f3
//
fQ
DO 00
00
о
СЛ
ft
Изобретение относится к измерительной технике и может быть использовано для преобразования угла пово рота в электрический сигнал.
Цель изобретения - повьппение точности ма1-нитомодуляционного датчика углового перемещения за счет уменьшения влияния технологических погрешностей изготовления и температурной нестабильности крутизны выходной характеристики датчика на глубину модуляции выходного сигнала.
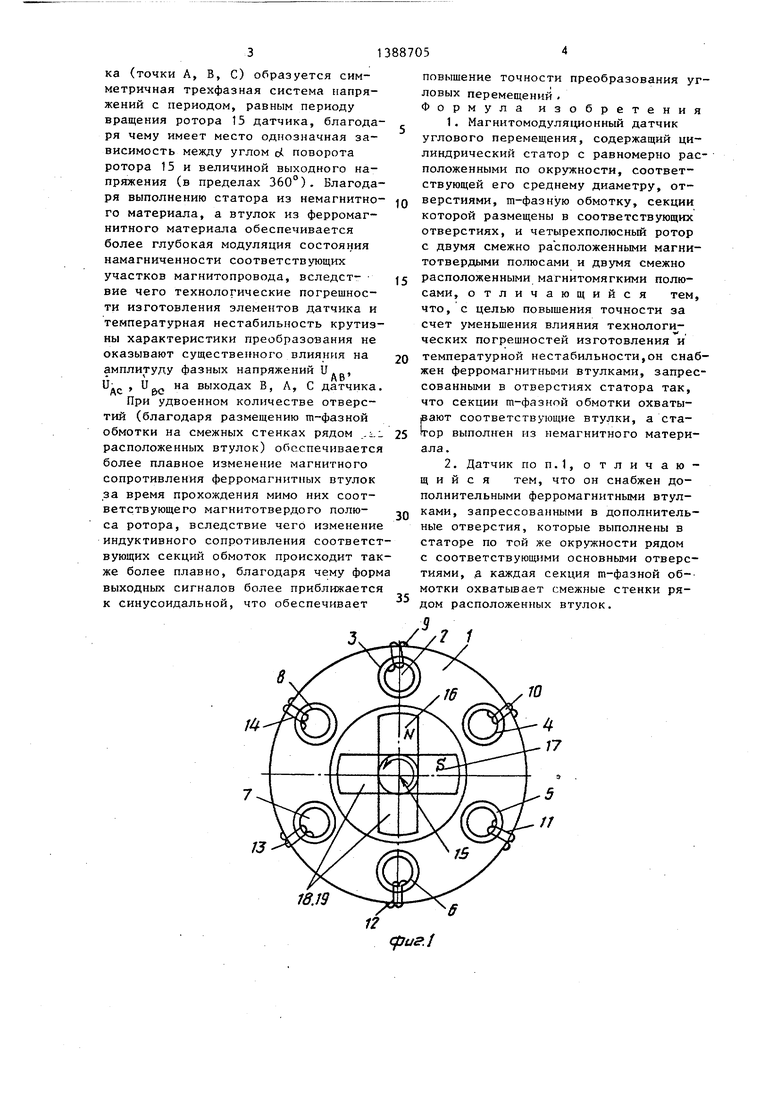
На фиг. 1 изображено конструктивное выполнение магнитомодуляционного датчика углового перемещения с коли- .чеством фаз на фиг. 2 - то же, при удвоенном количестве отверстий в статоре; на фиг. 3 - схема соединения секций т-фазной обмотки при .
Магнитомодуляционный датчик, углового перемещения содержит цилиндрический статор 1, выполненньй из немагнитного материала и имеющий равномерно расположенные по окружности, соответствующей его среднему диаметру, отверстия 2, в которые запрессованы ферромагнитные втулки 3-8, охваченные витками секций 9-14 трехфазной обмотки соответственно. В центре статора.1 (соосно с ним) установлен четырехполюсный ротор 15 с двумя смежно расположенными магнито- твердыми полюсами 16 и 17 и двумя смежно расположенными магнитомягки- ми полюсами 18 и 19.
В датчике с дополнительными отверстиями 20 ферромагнитные втулки 21-26 запрессованны в дополнительные . отверстия 20, которые расположены по той же окружности, что и основные отверстия 2, и рядом с ними,так, что секции 9-14 трехфазной йбмотки охватывают смежные стенки рядом расположенных втулок 3 и 21, 4 и 22, 5 и 23, 6 и 24, 7 и 25, 8 и 26 соответственно. Пары диаметрально : расположенных секций 9 и 12, 11 и 14, 13 и 10 образуют соответствующую фазу трехфазной обмотки и подключены к. источнику 27 питания переменного тока.
Магнитомодуляционный датчик углового перемещения работает следующим образом.
При подключении обмоток датчика к источнику 27 питания переменного тока напряжение источника 27 распределяется между секциями 9 и 12,
13 трехфазной обмотки от их индуктивного со5
0
5
0
5
противления X j. Выходной сигнал сни- мается с точек А, В и С соединения диаметрально расположенных секций, соединенных попарно. Индуктивное сопротивление каждой секции определяется магнитным состоянием ферромагнитных втулок, на которых размещена соответствующая секция.
Например,при указанном на фиг.1 положении ротора 15, соответствующем угловому положению с1.-0 втулка, охваченная секцией 14, находится в ненасьщенном состоянии, вследствие чего индуктивное сопротивление X секции 14 максимально. При повороте ротора-15 против часовой
0 стрелки втулка 8, охваченная секцией 14, насыщается, снижая индуктивное сопротивление X ., секции 14. При повороте ротора 15 на угол di -9G° насьщение втулки 8, определяющей ин5 дуктивное сопротивление секции 14,
достигае,т максимума, так как все маг- нитное поле ротора 15 замыкается через нее. При этом индуктивное сопротивление X секции 14 минимальное и
0 остается таким при дальнейшем повороте ротора 15 до угла oLy120°. При повороте ротора от 0 120 до о( i , 210° С происходит уменьшение намагниченности втулки 8 и, как следствие, возрастание индуктивного сопротивления
14
до максимума. В диапазоне углов оС от
° до 360 индуктивное сопротив210ление
X,
остается максимальным и по
f4 величине.
Секция 11 расположена диаметрально противоположно секции 14, поэтому изменения ее индуктивного сопротивления X .. происходят со сдвигом фаз на 180° относительно Х,. Периодическое изменение X ., и X , сдвину
11
тых по фазе на 180°, вызывает перераспределение напряжения источника 27 питания между этими секциями, вследствие чего осуществляется модуляция высокочастотного напряжения питания в точке Б с частотой вращения ротора 15.
Аналогично, но со сдвигом по фазе на 120° и 240°, происходят изменения индуктивных сопротивлений других секций трехфазной обмотки, а следовательно, и напряжений в точках А и С соединения секций обмотки датчика. В результате на выходе датчи/J
18.19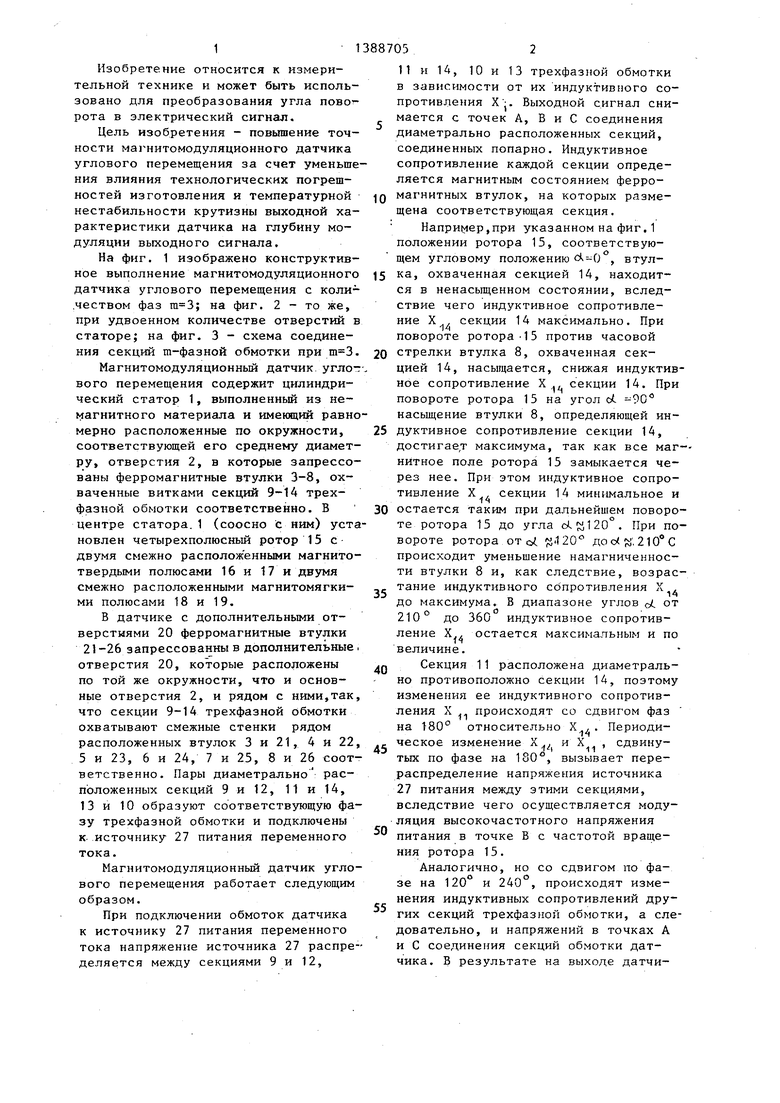
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитомодуляционный датчик углового перемещения | 1982 |
|
SU1060936A1 |
| Магнитомодуляционный датчикпОлОжЕНия | 1979 |
|
SU853376A1 |
| Датчик углового положения | 1984 |
|
SU1226038A1 |
| Индуктивный датчик угловых перемещений | 1978 |
|
SU765944A1 |
| Дифференциальный индуктивный датчикуглОВыХ пЕРЕМЕщЕНий | 1979 |
|
SU851671A1 |
| ТРАНСФОРМАТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2011 |
|
RU2480710C2 |
| Вентильный электродвигатель | 1988 |
|
SU1527689A1 |
| СИНХРОННЫЙ ГЕНЕРАТОР С ВОЗБУЖДЕНИЕМ ОТ ПОСТОЯННЫХ МАГНИТОВ | 2004 |
|
RU2273942C1 |
| Индуктивный датчик угловых перемещений | 1978 |
|
SU1034129A2 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2015 |
|
RU2596145C1 |
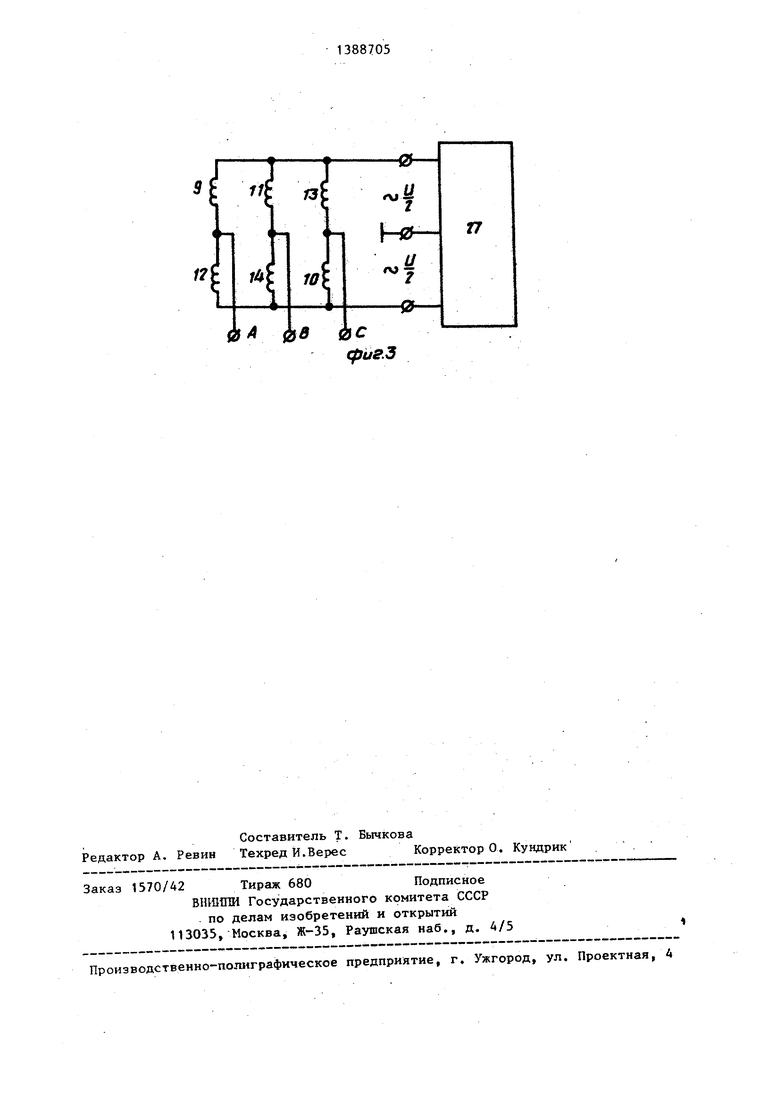
. Изобретение относится к измери- тельной технике и имеет целью повышение точности преобразования угловых перемещений за счет уменьшения влияния технологических погрешностей изготовления и температурной нестабильности крутизны характеристики преобразования индуктивного датчика, который содержит статор 1, выполненный из немагнитного материала и имеющий равномерно расположенные по окружности отверстия 2 с запрессованными в них ферромагнитными втулками 3-8. Втулки охвачены витками секций 9-14 т-фазной обмотки, индуктивное сопротивление которых, зависящее от степени намагниченности втулок, определяется угловым положением ротора 15, имеющего смежно расположенные магнитотвердые 16, 17 и магнитомягкие 18, 19 полюса. Секции обмотки индуктивного датчика могут быть расположены в двух рядом расположенных основном и дополнительном отверстиях с вставленными в них втулками, благодаря чему обеспечивается более плавное изменение их индуктивности за интервал времени прохождения мимо них магнитотвердого полюса ротора 15. Б результате, форма фазных напряжений, формируемых на выходе датчика, больше приближается к синусоидальной, что повышает точность преобразования угловых перемещений. 3 ил. i СЛ
сриг.1
ГТ
{
i
i A 0c
сриг.З
heГ7
i
| Магнитомодуляционный датчик углового перемещения | 1982 |
|
SU1060936A1 |
