10
15
20
25
Изобретение относится к контроль- где R о-измерительной технике и может ыть использовано для измерения уга поворота вала и преобразования глового положения в синусоидальный ыходной сигнал.
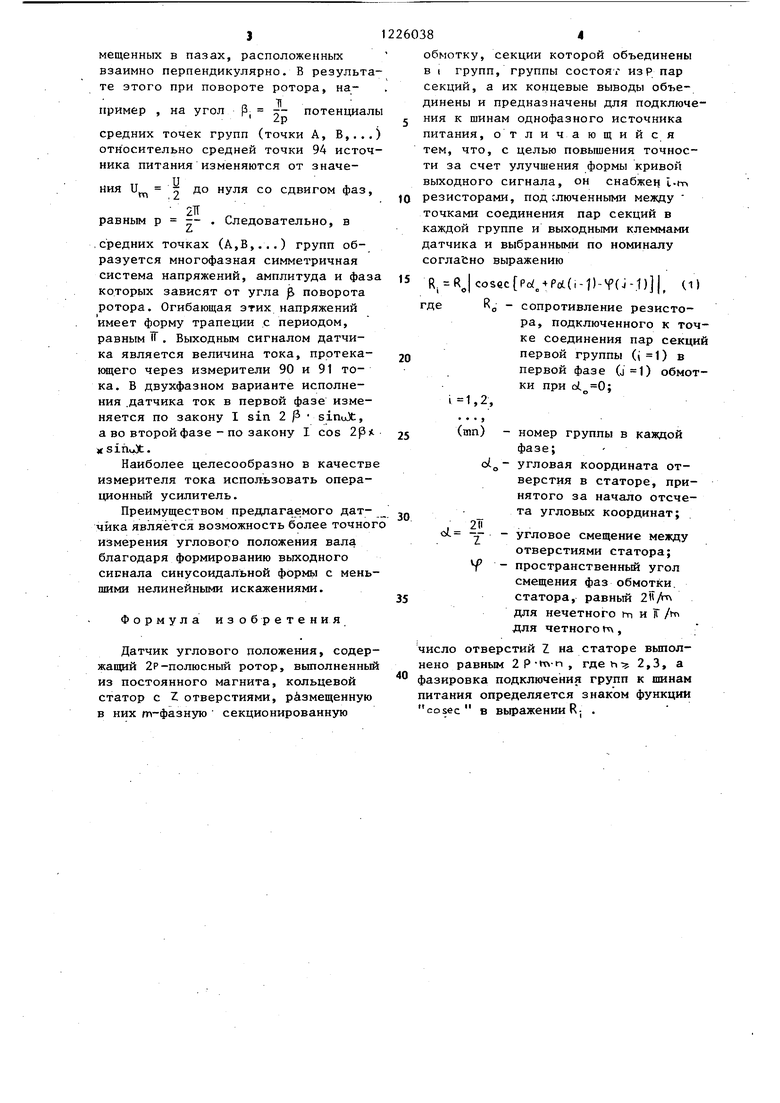
На -фиг.1 изображена конструкция вухфазного () четВ1рехполюсного (2Р 4) датчика углового положения числом отверстий на статоре Z 24 (п 3); на фиг.2 - электриеская схема датчика (в скобках укааны номера отверстий, в которых азмещены секции обмотки датчика.) .
Датчик углового положения содерит кольцевой статор 1 с Z отверстияи 2 - 25 (), четьфехполюсный отор 26, выполненный в виде двух тержневых постоянных магнитов, разещенных на валу 27. В отверстиях 2 - 25 размещаются секции 28 - 75 обмоти датчика (по две секции в каждом отверстии), соединенные в соответст- ВИИ с электрической схемой (фиг.2). Секции, размещенные в диаметрально асположенных отверстиях статора, объединены попарно, а пары, располоенные в пространстве на взаимно перпендикулярных диаметрах, .объединены в группы. Например, секции 28 и 40, - размещенные в диаметрально р асполот женных отверстиях 2 и 14, объединены в одну пару, а секции 34 и 46, размещенные в диаметрально расположенных отверстиях 8 и 20, - в другую пару. Поскольку диаметр, на котором расположены отверстия 2 и 14, расположен в пространстве перпендикулярно диа- йетру, содержащему отверстия 8 и 20, то указанные пары секций 28, 40 и 34, 46 объединены в группу, .образуя срелз1юю точку А. Количество групп для каждой фазы равно .
Средние точки групп (точки соединения пар секций, например точки А, В,...) подключены через резисторы 76 - 87 к соответствующим выходным клеммам 88 и 89 датчика, к которым присоединены измерители 90 и 91 тока. Концевые выводы всех групп секционированной обмотки датчика подключены к шинам 92 и 93 однофазного источника питания, имеющего заземленную среднюю точку 94.
Соп ротий пения Рч. резисторов датчика выбираются по номиналу соглас- 55 но выражению
R, R,fcosec poi--«-po((i-l) -V(j- )JK °(1)
i
oi
30
35
45
50
Для ния да ние ре зы (jполуче
а сопр которы второй
Чис полнен ло бол соиде ка мож
Вза групп деляет вьфаже
Есл тельнь мотки, тии, п шине п то к р ции 3 тии 5
Дат зом.
При на нек зон ра 1 п даря ч жение ,92 и 9
сопротивление резистора, подключенного к точ-, ке соединения пар секций первой группы () в первой фазе (j-1) обмотки при о( 0;
5
0
5
5
Ы oi 0
5
5
0
(mn) - номер группы в каждой фазе;
угловая координата отверстия в статоре, принятого за начало отсчета
угловых координат; Z1T - угловое смещение между
отверстиями .статора; у - пространственный угол смещения фаз обмотки статора, равный 21Т/т для нечетного m и ТТ/т для четного га.
Для двухфазного варианта выполнения датчика (, ) сопротивление резисторов 76-81 для первой фазы (j1) рассчитываются по формуле, полученной из выражения (1):
{ cosec 2б/„+ |(i-1)} , (2) а сопротивления; резисторов 82 - 87,, которые подключены к выходной клемме второй фазы (),- по формуле
1 i-l)} 3)
Число отверстий Z на статоре выполнено равньм 2 p ta.n. Чем это число больше, тем более близкая к синусоиде форма выходного сигнала датчика може Т быть получена.
Взаимная фазировка подключения групп к шинам 92 и 93,питания определяется знаком функции cosec в вьфажении (1) для R. .
Если знак этой функции положи- тельньш, то секции данной фазы обмотки, расположенные в одном отверстии, присоединены к одной и .той же; шине питания, а если отрицательный- то к различным шинам (например, секции 31 и 35, расположенные в отверстии 5, фиг.2).
Датчик работает следующим образом.
При повороте ротора 26 датчика на некоторьй угол р. происходит смена зон н асыщения магнитопровода статора 1 под полюсами рротора, благодаря чему перераспределяется напряжение питания, приложенное к шинам ,92 и 93, между парами секций, разпример , на угол Р, «- потенциалы
3
мещенных в пазах, расположенных взаимно перпендикулярно. В результате этого при повороте ротора, наJ
2р
средних точек групп (точки А, В,,..) относительно средней точки 94 источника питания изменяются от значения и 2 ДО нуля со сдвигом фаз,
2ТГ равным р -- . Следовательно, в
,средних точках (А,Б,,..) групп образуется многофазная симметричная система напряжений, амплитуда и фаза которых зависят от угла f, поворота ротора. Огибающая этих напряжений имеет форму трапеции с периодом, равным И . Выходным сигналом датчика является величина тока, протекающего через измерители 90 и 91 тока. В двухфазном варианте исполнения .датчика ток в первой фазе изменяется по закону I sin 2 Р siniJt, а во второй фазе - по закону I cos 2j3ii «siriujt.
Наиболее целесообразно в качестве измерителя тока испол-ьзовать операционный усилитель.
Преимуществом предлагаемого дат- чйка является возможность более точног измерения углового положения вала благодаря формированию выходного сигнала синусоидальной форму с меньшими нелинейными искажениями.
Формула изобретения
Датчик углового положения, содержащий 2Р-полюсный ротор, вьтолненный из постоянного магнита, кольцевой статор с Z отверстиями, размещенную в них т-фазную секционированную
260384
обмотку, секции которой объединены в I групп, группы состоят изР пар секций, а их концевые выводы объединены и предназначены для подключе- 5 ния к шинам однофазного источника питания, отличающийся тем, что, с целью повышения точности за счет улучшения формы кривой выходного сигнала, он снабжен I.(T to резисторами, под слюченными между точками соединения пар секций в каждой группе и выходными клеммами датчика и выбранными по номиналу согласно выражению
15
R.R cosec Po + Pot(,-t)-y(j-1)|, (i)
где
R.
,2.
сопротивление резистора, подключенного к точке соединения пар секций первой группы (i 1) в первой фазе () обмотки при d. 0;
О
25 (mn) - номер группы в каждой
фазе;
Ыц- угловая координата отверстия в статоре, принятого за начало отсчеэпта угловых координат;
о- 211 . - - угловое смещение между
отверстиями статора; V - пространственный угол смещения фаз обмотки. 35статора, равный 2«М
для нечетного m и 1Г /IT, для четного п,
число отверстий Z на статоре выполнено равным , гдеь 2,3, а фазировка подключения групп к шинам питания определяется знаком функции со sec в выражении R; .
гд
п
Фиг.1
12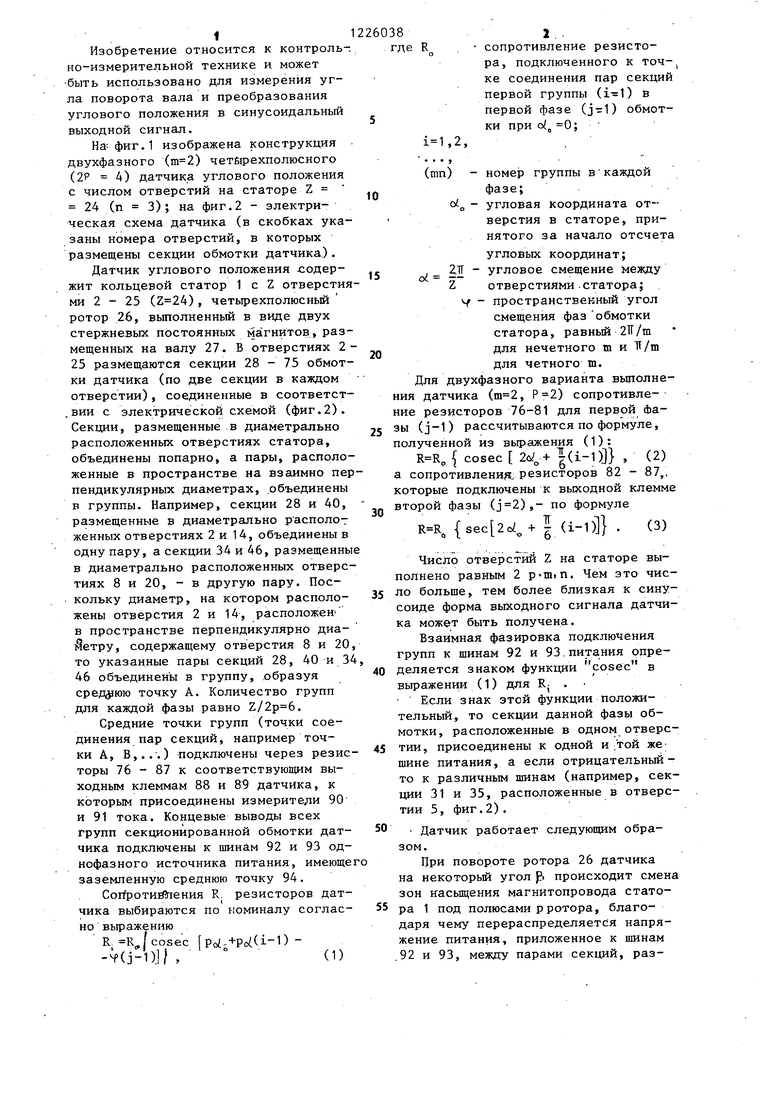
| название | год | авторы | номер документа |
|---|---|---|---|
| Дифференциальный индуктивный датчикуглОВыХ пЕРЕМЕщЕНий | 1979 |
|
SU851671A1 |
| Индуктивный датчик угловых перемещений | 1978 |
|
SU1034129A2 |
| Измеритель скорости вращения | 1979 |
|
SU853547A1 |
| Индуктивный датчик угловых перемещений | 1978 |
|
SU765944A1 |
| Автономная система электрооборудования с вентильным электродвигателем | 1985 |
|
SU1356134A1 |
| Магнитомодуляционный датчик углового перемещения | 1982 |
|
SU1060936A1 |
| Электропривод | 1981 |
|
SU1083319A1 |
| Устройство для моделирования электромагнитных процессов в асинхронных машинах | 1988 |
|
SU1594569A1 |
| Магнитомодуляционный датчик углового перемещения | 1986 |
|
SU1388705A1 |
| Устройство для моделирования электромагнитных процессов в асинхронных машинах | 1989 |
|
SU1681315A1 |
Изобретение позволяет повысить точность контроля углового положения вала за счет улучшения формы кривой выходного сигнала датчика. Датчик содержит 2Р-полюсный ротор с посто- яннными магнитами и статор с отверстиями для размещения в них секций пг)-фазной обмотки. Число отверстий Z 2Р-1т..ь, , 3. С увеличением числа пазов,а следовательно. и числа секций обмотки датчика увеличивается точность формирования синусоидального выходного сигнала датчика. Принцип действия датчика основан на смене зон насьпцеНия маг- нитопровода статора под полюсами ротора и изменении индуктивного сопротивления соответствукнцих секций обмотки датчика. Благодаря этому с помощью резисторов К; , подключенных к средним точкам (,6 ,...) групп, образованных соответствукнци- ми парами секций обмотки, формиру- етсят-фазное напряжение (при питании датчика от источника однофазного напряжения), модулированное по амплитуде по гармоническому закону в функции контролируемого углового положения. 2 ил. ел ьо ю О) со 00
30
«
141 т
I I
/«
л;
(9 fO
36
чв
Г1
D «)D ( l) (n) (H (l.
чэ
а
j/
43
J7
w
т I n
I
it3i(S)
n
ЯГ
/
7
so
9t
.Составитель H. Лупачев РедактррО. Юрковецкая Техред Н.Бонкало
Заказ 2110/28 Тираж 670Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственмо-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор Л. Пилипенко
| Магнитомодуляционный датчикпОлОжЕНия | 1979 |
|
SU853376A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
