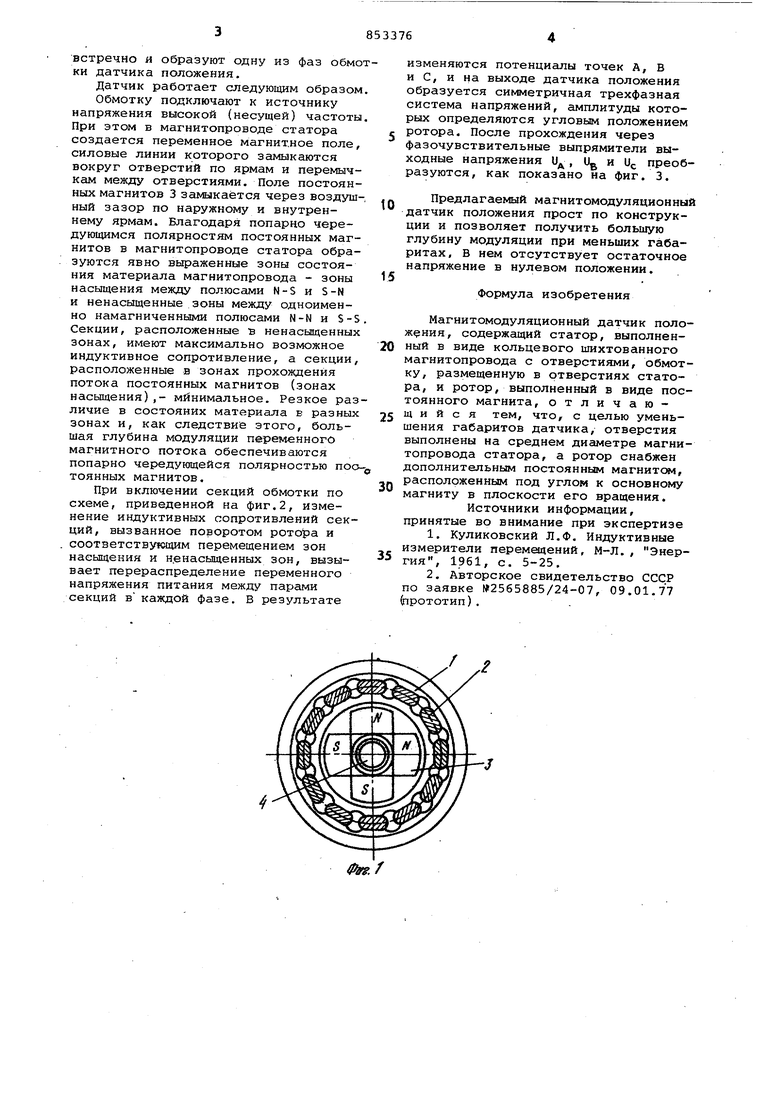
Изобретение относится к технике контроля и регулирования и может быт использовано для преобразования угла поворота вала в пропорциональный выходной электрический сигнал. Известен датчик угла, содержащий кольцевой статор с размещенной на нем измерительной обмоткой и ротор, выполненный в виде постоянного магнита 1. Наиболее близким по технической сущности к изобретению является магнитомодуляционный датчик положения, содержащий статор, выполненный в виде шихтованного кольцевого магнито провода с отверстиями, в которых размещена обмотка, и ротор, выполнен ный в виде постоянного магнита . Указанные датчики в ряде случаев не удовлетворяют требованию малых габаритов, поскольку с уменьшением габаритов пооисхолит насыщение магни топповода, и как следствие, снижает ся глубина модуляции. Целью изобретения является умень шение габаритов датчика. Поставленная цель достигается тем, что отверстия выполнены на сре нем диаметре магнитопровода статора а рртор датчика снабжен дополнитель ным постоянным магнитом, расположенным под yrJfOM K основному магниту в плоскости его вращения. На фиг. 1 дана конструктивная схема датчика/ на фиг. 2 - схема обмотки датчика; на фиг. 3 - выходные на-пряжения датчика по углу поворота после фазированного выпрямления. Датчик состоит из статора 1 с секциями 2 обмотки, размещенными на перемычках между отверстиями, и ротора с постоянными магнитами 3, установленными на валу 4. Статор 1 датчика выполнен в виде шихтового кольцевого магнитопровода, по среднему диаметру которого расположены отверстия. На перемычках между отверстиями размещаются секции обмотки датчика. На фиг. 1 показан лишь один из вариантов датчика положения, имеклцего 4 полюса на роторе и 3 фазы. Число отверстий выбрано равным 12. Представленная на фиг. 2 схема включения секции обмотки показывает, что диаметрально расположенные (полюсные) секции включены последовательно согласно, а между собой зти пары секций включены последовательно
встречно я образуют одну из фаз обмоки датчика положения.
Датчик работает следующим образом
Обмотку подключают к источнику напряжения высокой (несущей) частоты При этом в магнитопроводе статора создается переменное магнитное поле, силовые линии которого замыкаются вокруг отверстий по ярмам и перемычкам между отверстиями. Поле постоянных магнитов 3 замыкается через воздушный зазор по наружному и внутреннему ярмам. Благодаря попарно чередующимся полярностям постоянных магнитов в магнитопроводе статора образуются явно выраженные зоны состояния материала магнитопровода - зоны насыщения между полюсгми N-S и S-N и ненасыщенные зоны между одноименно намагниченными полюсами N-N и S-S Секции, расположенные в ненасыщенных зонах, имеют максимально возможное индуктивное сопротивление, а секции, расположенные в зонах прохождения потока постоянных магнитов (зонах насыщения),- минимальное. Резкое различие в состояних материала в разных зонах и, как следствие зтого, большая глубина модуляции переменного магнитного потока обеспечиваются попарно чередующейся полярностью поо тоянных магнитов.
При включении секций обмотки по схеме, приведенной на фиг.2, изменение индуктивных сопротивлений секций, вызванное поворотом и соответствующим перемещением зон насыщения и н.енасыщенных зон, вызывает перераспределение переменного напряжения питания между парами секций в каждой фазе. В результате
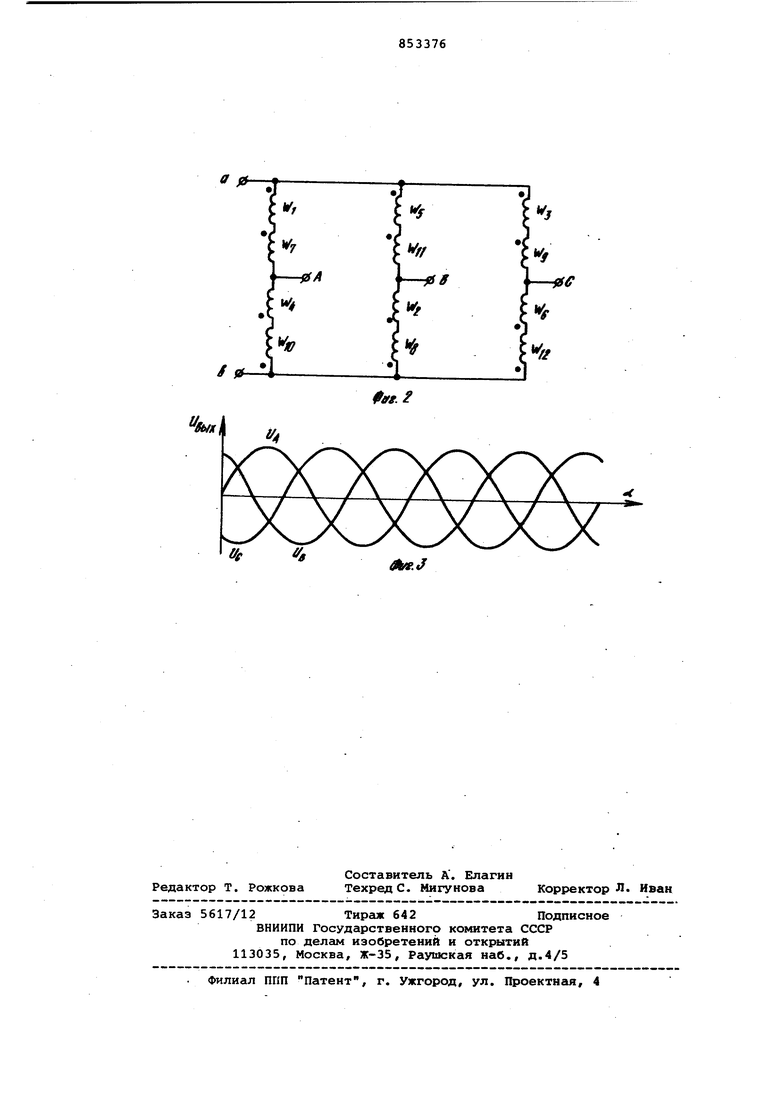
изменяются потенциалы точек А, В и С, и на выходе датчика положения образуется симметричная трехфазная система напряжений, амплитуды которых определяются угловым положением ротора. После прохождения через фазочувствительные выпрямители выходные напряжения Цд , U и и. преобразуются, как показано на фиг. 3.
Предлагаемый магнитомодуляционны датчик положения прост по конструкции и позволяет получить большую глубину модуляции при меньших габаритах, В нем отсутствует остаточное напряжение в нулевом положении.
Формула изобретения
Магнитомодуляционный датчик положения, содержащий статор, выполненный в виде кольцевого шихтованного магнитопровода с отверстиями, обмотку, размещенную в отверстиях статора, и ротор, выполненный в виде постоянного магнита, отличающийся тем, что, с целью уменьшения габаритов датчика, отверстия выполнены на среднем дигииетре магнитопровода статора, а ротор снабжен дополнительным постоянным магнитом, расположенным под углом к основному магниту в плоскости его вращения.
Источники информации, принятые во внимание при экспертизе
/ ff
