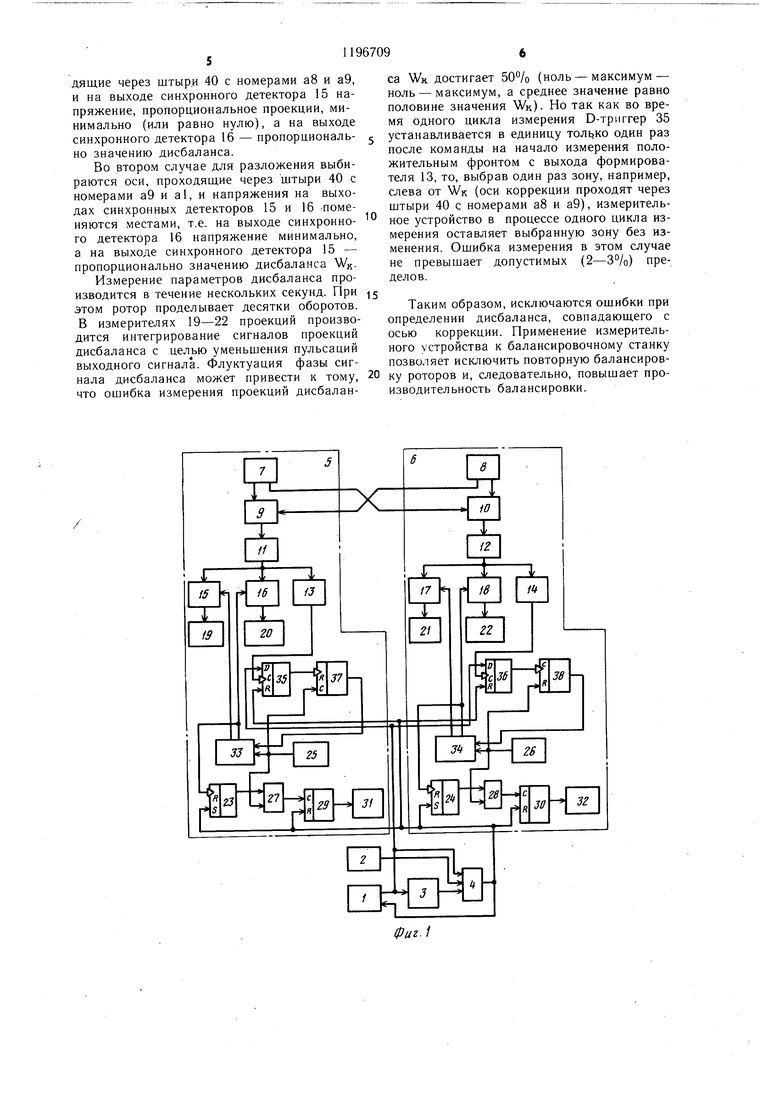
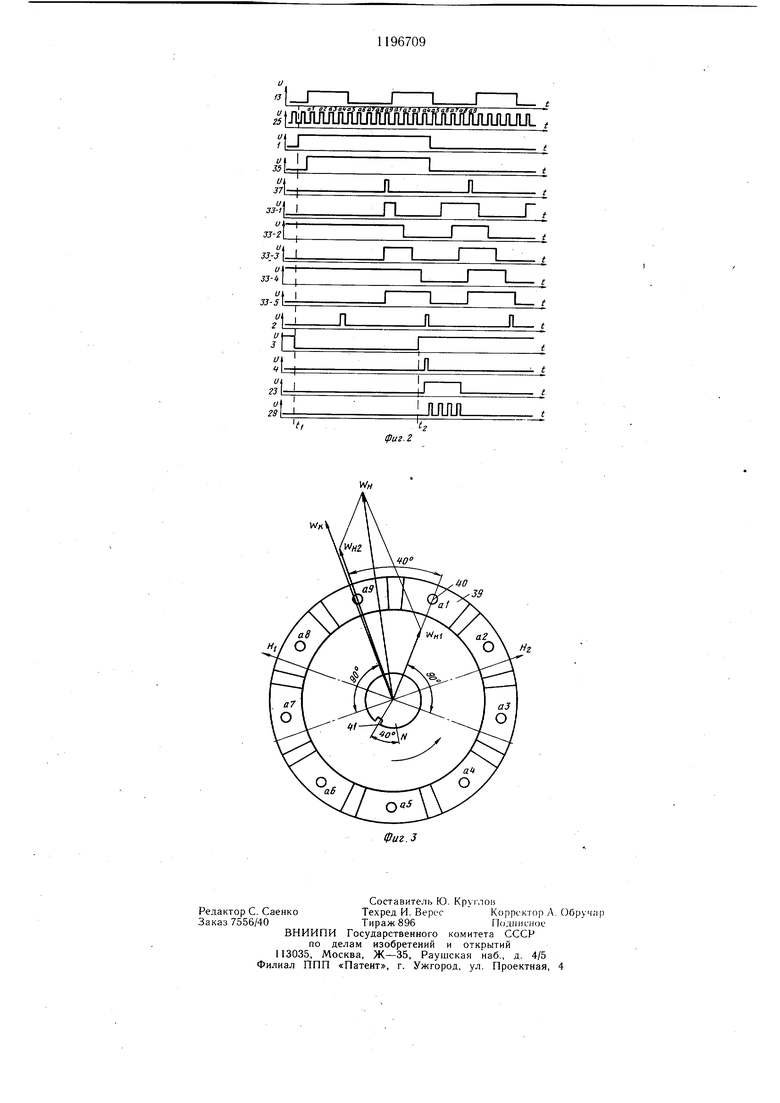
Изобретение относится к балансировочной технике и можеет быть использовано в станках для балансировки роторов электродвигателей при коррекции дисбалансов установкой грузов на штырях между лонатками ротора. Цель изобретения - повышение производительности балансировки путем исключения повторных циклов балансировки, которые являются необходимыми в тех случаях, когда вектор дисбаланса проходит через один из штырей, на который устанавливаются корректируюихие грузы. На фиг. 1 изображена функциональная схема предлагаемого устройства; на фиг. 2 - временные диаграммы работы элементов измерительного устройства; на фиг. 3 - нанесенная на торец ротора асинхронного электродвигателя векторная диаграмма. Устройство содержит блок 1 управления, генератор 2 опорных сигналов, элемент 3 временной задержки, вход которого соединен с выходом блока 1 управления, логический элемент ЗИ 4, первый вход которого соединен с выходом элемента 3 временной задержки, второй вход - с выходом генератора 2 опорных сигналов, третий вход - с выходом блока 1 управления, а выход - с входом блока 1 управления, и два измерительных канала 5 и 6, каждый из которых вьЕполнен в виде соединенных последовательно датчика 7(8) дисбаланса, сумматора 9(10), второй вход которого соединен с выходом датчика 8(7) другого измерительного канала 6(5), усилителя 11(12) и формирователя 13(14), первого и второго синхронных детекторов 15 и 16 (17 и 18), первые входы которых соединены между собой и с выходом усилителя 11(12), двух измерителей 19 и 20 (21 и 22) проекций, связанных соответственно с выходами синхронных детекторов 15 и 16 (17 и 18), первого триггера 23(24), последовательно соединенных датчика 25(26) лопаток, логического элемента 2И 27(28), второй вход которого соединен с выходом триггера 23(24), первого десятичного счетчика 29(30) и цифрового индикатора 31(32), пятиразрядного кольцевого регистра 33(34), первый вход которого соединен с выходом датчика 25(26) лопаток, первый выход - с вторым входом первого синхронного детектора 15(17), а второй выход - с вторым входом второго синхронного .детектора 16(18) и R-входом первого триггера 23(24), второго триггера 35(36), С-вход которого соединен с выходом формирователя 13(14), D-входы вторых триггеров 35 и 36 в каждом из измерительных каналов 5 и 6 соединены между собой и с выходом блока 1 управления, а R-входы - между собой, с вторыми входами десятичных счетчиков 29 и 30, с S-входами триггеров 23 и 24 и с выходом логического элемента ЗИ 4, и второго десятичного счетчиj a 37(38), R-вход которого соединен с выходом второго триггера 35(36), С-вход - с выходом датчика 25(26) лопаток, а выход - с вторым входом кольцевого регистра 33(34). На временной диаграмме работы элементов измерительного устройства (фиг. 2) представлены уровни или форма сигналов на выходах элементов, номера которых соответствуют номеру элемента на фиг. 1, ti -время начала измерения, начало отсчета номера штыря, в котором расположена первая из проекций дисбаланса. На векторной диаграмме, нанесенной на торец ротора 39 асинхронного электродвигателя, W.; и WK - вектор начального дисбаланса ротора 39 в плоскости коррекции, WH и Шнг. - проекции WH на разрешенные направления коррекции (ближайшие к W штыри), HI и Н2 - оси проекций (фазы сигналов, подаваемых на вторые входы синхронных детекторов 15 и 16 в качестве опорного), aj-а - номера штырей 40 ротора 39 в порядке прохождения их над датчиком 25(26) лопаток по ходу враш.ения ротора 39 при измерении дисбаланса. Номер а присваивается первому штырю 40 после вектора WH. Стрелкой обозначено направление вращения ротора 39 при измерении, N - импульс от генератора 2 опорного сигнала, который совпадает с расположением шпоночного паза 41 на валу ротора 39. Устройство работает следующим образом. Колебания опор станка, пропорциональные дисбалансу ротора 39 асинхронного электродвигателя в плоскости опоры (не показаны), воспринимаются и преобразовываются в электрический сигнал датчиком 7(8) дисбаланса, связанным с опорой балансировочного станка. С помощью сумматоров 9 и 10 производится разделение плоскостей коррекции, в дальнейшем в каждом из измерительных каналов 5 и 6 производится определение параметров, дисбаланса в одной из плоскостей коррекции. Выходной сигнал сумматора 9(10) усиливается и фильтруется от помех усилителем 11(12), поступает на входы синхронных детекторов 15 и 16 (17 и 18) и на вход формирователя 13(14), с выхода которого сигнал дисбаланса, преобразованный в прямоугольный, поступает на С-вход (вход синхронизации) триггера 35(36). В момент времени tj (по окончании переходных процессов в усилителе 11) на выходе блока 1 управления устанавливается высокий уровень напряжения, поступающий на вход элемента 3 временной задержки и .на D-вход триггера 35(36). Первым положительным фронтом импульса с выхода формирователя 13(14) после момента времени tj триггер 35(36) устанавливается в единичное состояние и сохраняет это состояние до конца измерения, не реагируя на изменения фазы сигнала дисбаланса, обусловленные уровнем помех. Положительный переход напряжения на прямом выходе триггера 35 устанавливает счетчик 37(38) в нулевое состояние. На счетный вход счетчика 37(38), представляющего собой десятичный счетчик с модулем , поступаютимпульсы с выхода датч1: .а 25(26) лопаток, который представляет собой датчик периферийного действия, например емкостной или индуктивный, с входящим в него формирователем импульсов, что позвЪляет получить импульс малой длительности при прохождении лопатки над датчиком 25(26). Каждый девятый импульс, поступивщий на вход счетчика 37(38), формирует на его выходе импульс, который поступает на второй вход кольцевого регистра 33(34) и ус танавливает всё разряды в единичное состояние. Кольцевой регистр 33(34) с перекрестной связью может быть реализован с помощью пяти К-триггеров, соединенных последовательно. Прямой, и инверсный выходы каждого предыдущего триггера соединены соответственно с С/- и К-входами последующего. Прямой и инверсный выходы пятого триггера соединены соответственно с К- и 3-входами первого триггера. S-входы и С-входы всех триггеров соединены параллельно. Выходные импульсы каждого из триггеров (на прямом выходе) регистра 33(34) (фиг. 2) обозначены 33-1 -33-5. Так как на первый вход регистра 33(34) поступают импульсы с выхода датчика 25(26) лопаток, а на второй вход - с выхода счетчика 37(38), фаза выходных импульсов которого зависит от углового расположения WH, фаза выходных импульсов триггеров регистра 33 зависит от угла WH и расположения лопаток (штырей) на роторе 39. Как видно из векторной диаграммы (фиг. 3) к синхронным детекторам 15 и 16 следует подвести опорный сигнал с инверсного выхода второго триггера регистра 33 (первый выход) и с прямого выхода третьего триггера регистра 33 (второй выход). Эти импульсы ортогональны к направлениям WH (второй выход) и WH (перв1 1й выход). На выходе синхронного детектора 15 - постоянное напряжение, пропорциональное WH,, а на выходе синхронного детектора 16 - WHJL. С выходов синхронных детекторов 15 и 16 (17 и 18) постоянные напряжения поступают cooTBeTCTBejiHO на входы измерителей -19 и 20 (21 и 22) проекций и запоминаются. Каждый из измерителей 19-22 проёкций может быть реализован с помощью, -на пример, аналогового запоминающего устройства и стрелочного прибора (условно не показаны). В момент времени tj на выходе элемента 3 временной задержки устанавливается высокий уровень напряжения, разрешающий прохождение импульсов с выхода генератора 2 опорных сигналов через логический элемент ЗИ 4 на S-вход триггера 23(24). Генератор 2 опорных сигналов представляет собой датчик периферийного действия, установленный в плоскости шпоночного паза 41 ротора 39, и формирует за один оборот ротора 39 один импульс, передний фронт которого совпадает с расположением шпоночного 1,1за 41. На R-вход триггера 23(24) поступают импульсы с второго выхода ,кольцевого регистра 33(34). Так как фаза импульса с выхода генератора 2 опорных сигналов зависит от расположения шпоночного паза 41 балансируемого рото- ра 39, а фаза сигнала второго выхода регистра 33(34) связана с угловым расположением проекции дисбаланса WHI, то на выходе триггера 23 формируется импульс напряжения, длительность которого пропорциональна углу между расположением щпоночного паза 41 и осью коррекцин WH,. Для перевода длительности импульса с выхода триггера 23(24) в цифровую форму сигнал с выхода триггера 23(24) поступает на вход элемента 2И 27, разрешая тем самым прохождение импульсов с выхода датчика 25(26) лопаток на счетный -вход десятичного счетчика 29(30), который установлен в нулевое состояние передним фронтом импульса с. выхода элемента ЗИ 4, постуПИВН1ИМ на второй вход счетчика. 29(30). Таким образом, в десятичный счетчик 29(30) записан порядковый номер (по направлению врашеш;;: ротора 39 при балансировке) штыР М кду лопатками ротора 39, через который проходит ось коррекции WH, . Записанный в счетчик 29(30) номер индицируется цифровым индикатором 31(32). Положительным фронтом импульса с выхода элемента 3 времени снимается раз-решающая команда на выходе блока I управления, и триггер 35(36) устанавливается в нулевое состояние, подготавливая схему синхрониза ши к балансировке следующего ротора. Вторая ось коррекции Wnj легко находится оператором, так как она проходит через следующий по ходу вращения штырь. Аналогично работает и..другой измерительный канал. В случаях, когда начальный дисбаланс к совпадает (или почти совпадает) с из осей коррекции (например, проходяЩей через штырь 40, которому присвоен номер а9) наличие помех может привести к ошибке в определении параметров дисбаланса, так-как фазы сигналов на входах синхронных детекторов 19 и 20 (21 и 22) могут отклоняться на 2-3° от средних значений. В этом случае для разложения вектора дисбаланса на проекции, одна из которых близка .к нулю, измерительным устройством выбирается (в зависимостиот текущего зна чения фазы), сектор слева или справа от штыри 40 с номером а9. В, первом случае для разложения дисбаланса выбираются оси коррекции, проходящие через штыри 40 с номерами а8 и а9, и на выходе синхронного детектора 15 напряжение, пропорциональное проекции, минимально (или равно нулю), а на выходе синхронного детектора 16 - пропорционально значению дисбаланса.
Во втором случае для разложения выбираются оси, проходящие через штыри 40 с номерами а9 и al, и напряжения на выходах синхронных детекторов 15 и 16 -поменяются местами, т.е. на выходе синхронного детектора 16 напряжение минимально, а на выходе синхронного детектора 15 - пропорционально значению дисбаланса WK.
Измерение параметров дисбаланса производится в течение нескольких секунд. При этом ротор проделывает десятки оборотов. В измерителях 19-22 проекций производится интегрирование сигналов проекций дисбаланса с целью уменьшения пульсаций выходного сигнала. Флуктуация фазы сигнала дисбаланса может привести к тому, что ошибка измерения проекций дисбаланса Wx достигает (ноль - максимум - ноль - максимум, а среднее значение равно половине значения WK). Но так как во время одного цикла измерения D-триггер 35 устанавливается в единицу только один раз после команды на начало измерения положительным фронтом с выхода формирователя 13, то, выбрав один раз зону, например, слева от WK (оси коррекции проходят через штыри 40 с номерами а8 и а9), измерительное устройство в процессе одного цикла измерения оставляет выбранную зону без изменения. Ошибка измерения в этом случае не превышает допустимых (2-3%) пределов.
Таким образом, исключаются ошибки при определении дисбаланса, совпадающего с осью коррекции. Применение измерительного устройства к балансировочному станку позволяет исключить повторную балансировку роторов и, следовательно, повышает производительность балансировки.
фиг.г
| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительное устройство к балансировочному станку | 1984 |
|
SU1182297A2 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1096511A1 |
| Способ настройки балансировочного станка | 1984 |
|
SU1388735A1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1415092A1 |
| Устройство для динамической балансировки роторов лучом лазера | 1985 |
|
SU1226091A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1270595A1 |
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ | 1992 |
|
RU2054644C1 |
| Устройство для динамической балансировки роторов лучом лазера | 1988 |
|
SU1515086A2 |
| Устройство для динамической балансировки лучом лазера роторов | 1983 |
|
SU1130753A2 |
ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ, содержащее блок управления, генератор опорных сигналов и два измерительных канала, каждый из которых включает последовательно соединенные датчики дисбаланса, сумматор, второй вход которого соединен с выходом датчика дисбаланса другого измерительного канала, усилитель и формирователь, первый и второй синхронные детекторы, первые входы которых соединены между собой и с выходом усилителя, два измерителя проекций, каждый из которых связан с выходом одного из синхронных детекторов, первый триггер, последовательно соединенные датчики лопаток, логический элемент 2 И, первый десятичный счетчик и цифровой индикатор, пятиразрядный кольцевой регистр, первый вход которого соединен с выходом датчика лопаток, первый выход с вторым входом первого синхронного детектора, а второй выход - с вторым входом второго синхронного детектора и R-входо.м первого триггера, выход последнего связан с вторым входом логического элемента 2 И, а S-вход - с вторым входом первого десятичного счетчика и входом блока упраатения, отличающееся тем, что, с целью повышения производительности балансировки, оно снабжено элементом временной задержки, вход которого соединен с выходом блока управления, логическим элементом ЗИ, первый вход которого соединен с выходом эле; мента вре.менной задержки, второй вход - с выходом генератора опорных сигналов, а выход -- с входом блока управления, введенным в каждый канал вторым триггеро.м, С-вход которого соединен с выходом форсл мирователя этого же канала, D-входы вторых триггеров обоих измерительных каналов соединены между собой, с третьим входом логического элемента ЗИ и выходом блока управления, а R-входы вторых триггеров также соединены между собой, с выходом логического элемента ЗИ, с входами первых триггеров и R-входами первых десятичных счетчиков, и вторым десятичным счетчиком, R-вход которого соединен с высо ходом второго триггера. С-вход - с вьГхо05 дом датчика лопаток, а выход - с вторым входом пятиразрядного кольцевого регистра о со
WK.
33
| Измерительное устройство к балансировочному станку | 1981 |
|
SU981834A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1096511A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
