Изобретение относится к иэмерительной технике и может быть использовано для преобразования угла поворота вала в пропорциональный электрический сигнал.
Известен датчик угла, содержащий кольцевой статор с размещенной на нем фазной обмоткой и ротор в виде двухполюсного постоянного магнитаС
Недостатком этого датчика является ограниченная .чувствительность, что обусловлено уменьшением глубины модуляции при уменьшении габаритов датчика.
Наиболее близким к предлагаемому является магнитомодуляционный датчик углового перемещения, содержащий .цилиндрический статор с равномерно расположенными по его окружности Z отверстиями, размещенную на леремычках между этими отверстиями секционированную tT -фазную обмотку, каждая фаза которой имеет 2/2т диаметрально расположенных пар секций, и четырехполюсный ротор, выполненный из магнитотвердого материала, полярность полюсов которого чередуется в последовательности N -N-S- 5 2 3.
Недостатком известного датчика является ограниченный диапазон измерения угловых перемещений, наибольшая Bejm4HHa которого составляет 180угловых радиусов, из-за неоднозначности отсчета, так как периодичность выходного синусоидального сигнала в два раза выше периода вращения ротора.
Цель изобретения - расширение диапазона измерения угловых пере- , мещений.,
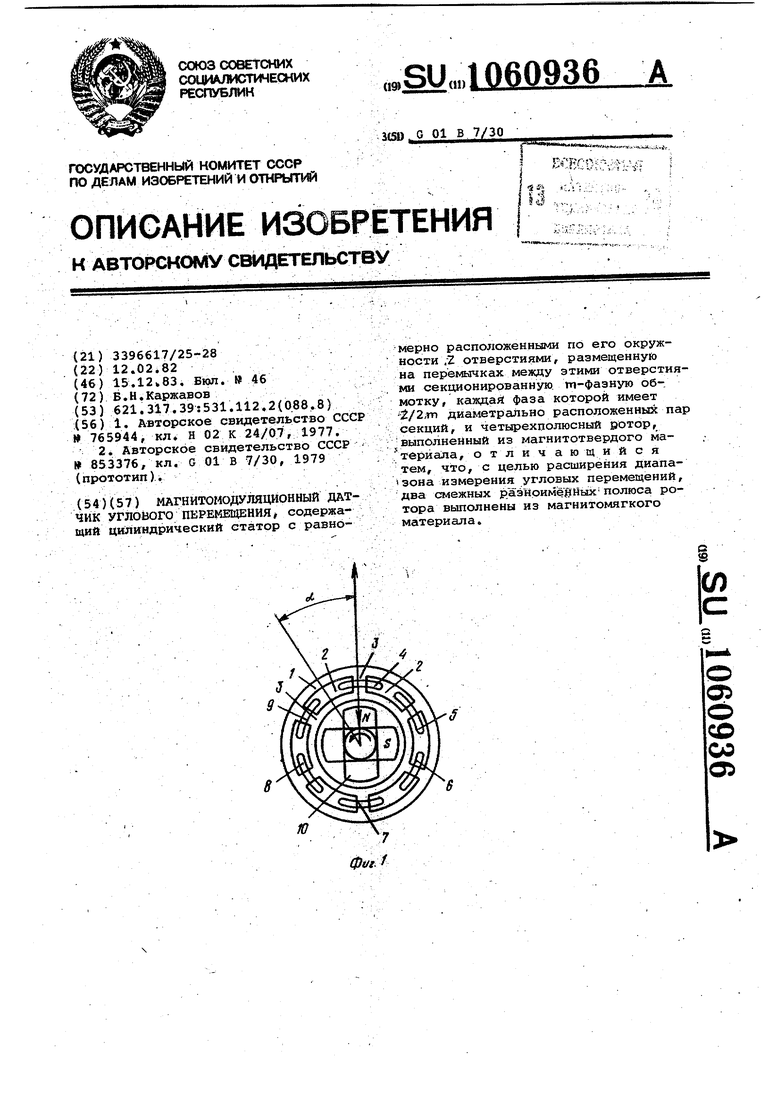
. Поставленная цель достигается тем,что в.магнитомодулйционном датчике углового перемещения, содержащем цилиндрический статор с равномерно расположенными по его окружности 2 отверстиями, размещенную на перемычках между этими отверстиями секционированную ггг-фазную обмотку, каждая фаза которой имеет Z/2m диаметрально расположенных пар секций, и четырехполюсный ротор, выполненный из магнитотве дого материала, два смежных разноименных полюса ротора.выполнены из магнитомягкого материала.
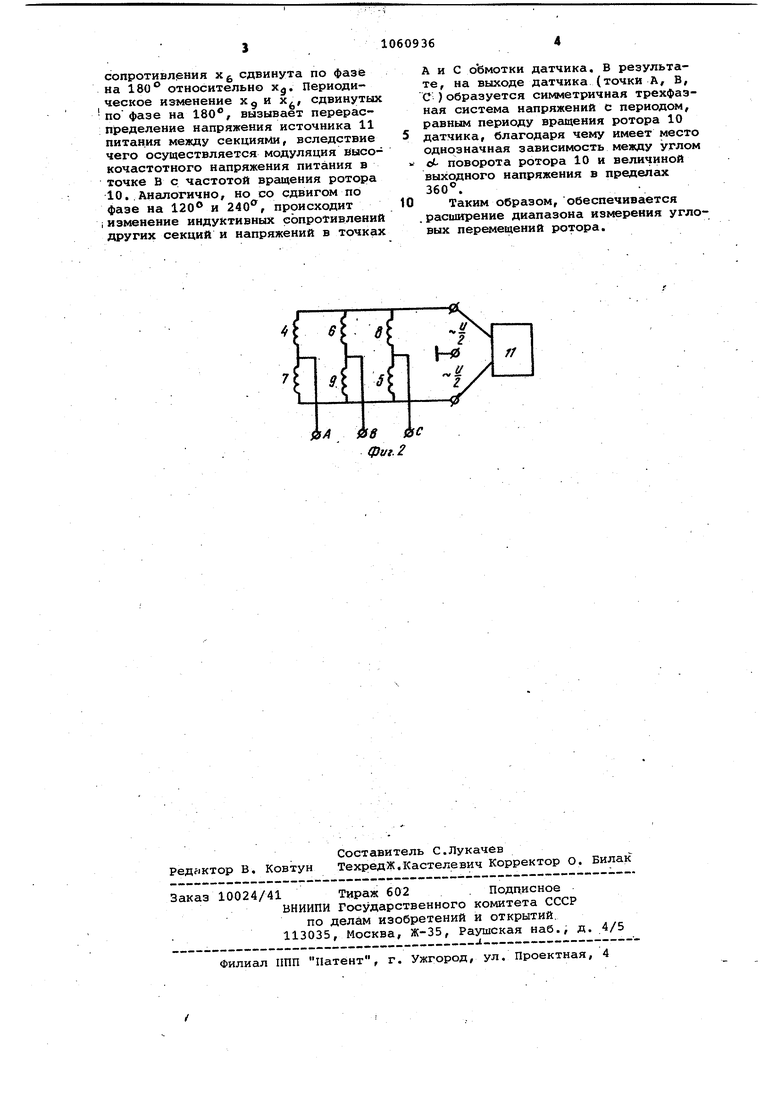
На фиг. 1 представлена конструктивная схема датчика в трехфазном исполнении на фиг. 2 - электрическая схема соединения обмоток датчика.
Датчик содержит цилиндрический статор 1 с равномерно расположенными по его окружности 2 отверстиями 2 (здесь 2 6, гг| 2), размещенную на перемычках 3 между этими отверстиями трехфазную обмотку, имеющую шесть секций 4 - 9 и четырехпголюсный ротор 10. Секции 4-9 обмотки датчика подключены к источнику 11 питания переменного тока. Каждая пара диаметрально противоположных секций 4-7, 6-9и8-5 образует соответствующую фазу обмотки..
Магнитомодуляционный датчик углового перемещения работает следующим образом.
При подключении обмоток датчика к источнику 11 питания переменного тока напряжение этого источника распределяется между секциями 4-7 6 - 9 и 8 - 5 трех фаз обмотки в зависимости от их индуктивного сопротивления X. Выходной сигнал снимается с точки А, В и С соединения диаметрально расположенных секций, образующих соответствующую пару секций. Индуктивное сопротивление каждой секции определяется магнитным состоянием (степенью намагниченности участка внутреннего ярма статора 1 между перемычками, на которых размещена эта секция, а также ближайшая предыдущая и ближайшая последующая секции.
Рассмотрим, например, изменение
индуктивного сопротивления Х, и Хд
пары секций б - 9 фазы В и изменение падения напряжения в точке В при вращении ротора 10 против часовой стрелки..
При указанном на фиг. 1 положении ротора 10, соответствующем угловому- положению о1 О, участок :ярма между перемычками с секциями 4 - 9 - 8 находится в ненасыщенном .состоянии, вследствие чего индуктивное сопротивление XQ секции 9 максимально. При повороте ротора 10 против часовой стрелки участок ярма между перемычками с секциями 4 - 98 начинает насыщаться, снижая индуктивное сопротивление х g секции 9 При повороте ротора 10 на угол oL 90 насыщение участка ярма, определяющего индуктивное сопротивление секции 9, достигает максимума, так как все магнитное поле ротора 10 замыкается черезэтот участок. При этом индуктивное сопротивление Хд секции 9 минимальное и останется таким при дальнейшем повороте ротора. 10 до угла оС . При повороте ротора от угла о, 120° до dL- 210 происходит уменьшение намагниченности участка ярма между перемычками с секциями 4 - 9 - 8 и, как следствие, возрастание индуктивного сопротивления хgсекции 9 до максимума. В диапазоне сбот 210 до 360 индуктивное сопротивление Хд остается максимальныгл и , постоянным. Секция 6 расположена / диаметрально секции 9, поэтому диаграмма изменения ее индуктивного
сопротивления Xg сдвинута по фазе на 180 относительно х, Периоди ческое изменение Хд и х,, сдвинутых по фазе на 180, вызывает перераспределение напряжения источника 11 питания между секциями, вследствие чего осуществляется модуляция высокочастотного напряжения питания в точке В с частотой вращения ротора 10..Аналогично, но со сдвигом по фазе на 120° и , происходит
i изменение индуктивных сопротивлений других секций и напряжений в точках
А и С обмотки датчика. В результате, на выходе датчика (точки А, В, С )образуется симметричная трехфазная система напряжений с периодом, равным периоду вращения ротора 10 датчика, благодаря чему имеет место однозначная зависимость между углом о поворота ротора 10 и величиной выходного напряжения в пределах 360.
Таким образом, обеспечивается .расширение диапазона измерения угловых перемещений ротора.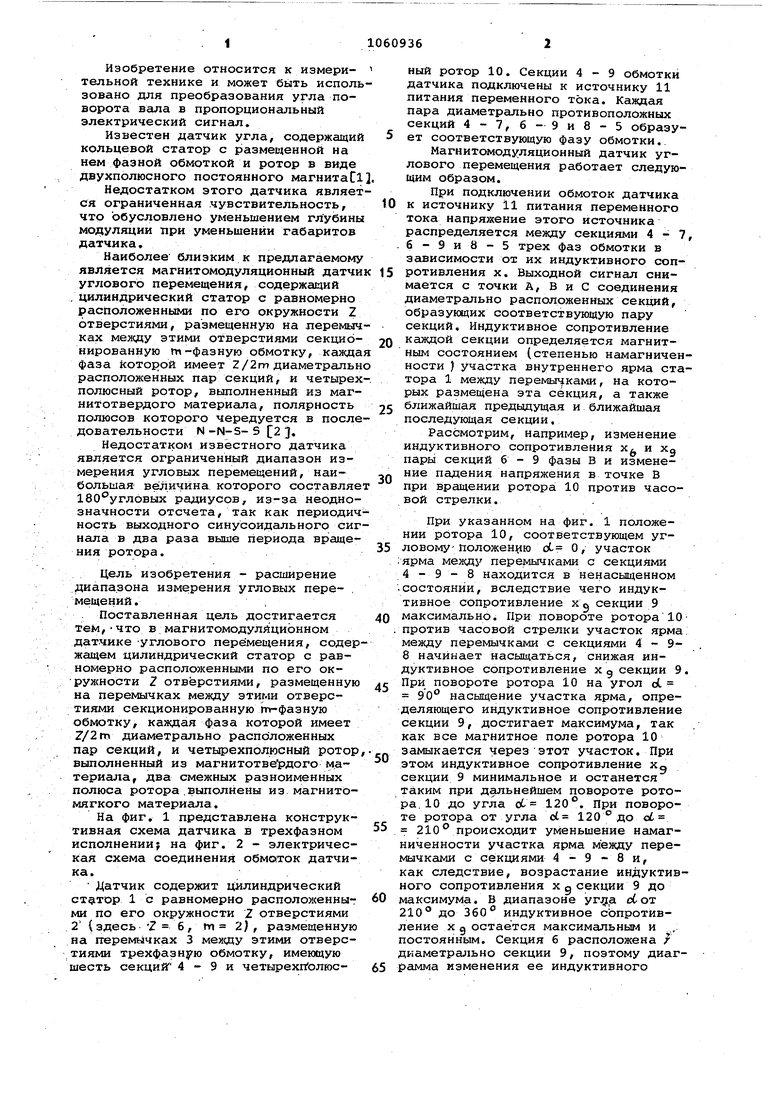
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитомодуляционный датчик углового перемещения | 1986 |
|
SU1388705A1 |
| Магнитомодуляционный датчикпОлОжЕНия | 1979 |
|
SU853376A1 |
| Дифференциальный индуктивный датчикуглОВыХ пЕРЕМЕщЕНий | 1979 |
|
SU851671A1 |
| Датчик углового положения | 1984 |
|
SU1226038A1 |
| Индуктивный датчик угловых перемещений | 1978 |
|
SU765944A1 |
| Индуктивный датчик угловых перемещений | 1978 |
|
SU1034129A2 |
| Совмещенный синхронный двигатель-тахогенератор | 1980 |
|
SU930513A1 |
| ОБМОТКА ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2012 |
|
RU2509402C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ПОГРУЖНЫХ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2011 |
|
RU2463612C1 |
| ЭЛЕКТРИЧЕСКАЯ ВРАЩАТЕЛЬНАЯ МАШИНА С ВНУТРЕННИМИ ПОСТОЯННЫМИ МАГНИТАМИ С МАГНИТОИЗОЛИРОВАННЫМИ ФАЗАМИ | 2012 |
|
RU2604650C2 |
0А 0в 0С фиг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
