(54) ДИФФЕРЕНЦИАЛЬНЫЙ ИНДУКТИВНЫЙ ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Индуктивный датчик угловых перемещений | 1978 |
|
SU1034129A2 |
| Индуктивный датчик угловых перемещений | 1978 |
|
SU765944A1 |
| Датчик углового положения | 1984 |
|
SU1226038A1 |
| Вентильный электродвигатель | 1988 |
|
SU1527689A1 |
| Магнитомодуляционный датчикпОлОжЕНия | 1979 |
|
SU853376A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |
| Устройство для определения углового положения вала двухфазного синхронного двигателя с магнитной асимметрией ротора | 1988 |
|
SU1640808A1 |
| Магнитомодуляционный датчик углового перемещения | 1982 |
|
SU1060936A1 |
| Устройство для управления многофазным синхронным электродвигателем | 1979 |
|
SU917292A1 |
| Устройство для определения гармонических сигналов частоты вращения вала асинхронного двигателя с фазным ротором | 1982 |
|
SU1067583A1 |
1
Изобретение относится к электротехнике и может найти применение в следящих приводах в качестве измерителя суммы или разности углов пово- рота двух задающих валов.
Известны дифференциальные датчи- . ки угловых перемещений, например дифференцигшьные сельсины
Недостатки дифференциальных сельсинов - большие габариты и болыоая потребляемая мощность, обусловленная прохождением переменного магнитного потока через немагнитные зазоры.
наиболее близким к пр длагаемс 1У по технической сущности и достигаемому результату является устройство, содержгидее ротор, выполненный в виде 2р-полюсного постоянного магнита и кольцевой итхтованный статор с 4ртК закрытгячи пазами и расположенный в них т-фазной секционированной обмоткой, каждая фаза которой выполнена с выводом от средней точки, соединенным с одной из выходных Клемм. Это устройство может быть выполнено с малой аксиальной длиной. Переменный магнитный поток не проходит через возд5П11Ный зазор, замыкаясь по стали вокруг закрытых пазов, что обеспечивает снижение потребляемой мопшости.
В известном датчике все фазы обмотки статора подключаются к общему одноФазному источнику питания, в связи с этим образуется пульсирующий магнитный поток, который не может служить носителем информации об угловом положении сельсина датчика, как это имеет место в дифференциальных сельсинах 2.
10
Недостатком известного устройства является ограниченные функциональные возможности.
Цель изобретения - расширение функциональных возможностей.
15
Поставленная цель достигается тем, что дифференцнальный датчик угловых перемещений содержа1 1ий ротор в виде 2р-пол(осного магнита, кольцевой шихтованный статор, содержащий 4ртК (где
20 К - целое число) зак млтых пазов, расположенную в этих пазах т-фазную секционированную обмотку, каждая фаза которой выполнена: с выводом от средней точки, соединенньм с выходной
25 клекфюй соответствующей фазы, снабжен т-трансформатораили, первичные 6 Jмотки которых подсоединены клеммам, а вторичные обмотки подключены к фазам обмотки статора, при
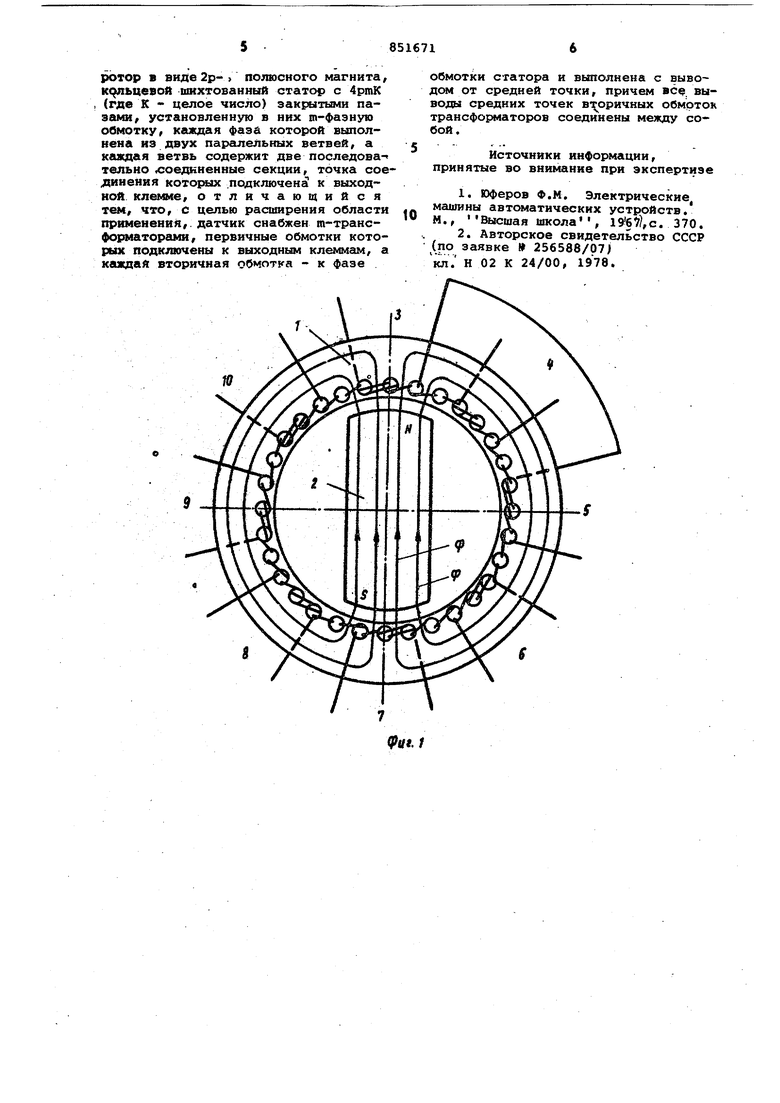
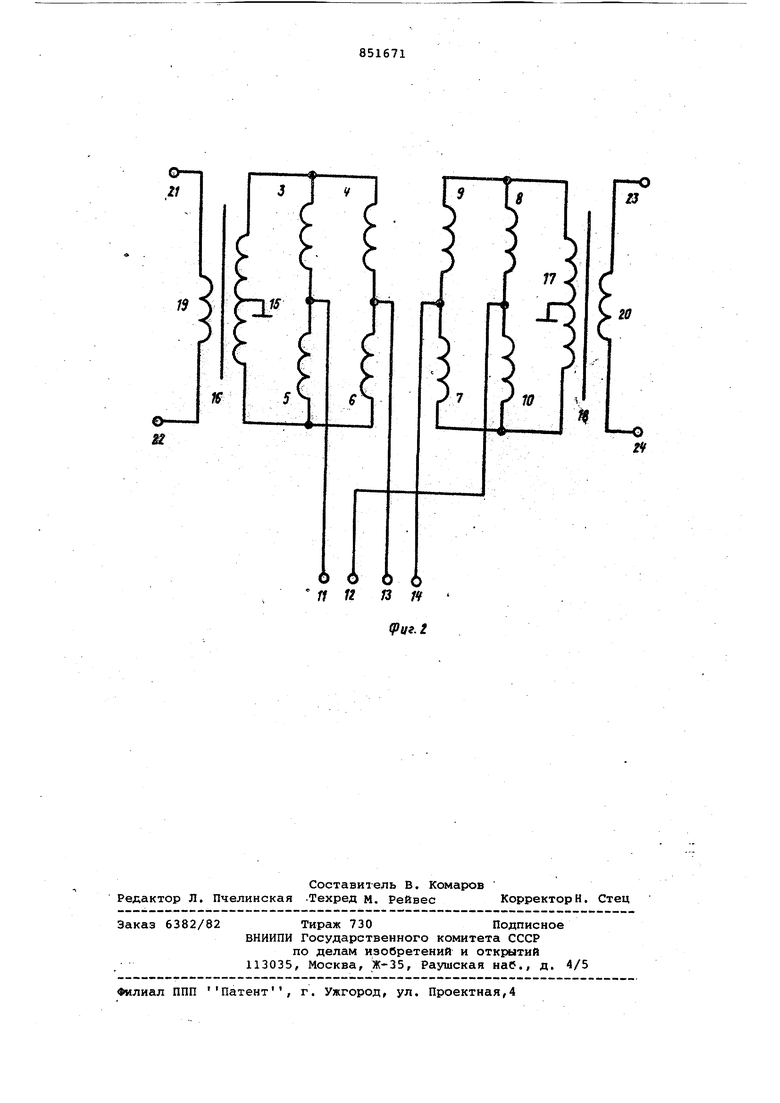
30 этом вторичные обмотки этих трансформаторов выполнены с выводами от сред ней точки и упомянутые выводы соединены между собой. На фиг. 1 показана конструктивная схема электромагнитной части датчика; на фиг. 2 - принципиальная схема датчика. Электромагнитная часть датчика (фиг. 1) содержит статор 1 и ротор 2 выполненный в виде постоянного магнита. Закрытые пазы статора расположены равномерно по окружности, раэделяювдей статор на два ярма, причем сечение наружного ярма больше, чем сечение внутреннего. Число пазов ста тора: , где р - число пар полюсов ротора; m - чисЛо фаз статорной обмотки; К - целое число. При , 2 обмотка статора содержит восемь секций 3 - 10, каждая из которых расположёна в К соседних пазах (на фиг. 1 К 4). Каждые 2р секций, расположенные на статоре с угловым интервалом /2р радиан, т.е. при р 1 две секции, расположенные перпендикулярно, например секций 3 и 5, объединены последовательно в группы. Точки соединения секций подключены к выходным клеммам 11 - 14. . Свобрдные концы секций 3, 4 и 5, 10 соединены между собой и со вторичной обмоткой 15 трансформатора 16. Свободные концы секций 8, 9, 7и10 соединены между собой и со вторичной обмоткой,17 трансформатора 18. Обмо ки 15 и 17 выполнены с выводами от средних точек, и эти выводы объедин ны. Первичные обмотки 19 и 20 транс форматоров 16 и 18 подключены ко , входным клеммам 21 - 24 датчика. Датчик работает следующим образом. На выходные клеммы устройства подается т-фазная система переменных напряжений частоты Ш от датчика угловых перемещений, например от синус но-косинусного вращающегося трансфор матора Ц, sin р sin tut UjQ - UgSin (fb tit|2.) sih out -fc UgCos |Ъ91и out где U- - амплитуда выходного напряжения; (i - угол поворота ротора СКВТ Напряжения на вторичных обмотках трансформаторов 12 и 18 равны U -KU sihi siirnot )соа|%51иш1 где К - коэффициент трансформации. При подаче на зажимы группы пере менного напряжения две соединенные последовательно секции образуют инд тивный делитель напряжения.Индуктив ность каждой секции зависит от угло:вого положения постоянного магнита. Геометрия статора выбрана таким овразом, что магнитный поток Ф постоянного магнита насыщает К соседних зубцов и оставляет ненасыщенным наружное ярмо. В связи с этим в положении, показанном на фиг. 1 секции 3 и 7 обладают минимальной индуктивностью,ч а секции 5 и 9 - максимальной. При повороте ротора на угол If/2 paдиан соотношение индуктивностей меряется на обратное, а при повороте Иа угол , равный «г радиан возвращается к исходн(«у. В связи с этим устройство с 2р-полюсным ротором в электрическсш отношении является 4рполюсным. При соответствующей конфигурации полюсов ротора может быть получена синусоидальная зависимость индуктивности обмотки от угла поворота.. Если за положительное направление вращения ротора 2 принято вращение по Часовой стрелке, напряжения на выходных клеммах 11 - 14 относительно объединенных средних точек обмоток 15 и 17 при р 1 составляют Ug CKUgSiM рсов .5inUJt ±CKUoCOejb&iw 2 ls4nuJt Ug CK UQ sin p 51И 2 d 9i« cot U - icKUoCospcoe foieiM iWt, где с - .относительная глубина модуляции электромагнитной части датчика; cL. - угол поворота ротора 2 относительно статора 1. Напряжение между клеммами 11 и 12 представляет собой выходное напряжение фазы дифференциального датчика угловых перемещений, а напряжение между к лекалами 13 и 14 представляет собой выходное напряжение второй фазы датчика. oS i«t (sinjicos 2d.i tC09p9in 2at) C-KUoS V.U)tS1tt ()jCKUoSiHoitsiMtЪШ 8 9 CKUpSiti uJt {мирsin 2A C09JJC04.2.A) «CKUoSih Ujt COu ( t ±Л.) F CK, Uo &iwAt с.оеу/ где Tf N2oL TalcHM образом, предлагаемое устройство выполняет функции дифференциального . Аналогичным образом может быть сделан трехфазный дифференциальный датчик угловых перемещений (двенадцать секций) Формула изобретения Дифференциальный индуктивный датчик угловых перемещений, содержа ш
ротор в виде 2р- полюсного магнита, к ьцевой шихтованный статор с 4ртК (где К - целое число) закрытыми пазами установленную в них ш-фаэную обмотку, кгикдая фазй которой выполнена из двух паралельных ветвей, а кгикдая ветвь содержит две последова- теЛьно .соединенные секции, точка соединения КОТ01Я1Х пО|дключенг1 к выходной клемме, отличающийся тем, что, с целью расширения области применения,, датчик снабжен т-трансформаторгши, первичные которых подключены к выходным клеммам, а каждая вторичная обмотка - к фазе
W
обмотки статора и вьшолнена с выводом от средней точки, причем все выводы средних точек в оричных обмоток трансформаторов соединены между собой.
Источники информацин, принятые во внимание при экспертизе
кл. Н 02 К 24/00, 1978.
