1
Изобретение относится к устройствам для автоматического направления движения машинно-тракторных агрегатов.
Наиболее близким из известных по технической сущности является транспортное средство с автоматической системой рулевого управления, содержащее щасси с, по меньшей мере, одной управляемой осью, электрогидравлический привод рулевого управления указанной осью, связанный с фотооптическими датчиками 1.
Автоматическая система на известном транспортном средстве, во-первых, не реагирует на плоскопараллельное перемещение трактора вдоль борозды, так как при этом отсутствует временное смещение импульсов от фотодатчиков, и, во-вторых, не обеспечивает точного движения на некоторых операциях, выполняемых трактором (например, внесение удобрений).
Целью изобретения является повышение точности движения по заданной траектории.
Это достигается тем, что фотооптические датчики расположены с внешней стороны колеи транспортного средства вблизи зоны качения одного из колес управляемой оси по линии, перпендикулярной продольной
плоскости симметрии транспортного средства, и на расстоянии двойной зоны нечувствительности автоматической системы между собой, а шасси оборудовано бункером, установленным на другую сторону колеи и заполненным сыпучим веществом для образования полосы,контрастной по отражающей способности по отношению к почве, при этом ширина указанной полосы равна ширине зоны нечувствительности автоматической системы.
10
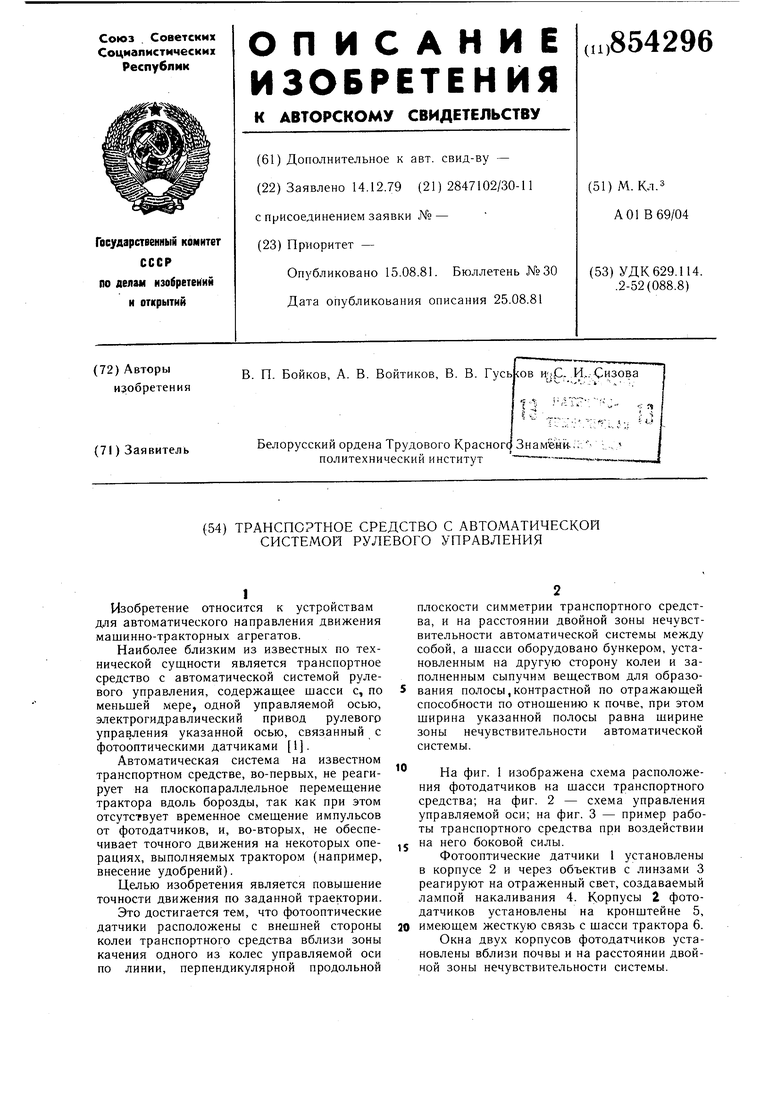
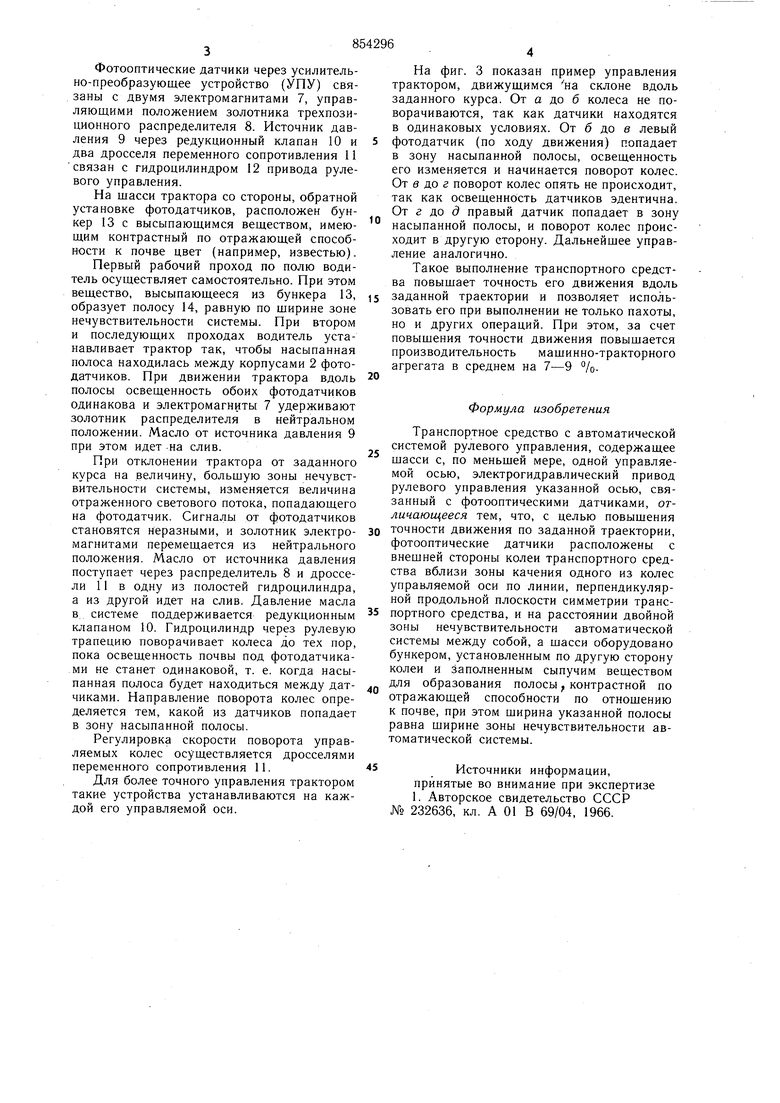
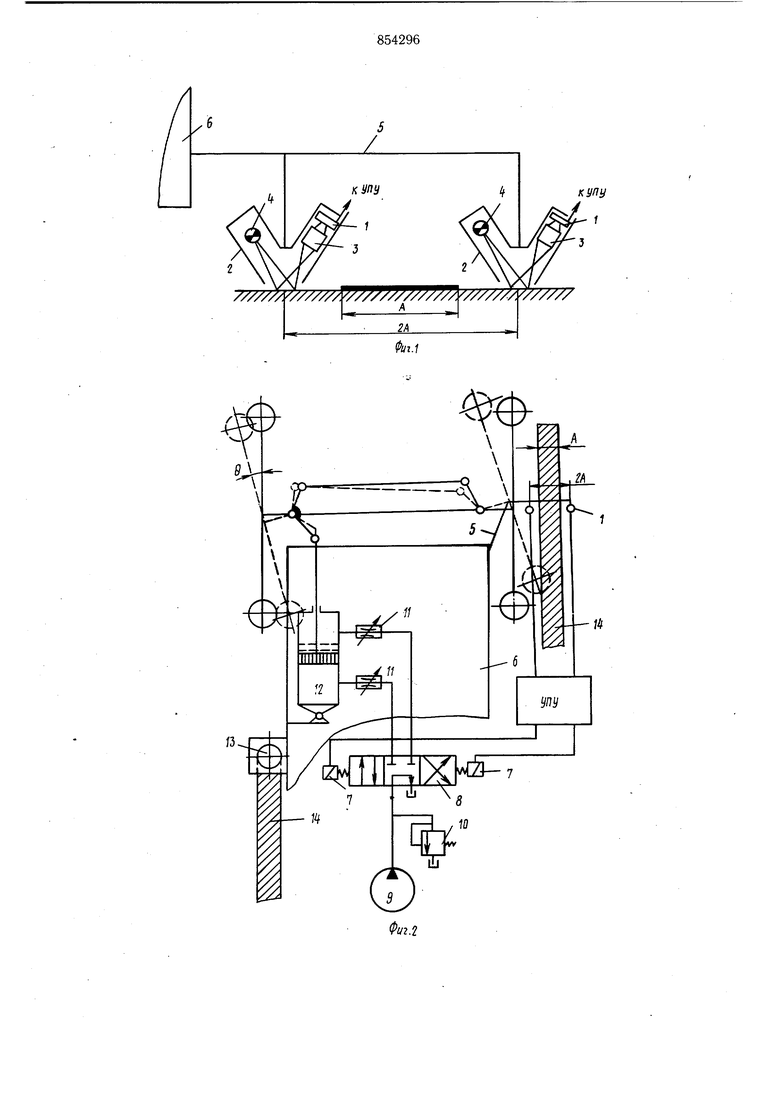
На фиг. I изображена схема расположения фотодатчиков на шасси транспортного средства; на фиг. 2 - схема управления управляемой оси; на фиг. 3 - пример работы транспортного средства при воздействии на него боковой силы.
15
Фотооптические датчики 1 установлены в корпусе 2 и через объектив с линзами 3 реагируют на отраженный свет, создаваемый лампой накаливания 4. Корпусы 2 фотодатчиков установлены на кронштейне 5, имеющем жесткую связь с щасси трактора 6.
20
Окна двух корпусов фотодатчиков установлены вблизи почвы и на расстоянии двойкой зоны нечувствительности системы. Фотооптические датчики через усилительно-преобразующее устройство (УПУ) связаны с двумя электромагнитами 7, управляющими положением золотника трехпозиционного распределителя 8. Источник давления 9 через редукционный клапан 10 и два дросселя переменного сопротивления 11 связан с гидроцилиндром 12 привода рулевого управления. На шасси трактора со стороны, обратной установке фотодатчиков, расположен бункер 13 с высыпающимся веществом, имеющим контрастный по отражающей способности к почве цвет (например, известью). Первый рабочий проход по полю водитель осуществляет самостоятельно. При этом вещество, высыпающееся из бункера 13, образует полосу 14, равную по ширине зоне нечувствительности системы. При втором и последующих проходах водитель устанавливает трактор так, чтобы насыпанная полоса находилась между корпусами 2 фотодатчиков. При движении трактора вдоль полосы освещенность обоих фотодатчиков одинакова и электромагниты 7 удерживают золотник распределителя в нейтральном положении. Масло от источника давления 9 при этом идет-на слив. При отклонении трактора от заданного курса на величину, большую зоны нечувствительности системы, изменяется величина отраженного светового потока, попадающего на фотодатчик. Сигналы от фотодатчиков становятся неразными, и золотник электромагнитами перемещается из нейтрального положения. Масло от источника давления поступает через распределитель 8 и дроссели 11 в одну из полостей гидроцилиндра, а из другой идет на слив. Давление масла в системе поддерживается редукционным клапаном 10. Гидроцилиндр через рулевую трапецию поворачивает колеса до тех пор, пока освещенность почвы под фотодатчиками не станет одинаковой, т. е. когда насыпанная полоса будет находиться между датчиками. Направление поворота колес определяется тем, какой из датчиков попадает в зону насыпанной полосы. Регулировка скорости поворота управляемых колес осуществляется дросселями переменного сопротивления 11. Для более точного управления трактором такие устройства устанавливаются на каждой его управляемой оси. На фиг. 3 показан пример управления трактором, движущимся на склоне вдоль заданного курса. От а до б колеса не поворачиваются, так как датчики находятся в одинаковых условиях. От б до е левый фотодатчик (по ходу движения) попадает в зону насыпанной полосы, освещенность его изменяется и начинается поворот колес. От в до г поворот колес опять не происходит, так как освещенность датчиков эдентична. От г до ( правый датчик попадает в зону насыпанной полосы, и поворот колес происходит Б другую сторону. Дальнейшее управление аналогично. Такое выполнение транспортного средства повышает точность его движения вдоль заданной траектории и позволяет использовать его при выполнении не только пахоты, но и других операций. При этом, за счет повышения точности движения повышается производительность машинно-тракторного агрегата в среднем на 7-9 %. Формула изобретения Транспортное средство с автоматической системой рулевого управления, содержащее шасси с, по меньшей мере, одной управляемой осью, электрогидравлический привод рулевого управления указанной осью, связанный с фотооптическими датчиками, отличающееся тем, что, с целью повышения точности движения по заданной траектории, фотооптические датчики расположены с внешней стороны колеи транспортного средства вблизи зоны качения одного из колес управляемой оси по линии, перпендикулярной продольной плоскости симметрии транспортного средства, и на расстоянии двойной зоны нечувствительности автоматической системы между собой, а шасси оборудовано бункером, установленным по другую сторону колеи и заполненным сыпучим веществом образования полосы, контрастной по отражающей способности по отношению к почве, при этом ширина указанной полосы равна ширине зоны нечувствительности автоматической системы. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 232636, кл. А 01 В 69/04, 1966.
v
л
У7У//////////////У/
777777/У//////Л/////////////Л///// Л
У/////
ПопотКенис. Ф(уг о датчиков б процессе, дбижения трактора
Фиг.Ъ